Изобретение относится к области космического машиностроения, в частности к магнитным средствам управления параметрами движением вокруг центра масс космического аппарата (КА) научно-технологического назначения.
Известно устройство определения углового положения летательного аппарата по магнитному полю Земли (Коваленко А.П. Магнитные системы управления космическими летательными аппаратами. М.: Машиностроение, 1975, с. 124-160), содержащее блок магнитометров, блок вычисления углов курса и тангенса, блоки определения долготы, широты и высоты, вычислитель составляющих вектора индукции магнитного поля Земли, первый, второй и третий входы которого связаны с выходами блоков определения долготы, широты и высоты, а также синхронизатор.
Недостатками данного устройства является его невысокая точность.
В качестве прототипа выбрано устройство (патент РФ №163618, Электромагнитное устройство ориентации космического аппарата / Чернышев А.Н., Терентьев В.В., Фирсюк C.O., МПК B64G 1/32, опубликованный 27.07.16), содержащее блок управления и контроля и магнитную катушку, конструктивно связанную с корпусом аппарата и создающую магнитный момент при взаимодействии с МПЗ, когда электрический ток протекает по виткам катушки.
Недостатками такого устройства являются:
- отсутствие в составе устройства блоков для определения ориентации аппарата до, во время и после подачи напряжения на магнитные катушки, т.к. датчик фиксации электромагнитного поля, установленный на магнитную катушку устройства предназначены только для контроля работоспособности магнитной катушки;
- для повышения мощности электромагнитного устройства ориентации необходимо устанавливать дополнительные элементы катушки: дополнительные обмотки, силовые реле и датчики тока, что ведет к увеличению массы и габаритных размеров устройства;
- невысокая точность управления, особенно в зоне прохождения геомагнитных полюсов;
- отсутствие возможности перепрограммирования и настройки алгоритмов управления, реализованных в устройстве.
Техническим результатом является расширение функциональных задач устройства, увеличение точности измерений, повышение эффективности работы магнитных средств управления.
Технический результат достигается за счет того, что дополнительно введены блок информационного обмена с обеспечивающими системами КА, блок контроля электропитания, блок управления электромагнитами, блок вычислителя, блок расширителя портов обмена информацией, два трехкомпонентных магнитометра для измерения состояния магнитного поля, три электромагнита, блок солнечных датчиков.
Поставленная цель достигается путем использования в составе устройства двух датчиков-магнитометров 3, блока датчиков солнца 2, программно-управляемых регуляторов тока (вместо силовых реле), которые образуют блок управления электромагнитами 4, кроме того, микроконтроллер из состава прототипа заменяется на блок вычислителя и блок информационного обмена с обеспечивающими системами КА 8, что, позволит обеспечивать настройку и перепрограммирование бортовых алгоритмов управления ориентацией, а в состав блока управления и контроля 9 дополнительно вводятся блок расширителя портов 5 для подключения датчиков-магнитометров 3, блока солнечных датчиков 2 и блока управления электромагнитами 4. Причем два датчика магнитометра 3 устанавливают на КА так, чтобы оси одного датчика не были параллельны осям другого. Т.о. парируется ситуация, когда в процессе полета при совпадении вектора напряженности МПЗ с одной из осей датчика, он будет показывать свой собственный «шум», другой датчик сможет корректно измерять составляющие МПЗ, т.к. его оси не будут параллельны вектору напряженности МПЗ. Программно-управляемые регуляторы тока расширяют функциональные возможности т.к. позволяют регулировать величину тока, подаваемую на магнитные катушки, обеспечивая более эффективное и «гибкое» управления режимами ориентации.
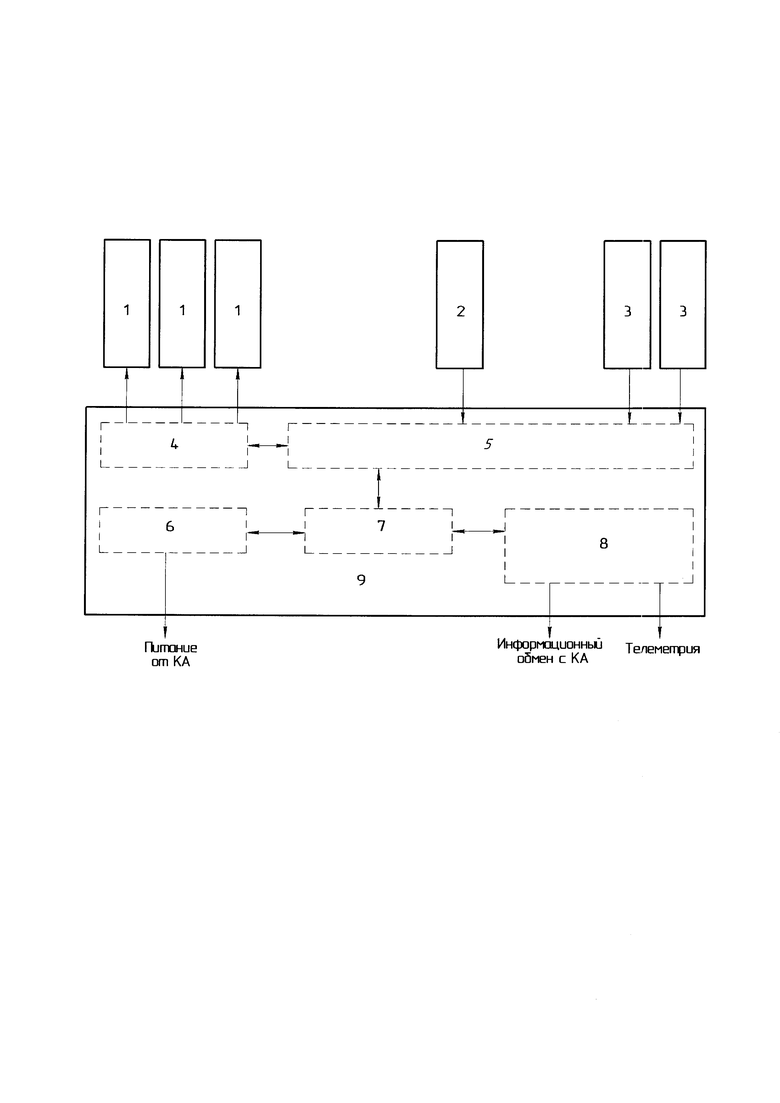
Сущность изобретения поясняется чертежом, где представлена функциональная схема устройства.
Устройство содержит три электромагнита 1, блок солнечных датчиков 2, два датчика-магнитометра 3, блок управления и контроля 9, в состав которого входят блок управления электромагнитами 4, блок расширителя портов 5, блок электропитания 6, блок вычислителя 7, блок информационного обмена с обеспечивающими системами КА 8, три электромагнита соединены входами блока управления электромагнитами, который вместе с блоком солнечных датчиков и двумя датчиками-магнитометрами соединены со входами блока расширителя портов 5, блок расширителя портов 5 соединен со входом блока вычислителя 7, блок вычислителя 7 соединен со входами блока информационного обмена с обеспечивающими системами КА 8 и блока электропитания 6.
Устройство работает следующим образом.
В датчиках-магнитометрах 3 производится измерение проекции векторов индукции магнитного поля Земли Вх, Ву, Bz и измерение угла между оптической осью солнечных датчиков 2 и направлением на центр Солнца. От обеспечивающих систем космического аппарата через блок информационного обмена с обеспечивающими системами 8 в блок вычислителя 7 поступает навигационная информация с параметрами движения центра масс (ПДЦМ) космического аппарата. На основании полученных данных ПДЦМ рассчитывается вектор геомагнитной индукции по модели геомагнитного поля, реализованной на средствах вычислителя. Из совокупности полученных данных формируются сигналы для системы электромагнитов 1 для управления ориентацией КА. Результаты работы устройства передаются на наземные пункты приема по каналам телеметрии КА. Полученная информация анализируется и, при необходимости, составляется массив данных, корректирующий программу работы устройства. Составленный массив передается на борт КА и транслируется в устройство для коррекции бортового программного обеспечения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы | 2022 |
|
RU2797430C1 |
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ПОМЕХИ НА КОСМИЧЕСКОМ АППАРАТЕ В ПОЛЕТЕ | 2009 |
|
RU2408507C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2408508C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| Способ сброса кинетического момента инерционных исполнительных органов космического аппарата и устройство для реализации способа | 2015 |
|
RU2625687C2 |
| БОРТОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2008 |
|
RU2368872C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| Способ ориентации околоземного орбитального космического аппарата | 2021 |
|
RU2779658C1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ИНЕРЦИОННЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070148C1 |
Изобретение относится к магнитным средствам управления параметрами движением вокруг центра масс космического аппарата (КА) научно-технологического назначения, особенностью которого является обеспечение ориентированного режима полета с невысокими требованиями к точности угловой ориентации. Дополнительно введены блок информационного обмена с обеспечивающими системами КА, блок контроля электропитания, блок управления электромагнитами, блок вычислителя, блок расширителя портов обмена информацией, два трехкомпонентных магнитометра для измерения состояния магнитного поля, три электромагнита, блок солнечных датчиков. Блоки связи с обеспечивающими системами КА, контроля электропитания, управления электромагнитами, вычислителя, расширителя портов обмена информацией конструктивно объединены в один моноблок. Блок управления и контроля имеет интерфейсы сопряжения с обеспечивающими системами КА по каналам питания, информационного обмена для получения команд управления, коррекции и настройки программного обеспечения блока вычислителя, телеметрии для контроля работоспособности устройства. Увеличивается точность измерений, повышается эффективность работы магнитных средств управления. 1 ил.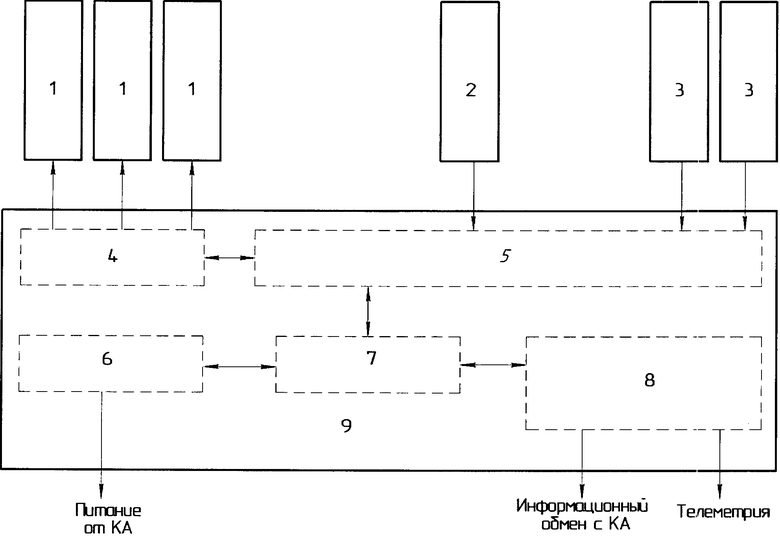
Устройство контроля параметров углового движения космического аппарата (КА), содержащее блок управления и контроля и магнитную катушку, конструктивно связанную с корпусом аппарата и создающую магнитный момент при взаимодействии с МПЗ, когда электрический ток протекает по виткам катушки, отличающееся тем, что дополнительно введены блок информационного обмена с обеспечивающими системами КА, блок контроля электропитания, блок управления электромагнитами, блок вычислителя, блок расширителя портов обмена информацией, два трехкомпонентных магнитометра для измерения состояния магнитного поля, три электромагнита, блок солнечных датчиков, при этом блоки связи с обеспечивающими системами КА, контроля электропитания, управления электромагнитами, вычислителя, расширителя портов обмена информацией конструктивно объединены в один моноблок, электромагниты расположены ортогонально относительно друг друга, магнитометры расположены на космическом аппарате в местах с минимальной напряженностью электромагнитного поля на наибольшем расстоянии от намагниченных элементов конструкции космического аппарата, силовых кабелей и приборов с высоким энергопотреблением, датчики солнца установлены на разные стороны КА, по одному на каждую грань КА, блок управления и контроля имеет интерфейсы сопряжения с обеспечивающими системами КА по каналам питания, информационного обмена для получения команд управления, коррекции и настройки программного обеспечения блока вычислителя, телеметрии для контроля работоспособности устройства.
| 0 |
|
SU163618A1 | |
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
| Хирургический внутрикостный фиксатор | 1961 |
|
SU145978A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ПОМЕХИ НА КОСМИЧЕСКОМ АППАРАТЕ В ПОЛЕТЕ | 2009 |
|
RU2408507C1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ДВИГАТЕЛЕЙ-МАХОВИКОВ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2568827C1 |

