Изобретение относится к машиностроению и может быть использовано в микророботах.
Известен шарнир манипулятора, включающий сферическую опору, корпус со сферической полостью. На корпусе с возможностью вращения установлены четыре ролика, два из которых снабжены приводами. Ролики взаимодействуют со сферической опорой.
Устройство обладает ограниченной долговечностью из-за больших контактных напряжений в зоне контакта роликов со сферой.
Известен также сферический шарнир манипулятора, в котором привод поворота осуществляется посредством вибрирующего стержня.
В данном устройстве для управления поворотом предполагается изменять направление оси стержня, что усложняет конструкцию, кроме того, здесь увеличивается сопротивление повороту, так как вибрирующий стержень прижимает сферу к корпусу.
Цель изобретения - упрощение конструкции шарнира и повышение надежности.
Это позволит создавать простые и надежные микроманипуляторы, способные работать в любой среде.
Для достижения этой цели в шарнире манипулятора, содержащем сферическую головку, охватывающую опору и привод перемещения сферической головки, установленной в корпусе опоры, согласно изобретению привод перемещения выполнен в виде микровибраторов, собранных в две группы, расположенные в взаимно перпендикулярных плоскостях, проходящих через центр опоры, причем в каждой группе два оппозитно расположенных микровибратора наклонены к сферической поверхности опоры в одну сторону, а два других оппозитно расположенные микровибратора наклонены в другую сторону.
На фиг.1 представлен шарнир манипулятора в разрезе; на фиг.2 - вид сверху.
Шарнир манипулятора содержит сферическую головку 1, корпус 2, в котором подвижно установлена сферическая головка 1. В корпусе 2 установлены микровибраторы 3, таким образом, что они собраны в группы по четыре микровибратора. Каждая группа расположена в плоскости, проходящей через центр шарнира. Две плоскости взаимно перпендикулярны. Микровибраторы установлены под углом к сферической поверхности опоры, причем микровибраторы 3 и 4 наклонены в противоположную сторону по отношению к наклону микровибраторов 5 и 6.
Устройство работает следующим образом.
При включении микровибраторов 3 и 4 сферическая головка под влиянием микровоздействий поворачивается в направлении по часовой стрелке. Благодаря наклону микровибраторов к поверхности сферической головки возникает момент пары сил, который заставляет сферическую головку поворачиваться вокруг оси, проходящей перпендикулярно к плоскости расположения микровибраторов. При включении микровибраторов 5 и 6 происходит поворот в обратном направлении. Дискретность угла поворота определяется частотой микроударов. Благодаря оппозитному расположению микровибраторов реактивные усилия не передаются на корпус и уменьшается сопротивление трения в шарнире. При включении второй группы микровибраторов происходит поворот сферической головки вокруг другой оси. Включение приводов осуществляется поочередно.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХОБОТ МАНИПУЛЯТОРА | 1992 |
|
RU2008201C1 |
| ХОБОТ МАНИПУЛЯТОРА | 1992 |
|
RU2009884C1 |
| Хобот манипулятора | 1990 |
|
SU1710333A1 |
| Шарнир манипулятора | 1990 |
|
SU1782722A1 |
| РОТАЦИОННЫЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266811C1 |
| Шарнир манипулятора | 1990 |
|
SU1756147A1 |
| Манипулятор | 1987 |
|
SU1505775A1 |
| Шарнир манипулятора | 1989 |
|
SU1743860A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Животноводческое помещение | 1983 |
|
SU1158119A2 |
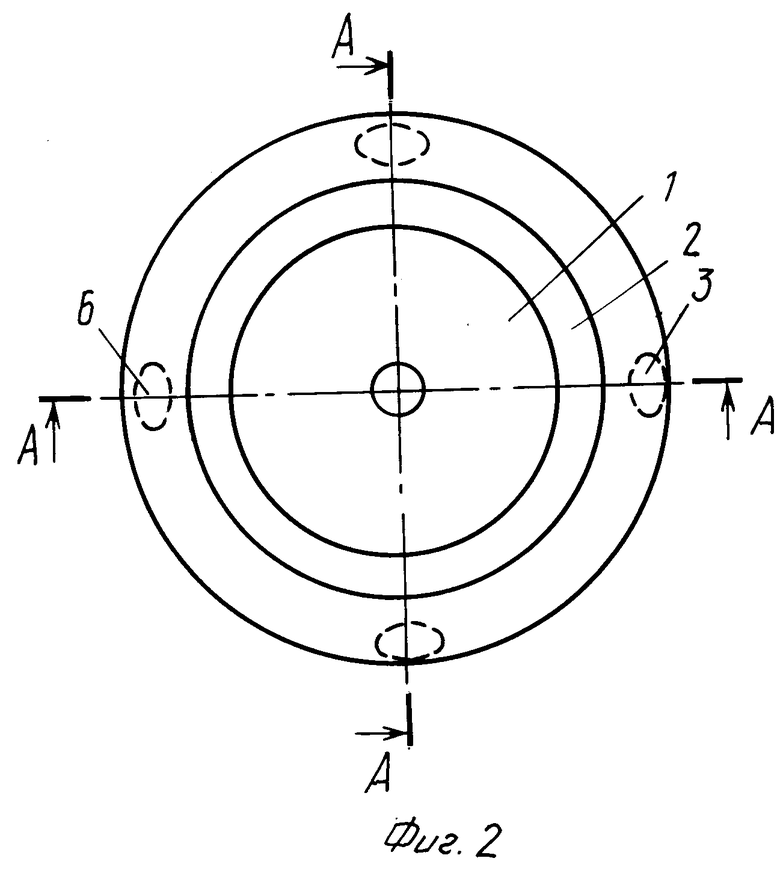
Изобретение относится к машиностроению, в частности к микророботам. Шарнир манипулятора включает сферическую головку 1, опору и привод, выполненный в виде двух блоков микровибраторов 3,4,5 и 6, расположенных во взаимно перпендикулярных плоскостях. При работе микровибраторов 3 и 4 головка поворачивается по часовой стрелке, а при включении микровибраторов 5 и 6 - против часовой стрелки. 2 ил.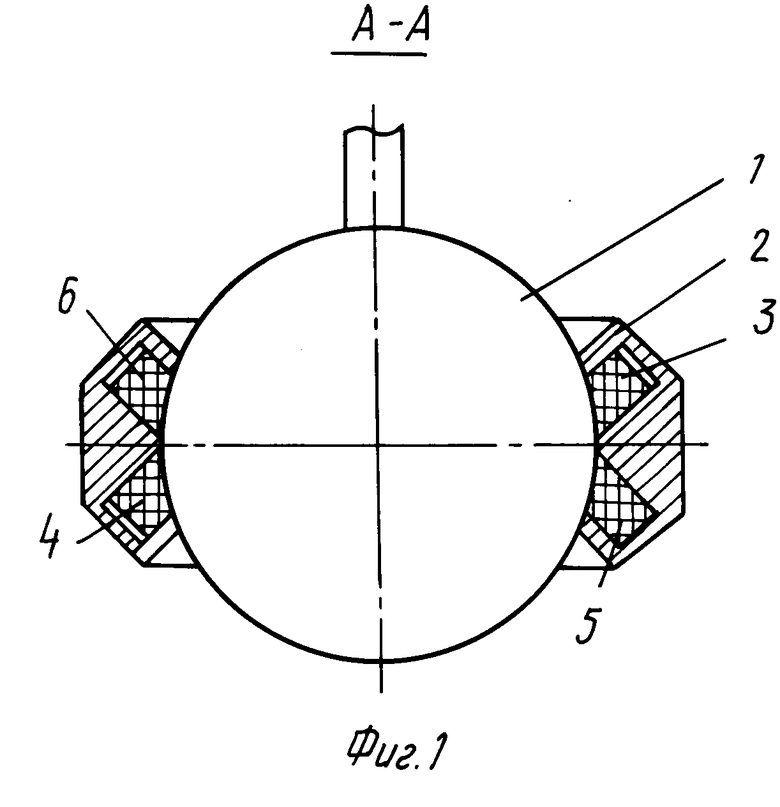
ШАРНИР МАНИПУЛЯТОРА, содержащий сферическую головку, охватывающую ее по сферической поверхности опору и привод перемещения сферической головки, установленный в корпусе опоры, отличающийся тем, что привод перемещения выполнен в виде микровибраторов, собранных в две группы, расположенные во взаимно перпендикулярных плоскостях, проходящих через центр опоры, причем в каждой группе два оппозитно расположенных микровибратора наклонены к сферической поверхности опоры в одну сторону, а два других, оппозитно расположенных микровибратора наклонены в другую сторону.
| Сферический шарнир манипулятора | 1989 |
|
SU1611734A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
