Изобретение относится к системам автоматического контроля и управления валами объектов с помощью сельсинов, а именно к устройствам дистанционного управления валами объекта.
Известно устройство для дистанционного управления валом преобразователя угол - Код, содержащее датчик, статор которого через электромагнитную муфту и многооборотную зубчатую передачу связан с шкалами точного и грубого отсчета. Устройство используется в дистанционных системах передачи информации об угловых положениях валов ij.
. Недостатки этого устройства заключаются в сложном конструктивном Е ешении датчика и в невозможности управления несколькими валами.
. Наиболее близким к изобретению является устройство дистанционного управления валами объекта, содержащее связанный с рукоятйой сельсиндатчик, линию связи к сельсин-приемник, вал которого в.процессе, настройки устройства непосредственно или через редуктор может быть присоединен к рукоятке органа настройки. Оператор, вращая указанную рукоятку, посредством сельсинов и линии .
связи сообщает это вращение органу настройки. При этом оба вращения происходят синхронно, т.е.- ротор сельсина-приемника следует за- ротрром сельсина-датчика 2.
Недостатком данного устройства,
является то,что в нем привод имеет один единственный выходной вал. Это неудобно, так как в процессе настрой10ки устройства при переходе от одного. органа настройки к другому оператор тратит время на дополнительные рперации, которое является непроизводительным и, как правило, превышает
15 время, необходимое на непосредственную настройку устройства.
Цель изобретения - повышение быстродействия устройства.
Поставленная цель достигается
20 тем, что в устройство для дистанционного управления валами объекта, содержащее сельсин-датчик, соединенный через линию связи с сельсин-приемником, вал которого связан с всшом
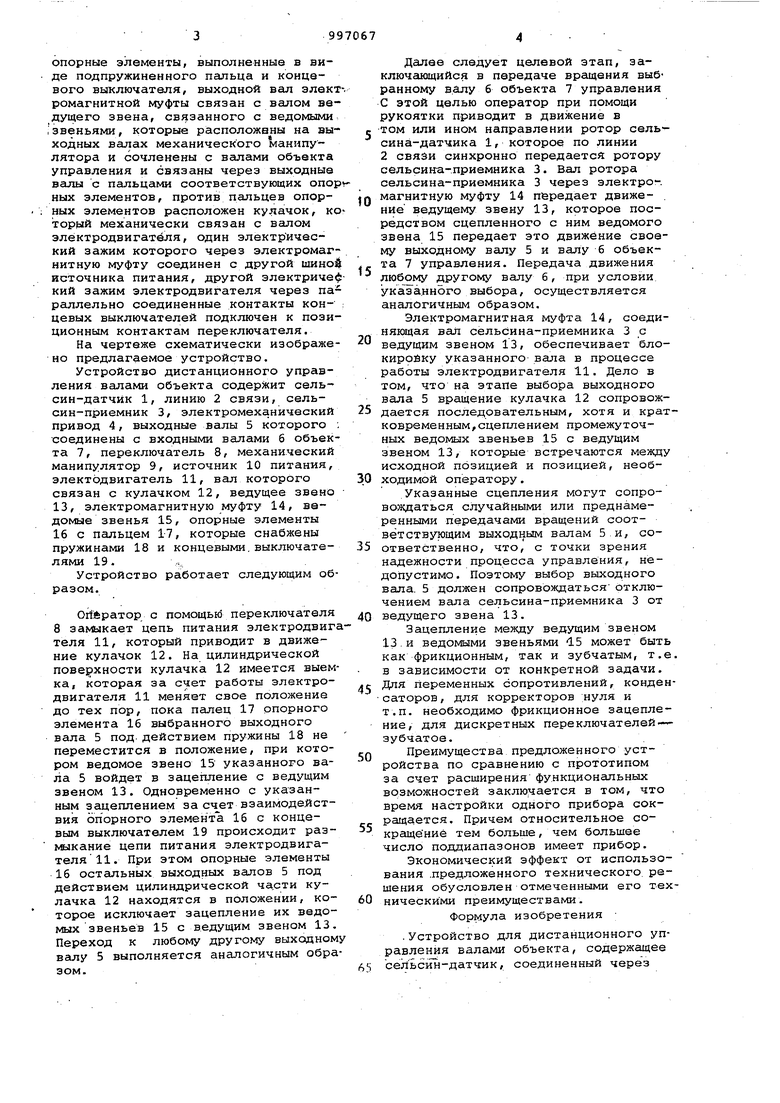
25 электромагнитной муфты, электродвигатель и переключатель, общий контакт которого подключен к одной шине источника питания, введен механический манипулятор, содёржеиций ве30дущее и ведомые звенья, кулачок. опорные элементы, выполненные в виде подпружиненного пальца и концевого выключателя, выходной вал элек ромагнитной муфты связан с валом ве дущего звена, связанного с ведомыми ,звеньями, которые расположены на вы ходных валах механического манипулятора и сочленены с валами объекта управления и связаны через выходные валы с пальцами соответствующих опо ных элементов, против пальцев опорных элементов расположен кулачок, к торый механически связан с валом электродвигателя, один электрический зажим которого через электромаг нитную муфту соединен с другой шино источника питания, другой электриче кий зажим электродвигателя через па раллельно соединенные контакты концевых выключателей подключен к пози ционным контактам переключателя. На чертеже схематически изображе но предлагаемое устройство. Устройство дистанционного управления валами объекта содержит сельсин-датчик 1, линию 2 связи, сельсин-приемник 3, электромеханический привод 4, выходные валы 5 которого соединены с входными валами 6 объекта 7, переключатель 8, механический манипулятор 9, источник 10 питания, электодвигатель 11, вал которого связан с кулачком 12, ведущее звено 13, электромагнитную муфту 14, вадомые звенья 15, опорные элементы 16 с пальцем 17, которые снабжены пружинами 18 и концевыми,выключателями 19. Устройство работает следующим образом. OrlftpaTop с помощьнЗ переключателя 8 замыкает цепь питания электродвига теля 11, который приводит в движение кулачок 12. На цилиндрической поверхности кулачка 12 имеется выемка, которая за счет работы электродвигателя 11 меняет свое положение до тех пор, пока палец 17 опорного элемента 16 выбранного выходного вала 5 под- действием пружины 18 не переместится в положение, при котором ведомое звено 15 указанного вала 5 войдет в зацепление с ведущим звеном 13. Одновременно с указанным зацеплением за счет взаимодействия опорного элемента 16 с концевым выключателем 19 происходит размыкание цепи питания электродвигателя 11. При этом опорные элементы 16 остальных выходных валов 5 под действием цилиндрической ча.сти кулачка 12 находятся в положении, которое исключает зацепление их ведомых звеньев 15 с ведущим звеном 13. Переход к любому другому выходном валу 5 выполняется аналогичным обра зом. Далее следует целевой этап, заключающийся в передаче вращения выбранному в.алу 6 объекта 7 управления С этой целью оператор при помощи рукоятки приводит в движение в том или ином направлении ротор сельсина-датчика 1, которое по линии 2 связи синхронно передается ротору сельсина-приемника 3. Вал ротора сельсина-приемника 3 через электро-, магнитную муфту 14 передает движение ведущему эвену 13, которое посредством сцепленного с ним ведомого звена 15 передает это движение своему выходному валу 5 и валу 6 объекта 7 управления. Передача движения любому другому валу 6, при условии указанного выбора, осуществляется аналогичным образом. Электромагнитная муфта 14, соединяющая вал сельсина-приемника 3 с ведущим звеном 13, обеспечивает блокиройку указанного вала в процессе работы электродвигателя 11. Дело в том, что на этапе выбора выходного вала 5 вращение кулачка 12 сопровождается последовательным, хотя и кратковременным, сцеплением промежуточных ведомых звеньев 15 с ведущим звеном 13, которые встречаются между исходной позицией и позицией, необходимой оператору. Указанные сцепления могут сопровождаться случайными или преднамеренными передачами вращений соответствующим выходным валам 5.и, соответственно, что, с точки зрения надежности процесса управления, недопустимо . Поэтому выбор выходного вала. 5 должен сопровождаться отключением вала сельсина-приемника 3 от ведущего звена 13. Зацепление между ведущим звеном 13 и ведомыми звеньями 15 может быть как фрикционным, так и зубчатым, т.е. в зависимости от конкретной задачи. Для Переменных сопротивлений, конденсаторов , для корректоров нуля и т.п. необходимо фрикционное зацепление, для Дискретных переключателей-зубчатое. Преимущества предложенного устройства по сравнению с прототипом за счет расширения функциональных возможностей заключается в том, что время настройки одного прибора сокращается. Причем относительное сокращениё тем больше, чем большее ЧИСЛО поддиапазонов имеет прибор. Экономический эффект от использования .предложенного технического решения обусловлен отмеченными его техническими преимуществами. Формула изобретения ; .Устройство для дистанционного управления валами объекта, содержащее сеЛьсйн-датчик, соединенный через
линию связи с сельсин-приемником, вал которого связан с валом электромагнитной муфты, электродвигатель и переключатель, ойщий контакт которого подключен к одной шине источник питания, отличающееся тем, что, с целью повышения быстродействия устройства, в него введен механический манипулятор, содержайщй ведущее и ведомые звенья, кулачок, опорные элементы, выполненныев виде подпружиненного пальца и концевото выключателя, выходной ваш электромагнитной муфты связан с валом ведущего звена, связанного с ведоьшмя эвенБЯМи, которые расположевы на выходных валах механического манипулятора и сочленены с валами объекта управления.и связаны через выходные валы-с пальцёши соответствующих опорных элементов, против
/5
пальцев опорных элементов расположен кулачок, который механически связан с валом электродвигателя, один электрический згиким которого через электромагнитную муфту соединен с другой шиной источника пита.ния, другой электрический зглсим электродвигателя tiepes параллельно соединенные контакты концевых выключателей подключен к ПОЭИШ1ОЯНЬО4 КОНTaKTeiM переключателя.
Источники, информации, Щ)инятые во внимание при экспертная
1.Авторское свидетельство СССР по заявке №2909008/18-24,
кл. G 08 С 9/04, 19804
2.Панкин В.Е. Акалого-цкфроЛрл преобразование угловых положений сельсинов и вращающихся трансфо1Я4аторов. Обзоры по технике, вып. 23, 1969,.: с, 30-31 (прототип.

| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимное устройство | 1981 |
|
SU1009630A1 |
| Устройство для закатки изделий | 1983 |
|
SU1183234A1 |
| Устройство для выравнивания скорости ножей летучих ножниц | 1980 |
|
SU975256A1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| Стенд для испытаний рулевых механизмов | 1988 |
|
SU1548693A1 |
| УСТРОЙСТВО для ВВЕДЕНИЯ РАДИОАКТИВНЫХ РАСТВОРОВ В ЛИФМАТИЧЕСКУЮ СИСТЕМУ | 1972 |
|
SU329894A1 |
| Устройство для измерения в роторных экскаваторах толщины стружки | 1959 |
|
SU133412A1 |
| Зуборезный станок для обработки конических колес | 1962 |
|
SU244845A1 |
| Копирующий манипулятор | 1979 |
|
SU812562A1 |
| АДАПТИВНАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2239576C2 |
