Изобретение относится к техническим средствам измерения (сбора) данных параметров абсолютной вибрации и может найти применение в системах распознавания характера сейсмических волн.
Известно устройство для регистрации абсолютной вибрации в виде скважинного сейсмометра, содержащее цементную трубку, сейсмометр, установленный в полости трубки, коробку с усилителем, патрон, изоляцию, стойку, обсадку.
Это техническое средство не позволяет точно определить характер колебательного возмущения, что снижает область его использования.
Наиболее близким к изобретению является устройство для измерения вибраций, содержащее корпус с основанием и крышкой, оснащенной средствами крепления к корпусу, а в корпусе размещены блок измерения, содержащий датчики вибраций, и блок регистрации.
Это техническое средство позволяет обеспечивать широкий диапазон регистрации абсолютной вибрации. При этом оно может быть использовано при строительстве энергосооружений для снятия различных характеристик вибрационных процессов, происходящих в толще фундамента.
Однако это устройство не может быть использовано в полевых условиях, например, без создания специального опорного фундамента и не позволяет определить характер, свойство сейсмического колебания и произвести точное измерение характера сейсмических возмущений, что снижает область его применения.
Цель изобретения - повышение точности измерения абсолютной вибрации.
Цель достигается тем, что известное устройство для измерения вибраций, содержащее корпус с основанием и крышкой, оснащенной средствами крепления к корпусу, в котором размещены блок измерения, содержащий датчик вибрации, дополнительно снабжено электронным модулем и блоком определения координат, блок измерения включает четыре измерительных модуля, каждый из которых состоит из мембраны, выполненной из тонких профилированных пленок, соединенных в пакеты в виде прямоугольных параллелепипедов, на верхнем основании каждого с четырех сторон установлены консольные подвески, на концах которых закреплены датчики вибраций, а блок регистрации содержит четыре модуля анализатора, при этом первый вход каждого модуля анализатора соединен с выходами датчиков вибраций соответствующего измерительного модуля, а второй вход - с выходом электронного модуля, соединенного с блоком определения координат, а также тем, что консольные подвески выполнены упругими с  -образным и убывающим по логарифмическому закону профилем, причем под верхним изгибом профиля подвески установлены элементы жесткости в виде валика из цветного металла, в центральной части которого выполнено винтовое отверстие, а в верхнем основании подвески выполнена прорезь для установки регулирующего элемента, и тем, что блок определения координат выполнен в виде модуля визирования угловых и азимутальных координат, содержащего подвижный и неподвижный элементы, причем неподвижный элемент выполнен в виде матричного светочувствительного полотна, разделенного на сектора в виде 45о азимутальной координатной сетки, нанесенной на светочувствительное полотно, и снабженного покрытием из тонкого слоя прозрачного вазелинового масла, а подвижный элемент выполнен из многократно подпружиненной пластины с отверстиями, в которых размещены источники света с линзами таким образом, что их оптические оси перпендикулярны плоскости светочувствительного полотна, и на верхней плоскости подвижного элемента размещена фарфоровая пластина, на которой установлен гироскоп с самописцем.
-образным и убывающим по логарифмическому закону профилем, причем под верхним изгибом профиля подвески установлены элементы жесткости в виде валика из цветного металла, в центральной части которого выполнено винтовое отверстие, а в верхнем основании подвески выполнена прорезь для установки регулирующего элемента, и тем, что блок определения координат выполнен в виде модуля визирования угловых и азимутальных координат, содержащего подвижный и неподвижный элементы, причем неподвижный элемент выполнен в виде матричного светочувствительного полотна, разделенного на сектора в виде 45о азимутальной координатной сетки, нанесенной на светочувствительное полотно, и снабженного покрытием из тонкого слоя прозрачного вазелинового масла, а подвижный элемент выполнен из многократно подпружиненной пластины с отверстиями, в которых размещены источники света с линзами таким образом, что их оптические оси перпендикулярны плоскости светочувствительного полотна, и на верхней плоскости подвижного элемента размещена фарфоровая пластина, на которой установлен гироскоп с самописцем.
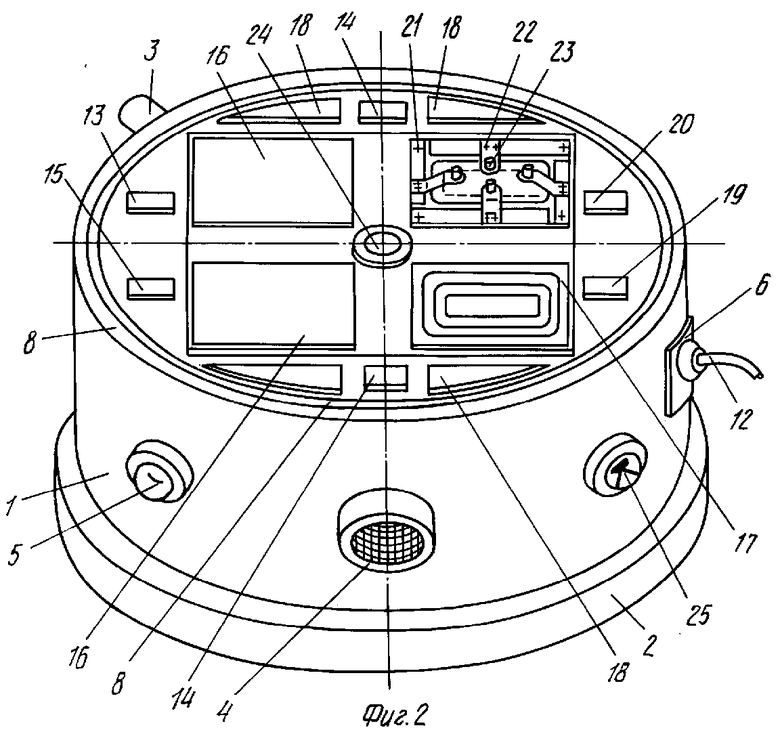
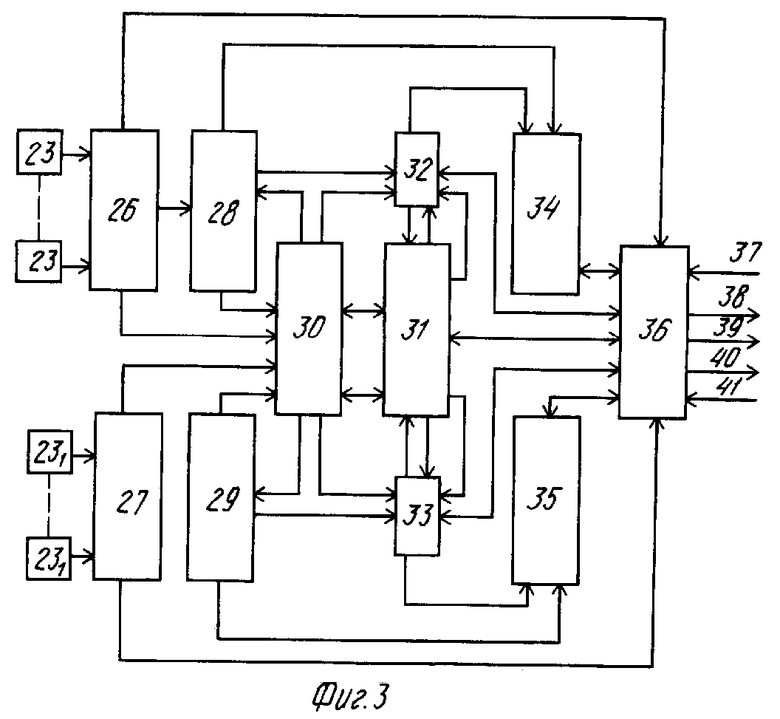
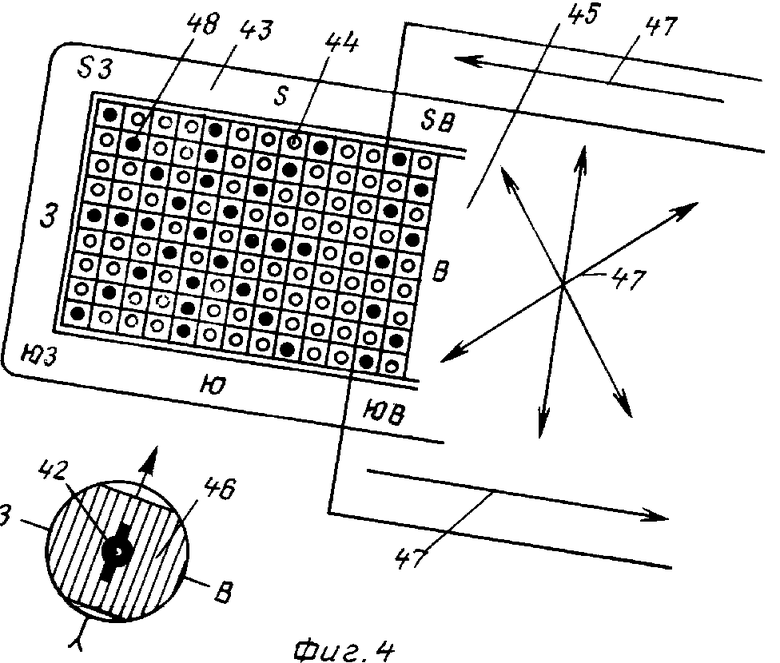
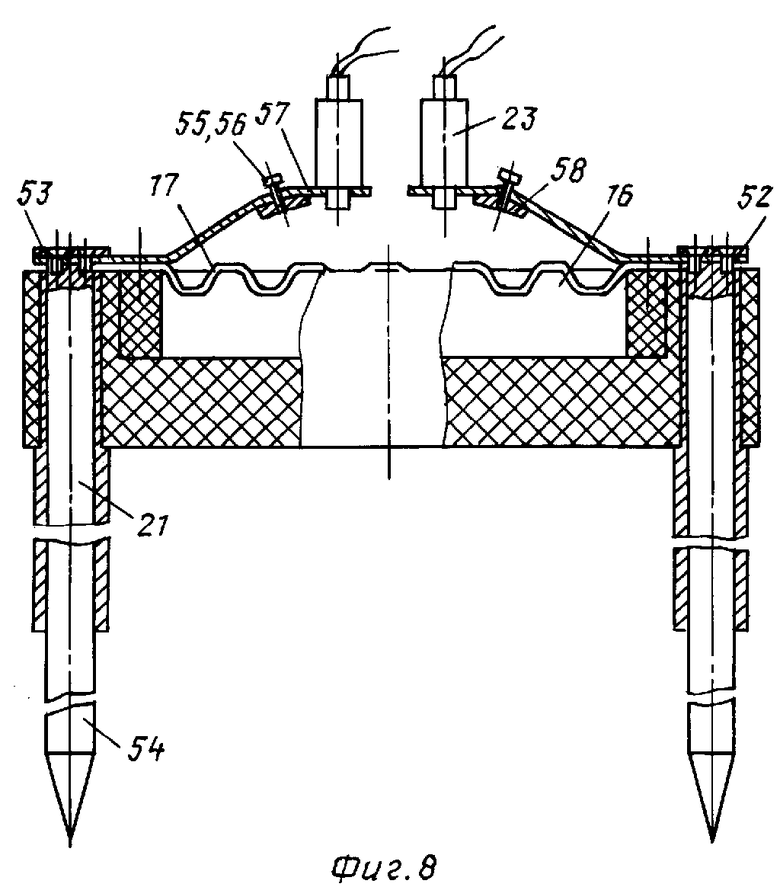
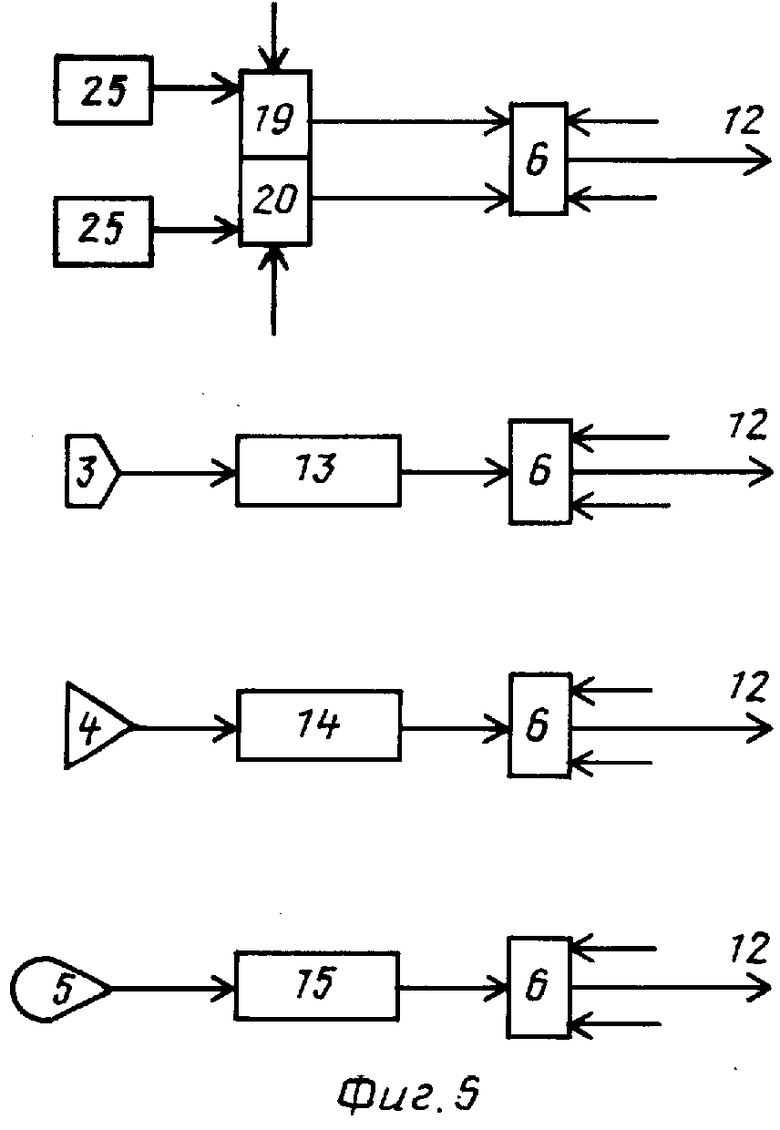
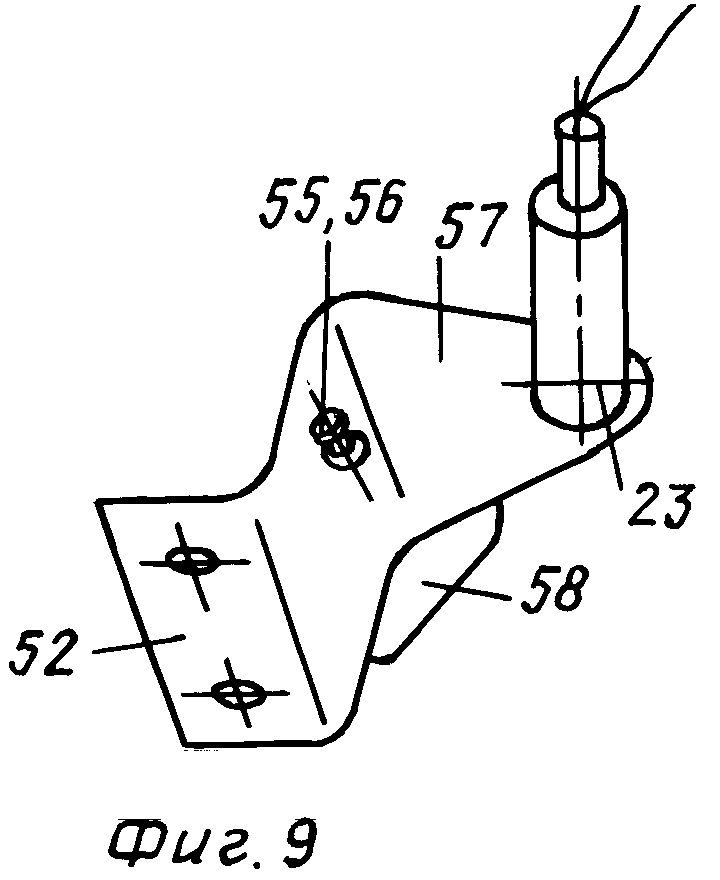
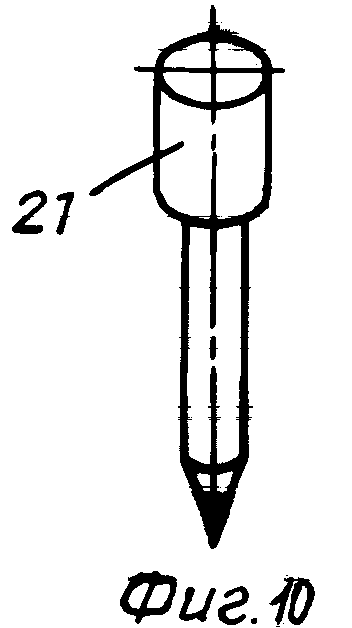
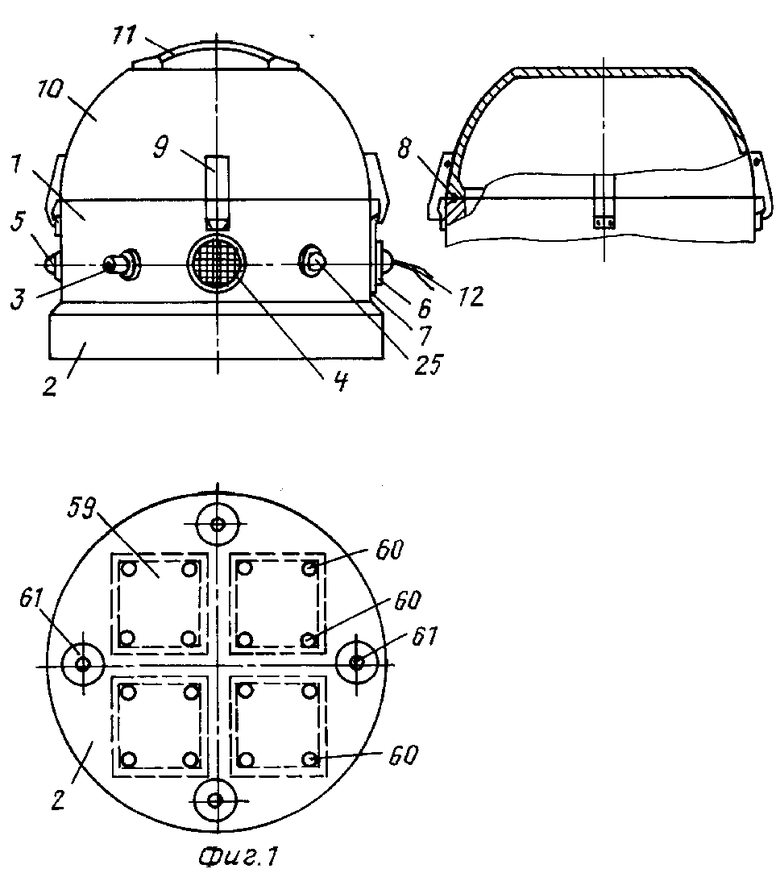
На фиг. 1 показан общий вид устройства для измерения вибраций; на фиг. 2 - внутренняя часть устройства; на фиг. 3 - поблочная схема модуля анализатора; на фиг. 4 - схема модуля визирования; на фиг. 5 представлена электрическая схема подключения температурного и влажностного модулей, датчиков радиационной обстановки, газовой среды и избыточного давления; на фиг. 6 изображена верхняя часть платформы сканирующего узла модуля визирования; на фиг. 7,8 изображен измерительный модуль; на фиг. 9 - консольная подвеска; на фиг. 10 - контактный штырь.
Устройство для измерения вибраций содержит корпус 1, основание 2, датчик 3 радиационной обстановки, выполненный, например, в виде детектора, датчик 4 газовой среды (в виде газозаборного устройства), датчик избыточного давления, выполненный, например, в виде пьезоэлектрического датчика давления, токосъемник 5,6, паз 7 (для размещения токосъемника), бандаж 8, защелки 9, крышку 10, ручку 11, кабель 12, датчик 13 (3) радиационной обстановки, модуль 14 (4) газовой среды, датчик 15 (5) избыточного давления (в виде усилителя пьезотоков), измерительные модули 16, мембрану 17, модуль 18 анализатора, температурный модуль 19, модуль 20 (влажностный), верхнее основание контактного штыря 21, консольную подвеску 22, датчик 23 вибрации, модуль 24 визирования, температурный и влажностный модуль 25, усилители 26, 27; шифраторы 28, 29, блок 30 запуска-сброса, блок 31 оперативной памяти, блоки 32, 33 сравнения, дешифраторы 34, 35, блок 36 анализа, вход 37, выход 38, выход 39, выход 40, вход 41, источник 42 света, матричное поле 43, ячейки 44 светодиодов, сканирующий узел 45, ячейку 46 сканирующего узла, указатель 47 направления движения сканирующего узла, опорные точки 48 координат, гироскоп 49 с самописцем, ленту 50 самописца, пружины 51, нижнее основание консоли 52, заглушки 53, нижнее основание 54, контактные штыри 55, прижимной элемент 56, верхнее основание 57 (консольной подвески), валик 58.
Устройство для измерения вибраций работает следующим образом.
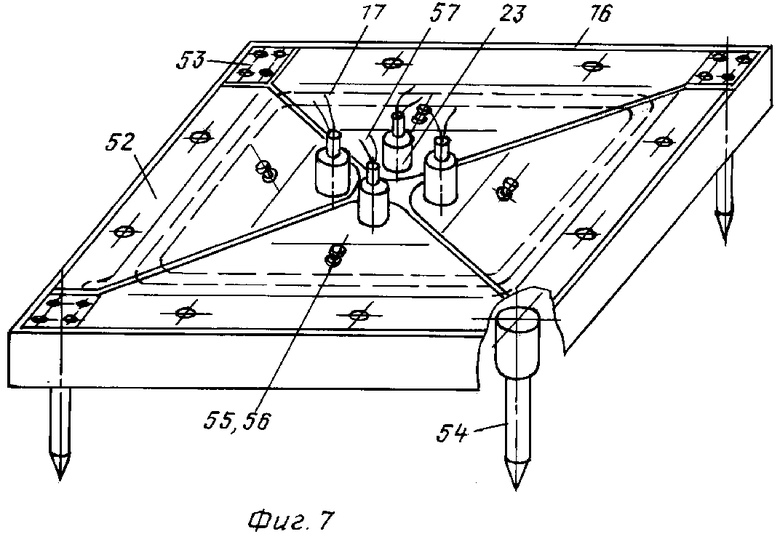
Для первоначальной установки устройство переносится на место сбора данных с помощью ручки 11. Корпус 1 основанием 2 устанавливается, например, на грунт, затем освобождаются защелки 9 и крышка 10 снимается с бандажа 8. Из ниш корпуса 1 вынимаются измерительные модули 16, освобождаются заглушки 53 и в отверстия измерительных модулей 16 вставляются контактные штыри 55 таким образом, чтобы их нижнее основание 54 имело длину, достаточную для прохождения через отверстия в основании 2 корпуса 1 и углубления в грунте на глубину 25 см до 100 см (для этого в комплекте устройства предусмотрены наборы контактных штырей 55 длиной 35 см до 135 см).
Затем с помощью заглушки 53 верхнее основание контактного штыря 21 плотно прижимается к мембране 17. После этой операции измерительные модули 16 устанавливаются в нишах корпуса 1. При этом контактные штыри 55, проходя через отверстие в корпусе 1, вдавливаются в грунт. Устройство устанавливается на место сбора данных таким образом, чтобы стрелка указателя 47 точно была направлена на север.
После завершения установки измерительных модулей 16 производится подключение кабеля 12 к токосъемнику 6.
Затем по командам со станции сбора данных производится регламентная проверка работы датчика 3 радиационной обстановки и датчика 13 (радиационной обстановки), датчика 4 (газовой среды) и модуля 14 (газовой среды), датчика 5 (избыточного давления) и датчика 15 (избыточного давления). При этом прохождение сигнала от датчиков 23 к станции сбора данных, а также от модуля 24 производится путем легкого смещения одного из датчиков 23 и узла 45. Проверка работы самописца в гироскопе 49 проверяется непосредственно (визуально), поскольку даже незначительное смещение платформы узла 45 приводит в действие гироскоп 49. В результате этого на ленте 50 от самописца появляется след, на станцию обработки данных начинают поступать сигналы от модуля 24.
Завершив проверку работы всех узлов измерительного устройства, производится вдавливание крышки 10 в бандаж 8, а с помощью защелок 9 крышка 10 плотно прижимается к корпусу 1.
Затем со станции сбора данных поступает команда на постановку устройства в режим слежения (рабочий режим).
Далее головная волна сейсмического возбуждения, достигнув области размещения устройства, воздействует на его основание 2 и корпус 1. При этом под воздействием приложенных сил твердое тело контактных штырей деформируется, т. е. изменяет свою форму и объем.
При этом, поскольку твердое тело контактного штыря 55 является упругим, то после прекращения действия приложенной на него силы его корпус стремится возвратиться в исходное состояние.
Таким образом, колебательная волна, достигнув нижнего основания, вызывает деформацию всего контактного штыря 55. В результате этого колебание достигает верхнего основания 21 контактового штыря 55 и, стекая по его поверхности, воздействует на мембрану 17, вызывая изменение ее конфигурации. В результате этого действия колебательная волна достигает самой консольной подвески 22 и ее нижнего основания 52. При этом колебательная волна перемещается по телу консольной подвески 22, достигает ее верхнего основания 57 и вызывает срабатывание датчика 23, в результате чего с его выхода на вход усилителя 26 начинает поступать определенной формы напряжение.
Одновременно с выхода усилителя 26 снимается командный сигнал, который подается на входы шифратора 28, блока 30 и блока 36.
С выхода шифратора 28 сигнал уравнения подается на входы дешифратора 34 и блока 30. Блок 30 производит включение схем шифратора 28 и блока 31 и подает сигнал управления на блок 32. При этом с выхода шифратора 28 через блок 30 на вход блока 31 начинает поступать закодированная группа импульсов.
Одновременно с выхода шифратора 28 на вход блока 32 поступает аналогичная (той, что поступает на вход блока 31) группа импульсов, которые, например, могут иметь следующий вид: первая пара - 10011 10001, вторая пара - 11011 10101; третья пара - 11101 11001. Эти пары импульсов, например, несут информацию о характере и конфигурации сейсмической волны, о времени поступления колебательной волны на модуль 17 и о силе сейсмического возбуждения.
Работа блоков 31, 32, 36 и дешифратора 34 следующая.
Особенность блока 31 заключается в том, что в ячейках его памяти (в первом разделе) хранятся математические модели известных видов и разновидностей землетрясений региона, где находятся устройство и математические модели классических форм землетрясений.
Во втором разделе памяти хранятся математические модели известных видов ядерных (и тому подобных) взрывов.
В третьем разделе памяти хранятся математические модели обычных взрывов.
При этом блок 31 оснащен постоянным запоминающим устройством (ПЗУ) и оперативным запоминающим устройством (ОЗУ).
Основным звеном памяти устройства является ПЗУ. Это позволяет, с одной стороны, считывать только заранее записанную информацию. С другой стороны, ПЗУ используется для генерации кода названных программ-разделов библиотечной памяти, которые постоянно используются при функционировании устройства. При этом информация, записанная на кристаллах, имеет то преимущество, которое позволяет при длительном отключении устройства от системы питания не нарушать содержание ранее записанной информации. При этом в устройстве применена такая структура матрицы, которая позволяет пословную выборку информации из двухкоординатной матрицы с двумя степенями дешифрации. При этом пословное считывание по х осуществляется в процессе сравнения данных, поступивших от датчика 23, а пословное считывание по y - в процессе сравнения данных, полученных от элементов модуля 24.
Одновременно с ПЗУ в устройстве функционирует ОЗУ.
При этом одной из функций ОЗУ блока 31 является запись неопознанных блоками 26 или 28 группы импульсов, поступивших на входы названных блоков и не имеющихся в эталонах памяти ПЗУ блока 31. В этом случае блок 36 дает команду блоку 31 пропустить на его входы неопознанные группы импульсов и произвести их запись в ОЗУ.
Одновременно с одного из свободных выходов блока 36 на вход станции обработки данных поступает сигнал о наличии неопознанной информации в памяти ОЗУ. При этом на каждом из выходов 38, 39 и 40 подключен двойной переключатель. Задача двойного переключателя заключается в том, чтобы пропустить на выход сигнал A или сигнал B в зависимости от того, на какой из выходов подается управляющий сигнал.
Станция обработки данных, получив информацию о наличии в ОЗУ неопознанных импульсов, может дать команду на их "транспортировку".
При этом используются входы 37 или 41 блока 36.
Таким образом, особенностью работы блоков 30, 31, 32, 33 и 36 является то, что эти блоки включены в микропроцессорный комплект повышенного быстродействия.
При этом микропроцессорный комплект позволяет иметь две двухканальные схемы хранения информации, иметь двухканальную схему обработки вновь поступающей информации, иметь двухканальную схему анализатора всей поступающей информации и многоканальную систему обмена информации со станцией обработки данных.
В измерительном устройстве применены четыре блока 18. Это позволяет с большой надежностью осуществлять слежение за обстановкой на месте сбора данных.
Блок 24 визирования является центральным звеном во всей структуре устройства.
Он содержит корпус, в котором сделано углубление для размещения матричного поля 43. Матричное поле 43 состоит из ячеек в виде круга, где в углублениях размещены светочувствительные элементы, например светодиоды 44.
На матричном поле 43 нанесены опорные точки 48 координат, которые расположены по динамике сторон света и имеют следующие обозначения на корпусе: север - С, юг - Ю, запад - З, восток - В и промежуточные СВ, СЗ, ЮВ и ЮЗ. Они изображены на фиг. 4 в виде черных кружочков, в самом же устройстве выполнены в виде ячеек и имеющих круглую форму, в которых размещены отражательные элементы, например стеклянные зеркальные линзы. При этом матричное поле 43 с ячейками и опорными точками 48 координат покрыто тонким слоем вазелинового масла, при этом толщина покрытия равна 50 мкм.
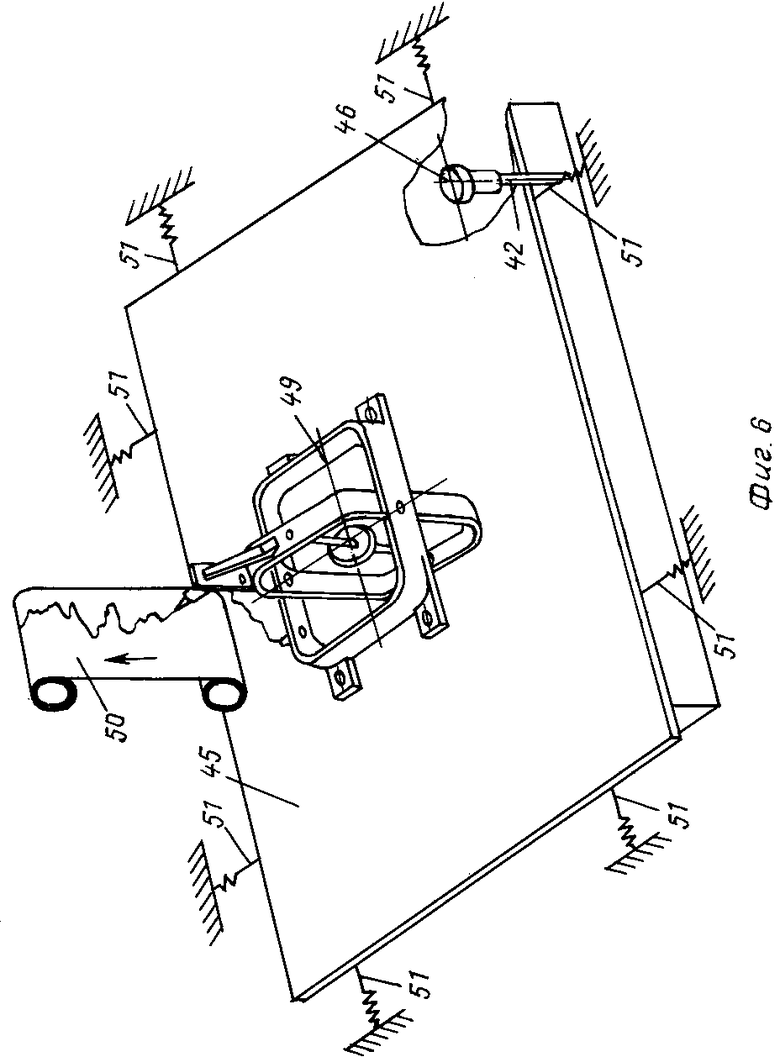
Сверху матричного поля 43 расположен сканирующий узел 45. Сканирующий узел 45 выполнен в виде платформы, в которой в соответствии с координатной сеткой выполнены отверстия в виде ячеек 46, в центре каждой из которых имеется отверстие для размещения в них источников 42 света. Каждая из ячеек 46 сканирующего узла 45 в нижней своей части закрыта стеклянной линзой, которая устанавливается в отверстие платформы на уровне нижней его поверхности.
Технологически нижняя часть платформы сканирующего узла 45 имеет идеально отполированную поверхность. При этом предусмотрено, что замена ячеек 45, вышедших из строя, осуществляется сверху платформы путем снятия с последней пластины, которая выполнена из фарфора или адеального пластика. Пластина жестко скреплена с платформой сканирующего узла 45.
Пластина выполнена таким образом, что ее края выступают над поверхностью платформы. Со всех четырех сторон платформа подпружинена таким образом, чтобы под действием приложенных извне сил она могла бы свободно скользить по поверхности матричного поля 43.
Чтобы снизить эффект трения, на поверхность матричного поля 43 наносится тонкий слой вазелинового масла, что позволяет платформе сканирующего узла 45 свободно перемещаться в любом направлении.
При этом пружины 51, которыми со всех четырех сторон подпружинена платформа сканирующего узла 45, выполнены таким образом, чтобы обеспечить свободное его перемещение в необходимом направлении.
С целью регулировки свободного хода подпружиненной платформы сканирующего узла 45, обеспечения свободного выпрямления и сжатия пружины 51 применено приспособление (на фиг. 3,4,6 не показано).
Установка платформы сканирующего узла 45 на матричное поле 43 производится только в заводских условиях, при этом производится регулировка пружины 51 на выпрямление и сжатие.
Верхнее основание платформы сканирующего узла 45 выполнено в виде пластины, изготовленной из прочного фарфора. На верхнем ее основании, на плоскости, установлен малогабаритный гироскопический прибор с самописцем. Привод гироскопа не показан, однако приведена схема гироскопа с самописцем.
Кроме того, на верхней плоскости пластины сканирующего узла 45 сделаны бороздки с обозначением основных его направлений. При установке прибора на месте сбора данных стрелка указателя 47 направления ориентируется, например, по компасу на север. Бороздки, выполненные на верхней плоскости фарфоровой пластины, заполнены ярким красящим веществом, которое сверху фиксируется влагоустойчивым лаком.
Модуль 24 визирования работает следующим образом.
Колебательная волна, достигнув места установки устройства, воздействует на нижнее основание контактных штырей 21 и основание 2. При этом происходят множественные деформации тела контактных штырей 55 и основания 2 устройства.
В результате приложенных сил происходит смещение платформы сканирующего узла 45 в противоположную сторону от причин, вызвавших ее перемещение. В процессе перемещения сканирующего узла 45 относительно матричного поля 43 происходит и смещение источников 42 света относительно опорных точек 48 координат матричного поля 43. При этом световой поток, образованный источником 42 света, воздействует на светочувствительные элементы матричного поля 43, где на выходах светодиодов 44 начинают выделяться напряжения, которые поступают на входы 23 усилителя 27.
Любое перемещение платформы сканирующего узла 45 приводит в действие гироскоп 49. При этом, поскольку записывающее перо, закрепленное на карданном кольце гироскопа 49, - двумя степенями свободы, одна из которых ограничена пружинами, то на движущейся ленте 50 записываются изменения во времени угловых изменений платформы сканирующего узла 45.
Конструктивное выполнение в данном описании не приводится. Гироскоп 49 с двумя степенями свободы, несущий на своем наружном кольце записывающее перо (см. фиг. 6), остается в стабильном пространстве. Поэтому бумажная лента 50, находящаяся в кассете, которая жестко закреплена в корпусе прибора, при колебаниях платформы сканирующего узла 45, на которой установлен гироскопический самописец, совершает непрерывное перемещение. Именно эти перемещения и фиксируются на ленте 50 в виде кривой изменения во времени угловых скоростей платформы сканирующего узла 45. С целью изменения масштаба записи в приборе предусмотрен механизм перемены передаточного числа между валом мотор-генератора и приводом ленты 50 в кассете самописца.
Генератор вырабатывает одновременно переменный высокочастотный электрический ток для питания двигателя, приводящего во вращение ротор гироскопа 50.
Таким образом записи, полученные с помощью гироскопического самописца, позволяют подробно изучать влияние самых разнообразных факторов на общую динамику работы измерительных устройств. Практика показывает, что внедрение гироскопа в сейсморазведку обусловлено необходимостью контроля за состоянием процессов, происходящих в различных точках земной поверхности.
Вместе с тем, получение множественных характеристик в различных регионах позволит получить более объективную картину постоянных даже самых малых перемещений земной поверхности, что и позволит наряду с другими видами измерений составить прогноз временной возможности повторения сейсмических волнений.
Сигналы, генерируемые элементами схемы модуля 24 визирования, поступающие на входы усилителя 27, отличаются от сигналов, генерируемых элементами схемы измерительного модуля 16, которые поступают на входы усилителя 26.
Это отличие заключается в следующем. Датчики 23 вибрации, входящие в состав измерительного модуля 16, генерируют сигналы с четырьмя ярко отличными и выраженными гармониками. Это объясняется тем, что в процессе настройки измерительного модуля 16 каждый датчик 23 вибрации настраивается на соответствующую частоту. Настройка работы системы мембраны 17 - консольная подвеска 28 - датчик 23 вибрации осуществляется путем изменения жесткости верхнего основания 57. Эта операция выполняется регулировкой прижимного элемента 55, 56, т. е. путем большего или меньшего прижатия валика 58 к верхнему изгибу консольной подвески 22, прижимаемого элементом 55, 56.
Настройка измерительных модулей 16 производится в заводских условиях и после ее окончания прижимной элемент 55, 56 фиксируется, например, мастикой или клеем.
Всего на входы всех измерительных модулей 16 подается 16 различных сигналов от датчиков 23 вибрации. При этом каждый сигнал несет информацию об одном событии, но каждый из 16 датчиков сообщает об этом событии по-своему.
Если предположить, что на одном квадратном километре будет устанавливаться около четырех измерительных устройств, то это позволит получить полную картину процессов, происходящих на месте сбора данных. Особенностью компановки подобного рода устройств является то, что измерительные модули 16 измерительных устройств калибруются одинаково, т. е. первый модуль 16 первого устройства калибруется на основе этих же параметров, что и первый модуль 16 второго измерительного устройства и т. д.
Это позволяет получить точную картину прохождения сейсмической волны на различных участках местности, имеющих различное строение. Однако информация об этом поступит на измерительное устройство, измерительные модули устройств, имеющие одинаковый калибровочный режим настройки как по частотным, так и по амплитудным характеристикам.
В противоположность этому сигналы, снимаемые с выхода узла 45 сканирования, представляют собой весьма пестрое гармоническое сочетание. Это происходит в силу того, что каждая ячейка матричного поля 43 способна выдать информации только ей присущие, при этом при каждом движении узла 45 происходит все новое и новое сочетание групп ячеек 44 светодиодов.
Каждая ячейка 44 имеет только ей присущий вид и свой порядковый номер.
Известно, что вопросы прогнозирования землетрясений представляют известную проблему. Поэтому измерительное устройство и, в частности, сканирующий узел 45 должен явиться опорной точкой в накоплении информационных данных о характере землетрясений, а в последующем - при накоплении информации в ПЗУ блока 31. Устройство, анализируя вновь поступающую информацию, сравнивает ее с носителем библиотечной памяти устройства с целью выдачи на одном из выходов блока 36 предупреждения о надвигающейся колебательной буре.
Датчик 3 и модуль 13 работают следующим образом.
Под воздействием ионизирующих излучений в датчиках 3 радиационной обстановки, выполненных в виде газоразрядных счетчиков и расположенных в корпусе 1, возникает кратковременный газовый разряд, который поступает на вход модуля 13 радиационной обстановки, выполненный, например, в виде усилителя-нормализатора импульсов, ждущего релаксационного генератора, построенного на двух тиратронах, для повышения чувствительности входа нормализатора в схему включен конденсатор, при этом к выходу исходной схемы подключен усилитель мощности, к одному из выходов которого подключено и дополнительное устройство, способное инфицировать акустическую и визуальную информацию, второй выход усилителя мощности соединен с токосъемником 6, выход которого подключен к кабелю 12, соединенному с входами станции обработки данных, которая и ведет обработку всей поступающей информации. При этом, если на месте сбора данных возникает повышенный уровень радиационного фона, то в этом случае с выхода станции сбора данных может быть подана команда предупреждения об опасности.
Сигнал через кабель 12 и токосъемник 6 поступает на один из двух входов модуля 13, и на выходе устройства начнет выделяться сигнал, который приводит в действие информационную систему модуля 13, а с выхода будут сниматься визуальные и звуковые сигналы, которые хорошо видны и слышны на расстоянии 100-150 м.
Датчик 4 и модуль 14 содержат сигнализатор концентраций, выполняющий функции контроля и автоматической сигнализации о наличии в воздухе горючих газов, паров и их смесей. Датчик прибора расположен вместе с датчиком сигнализатора, предназначенным для автоматического контроля на местности, где возможно выделение горючих газов и паров метана, пропана, бутана, гексана и их сочетаний. Выходы датчиков названных приборов соединены с модулем 14 (газоанализатором окружающей среды), содержащим два операционных усилителя, соединенных с двухканальным усилителем мощности, выход которого соединен с токосъемником 6, выход которого подключен к кабелю 12, соединенному с преобразователями сигналов.
Температурный 19 и влажностный 20 модули представляют одну из основных частей измерительного устройства. Это определяется тем, что температура ее колебания и устойчивое состояние в сочетании с резкими патологическими изменениями могут быть предвестниками надвигающихся земных бурь.
Вместе с тем, немаловажное значение в прогнозировании земных колебательных процессов имеет колебательное и относительное состояние параметра влажности.
Кроме того, в устройстве впервые использована и реализована методика сопоставления анализа основных моделей-эталонов известных землетрясений, ядерных и простых взрывов с конкретными показателями, получаемыми на месте сбора данных. (56) Сейсморазведка. Справочник геофизика. Под ред. Гурвича И. М. М. : Недра, 1981, с. 151-152.
Приспособление для установки приборов в основании энергосооружений/Госстрой СССР, ЦНИИ строительных конструкций им. В. А. Кучеренко, 1979, лист 1 и 2 3507.00.000. СБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Установка для измерений угловой скорости ухода гиростабилизатора | 1968 |
|
SU1839857A1 |
| СТАБИЛИЗИРОВАННОЕ ТЕПЛОВИЗИОННОЕ УСТРОЙСТВО НАВЕДЕНИЯ | 1995 |
|
RU2099750C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ СИГНАЛОВ ПЕЛЕНГОВАНИЯ ОБЪЕКТА ВИЗИРОВАНИЯ ИНЕРЦИАЛЬНОГО И РАДИОЛОКАЦИОННОГО ДИСКРИМИНАТОРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488137C2 |
| КУРСОВЕРТИКАЛЬ | 1994 |
|
RU2087865C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| Оптико-электронный прибор целеуказания | 2024 |
|
RU2840051C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2161109C1 |
Использование: для измерения параметров абсолютной вибрации. Сущность изобретения: устройство содержит четыре измерительных модуля, каждый из которых состоит из мембраны, на верхнем основании которой с четырех сторон установлены консольные подвески, на концах которых закреплены датчики вибраций. Кроме того, устройство содержит блок регистрации, состоящий из четырех модулей анализатора, и блок определения координат и электронный модуль. 2 з. п. ф-лы, 1 ил.
 -образными с убывающим по логарифмическому закону профилем, причем под верхним изгибом профиля подвески установлены элементы жесткости в виде валика из цветного металла, в центральной части которого выполнено винтовое отверстие, а в верхнем основании подвески выполнена прорезь для установки регулирующего элемента.
-образными с убывающим по логарифмическому закону профилем, причем под верхним изгибом профиля подвески установлены элементы жесткости в виде валика из цветного металла, в центральной части которого выполнено винтовое отверстие, а в верхнем основании подвески выполнена прорезь для установки регулирующего элемента.
