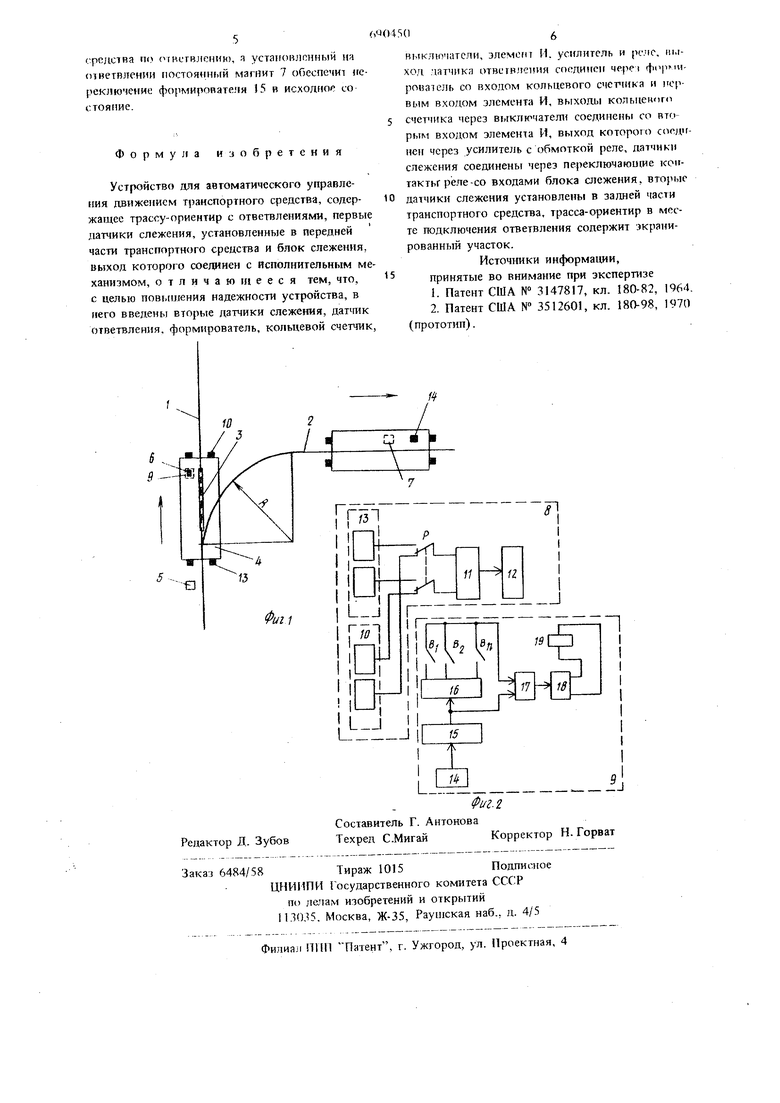
ключает соответствутощнй участок трассы. Минуя узловой пункт, транспортное средство подает сигнал на подготовку переключающего блока к Приёму следующего транспортного средства. Недостатком известного устройства является сложность блока считывания сигнала и передачи его переключающему блоку, установленному на трассе, что уменьшает его надежность. Цель изобретения - повышение надежности работы устройства. f Поставленная цель достигается тем, что в устройство введены вторые датчики слежения, датчик ответвления, формирователь, кольцевой счетчик, выключатели, элемент И, усилитель и реле, выход датчика ответвления соединен через формирователь со входом кольцевого счетчика и первым входом элемента И, выходы кольцевого счетчика через выключатели соединены со вторым входом элемента И, выход которого соединен через усилитель с обмоткой реле, датчики слежения соединены через переключающие контакты реле со входами блока слежения, вторые датчики слежения установлены в задней части транспортного средства, трассаориентир в месте подключения ответвления содержит экранированный участок. На фиг. 1 изображена схема узлового пункта трассы; на фиг. 2 - блок-схема устройства для управления движением транспортного средства Узловой пункт трассы-ориентара включает прямой участок провода 1 и ответвление, выпол ненное проводом 2. Трасса-ориентир с ответвле нием : содержит; экранированный участок, экра;н 3 которого выполнен в виде металлической тру бы и служит для гашения излучения провода. Трасса-ориентир может бьпь выполнена из пассивной металлической фольги. Выполнение узловых пунктов при этом может быть таким же а вместо экранирования делается разрыв полосы фольги. Радиус выполнения ответвления устайайЛивается в соответствии с техническими данными транспортного средства 4. Трасса в узловом пункте содержит постоян ный магнит 5,установленный перед ответвление и служащий для подачи команды на борт транспортного средства о входе на узловой пункт, постоянный магнит 6, установленный в конЦе экрана 3, и постоянный магнит 7 в конце отве вления. Транспортное средство содержит устройство слежения 8 и блок адресования ответвлений 9. Устройство слежения 8 включает датчик слежения 10, установленный в передней части транспортного средства и подключенный к устройству слеже1тя 8 посредством коммутирующего устройства - контакты реле Р. Блок сл 4 женин 11 обеспечиваег включение исполнительного механизма (серводвигателя) 12 для осуществления коррекции движегшя. В защгей части транспортного средства установлен датчик слежения 13. Длина экрана 3 не должна превышать расстояние -между датчиками слежения 10 и 13. Блок адресования ответвлений 9 содержит датчик ответвлений 14, формирователь 15, кольцевой счетчик 16, выключатели В1-В , элемент И 17, усилитель 18, нагрузкой которого является реле 19. Устройство для автоматического управления движением транспортного средства работает следующим образом. Уложенные по трассе провода запитываются Высокочастотным стационарным источником-генератором. При движении транспортного средства по трассе датчик слежения 10 реагирует на излучение, создаваемое проводом н создает на выходе сигнал, пропорциональный величине отклонения. Результирующий сигнал подается через контакты реле 19 на блок слежения 11, где он обрабатывается и усиливается для подачи на серводвигатель 12 управляемого колёса, осуществляя коррекцию движения. До начала движения транспортного средства кольцевой счетчик 16 устанавливается в нулевое положение. При движении транспортного средства с поступлением первого счнтьюающего сигнала от магнита 5 (при нрохождении первого узлового пункта) на первой шине кольцевого счетчика 16 устанавливается единичный сигнал, с приходом второго считьгеающего сигнала устанавливается единичный сигнал ка второй тине и т.д. При прохождении транспортным средством узлового .пункта без выполнения ответвления, на входе элемента И 17 появятся два единичных сигнала разных по времени действия. От кольцевого счетчика 16 будет поступать постоянный сигнал, а от формирователя 15 - короткий сигнал, определяющий время действия сигнала на выходе элемента И 17. Этот сигнал, пройдя через усилитель 18, обеспечивает, срабатывание реле 19, которое подключит датчик слежения 13 к блоку слежения 11. Далее направление движения транспортного средства будет определяться датчиком слежения 10 по трассе, обозначенной проводом 1. При необходимости выполнения ответвления в п-ом узловом пункте выключатель Bri ставится в положение выключено. Это гфиводит к тому, что на выходе элемента И 17 при проходе узлового пункта сигнал не появляется, а, следовательно, и не происходит переключения датчиков слежения 10 и 13. В результате датчик слежения 10 обеспечит движение транспортного
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для управления транспортными средствами | 1977 |
|
SU682937A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для адресования транспортного средства с электроприводом | 1987 |
|
SU1431988A2 |
| Система управления автоматического напольного электротранспорта | 1985 |
|
SU1274102A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ; ТРАНСПОРТНЬГХ СРЕДСТВ:.. . .Л..,. /. ;Е^г!5ЛИО7ьКА | 1971 |
|
SU302295A1 |
| Устройство для адресования транспортного средства с электроприводом | 1983 |
|
SU1184767A1 |
| Устройство для управления напольными транспортными установками | 1974 |
|
SU503776A1 |
