/////////////Л/777/////// ////777777
Изобретение относится к робототехнике и предназначено для использования в конструкциях промышленных роботов и манипуляторов.
Целью изобретения является повыше- ние эксплуатационной надежности и расширение технологических возможностей.
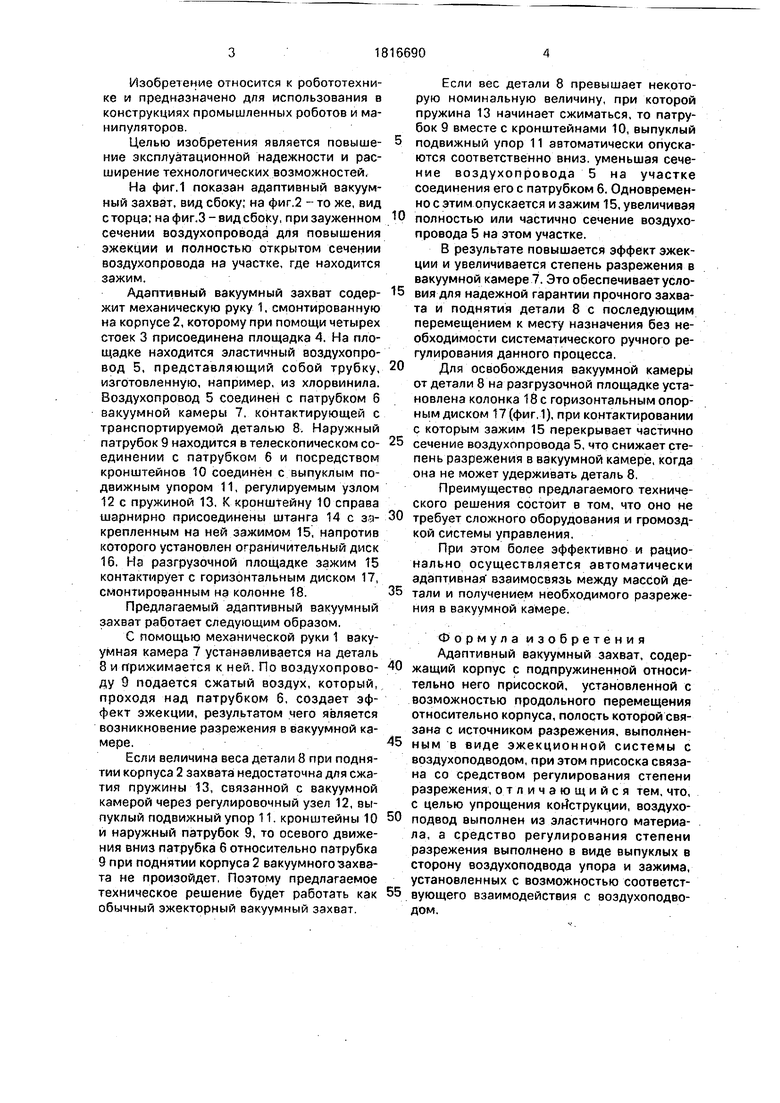
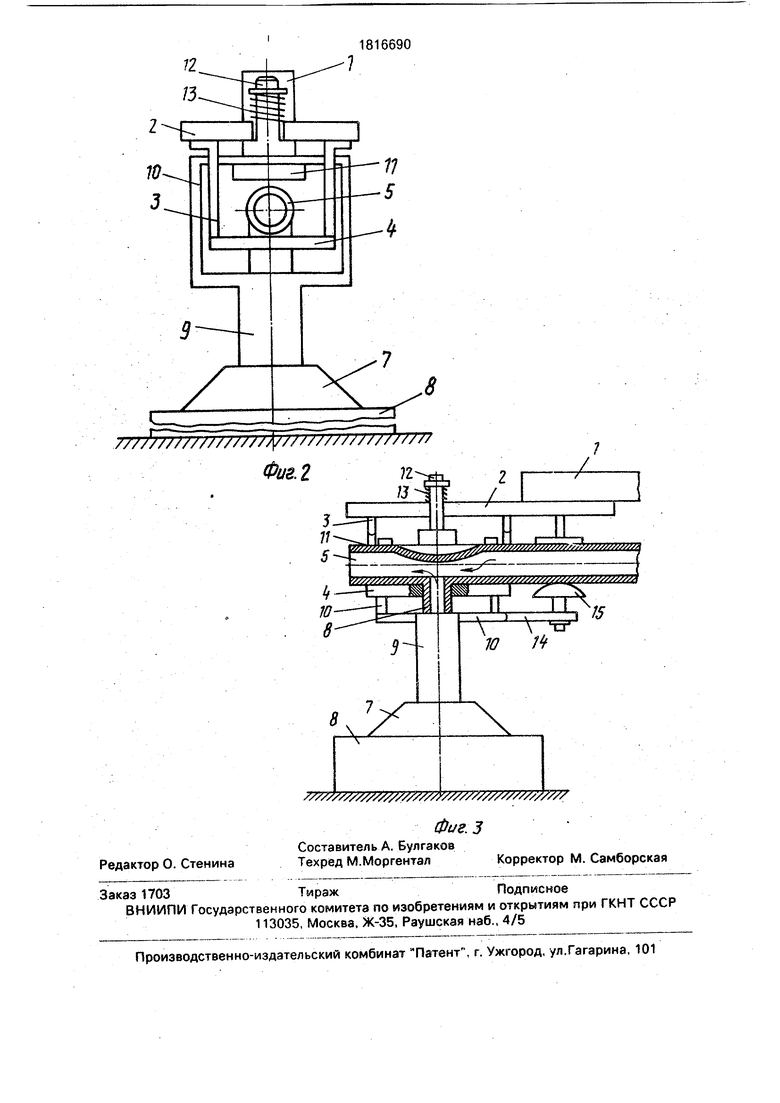
На фиг.1 показан адаптивный вакуумный захват, вид сбоку; на фиг.2 - то же, вид с торца; нафиг.З-видсбоКу, при зауженном сечении воздухопровода для повышения эжекции и полностью открытом сечении воздухопровода на участке, где находится зажим.
Адаптивный вакуумный захват содер- жит механическую руку 1, смонтированную на корпусе 2, которому при помощи четырех стоек 3 присоединена площадка 4. На площадке находится эластичный воздухопровод 5, представляющий собой трубку, изготовленную, например, из хлорвинила. Воздухопровод 5 соединен с патрубком 6 вакуумной камеры 7, контактирующей с транспортируемой деталью 8. Наружный патрубок 9 находится в телескопическом со- единении с патрубком 6 и посредством кронштейнов 10 соединён с выпуклым подвижным упором 11, регулируемым узлом 12 с пружиной 13, К кронштейну 10 справа шарнирно присоединены штанга 14 с за- крепленным на ней зажимом 15, напротив которого установлен ограничительный диск 16. Из разгрузочной площадке зажим 15 контактирует с горизонтальным диском 17, смонтированным на колонне 18
Предлагаемый адаптивный вакуумный захват работает следующим образом.
С помощью механической руки 1 вакуумная камера 7 устанавливается на деталь
8 и прижимается к ней. По воздухопрово- ду 9 подается сжатый воздух, который, проходя над патрубком 6, создает эффект эжекции, результатом чего является возникновение разрежения в вакуумной камере.
Если величина веса детали 8 при поднятии корпуса 2 захвата недостаточна для сжатия пружины 13, связанной с вакуумной камерой через регулировочный узел 12, выпуклый подвижный упор 11. кронштейны 10 и наружный патрубок 9, то осевого движения вниз патрубка 6 относительно патрубка
9 при поднятии корпуса 2 вакуумного захвата не произойдет, Поэтому предлагаемое техническое решение будет работать как обычный эжекторный вакуумный захват.
Если вес детали 8 превышает некоторую номинальную величину, при которой пружина 13 начинает сжиматься, то патрубок 9 вместе с кронштейнами 10, выпуклый подвижный упор 11 автоматически опускаются соответственно вниз, уменьшая сечение воздухопровода 5 на участке соединения его с патрубком 6. Одновременно с этим опускается и зажим 15, увеличивая полностью или частично сечение воздухопровода 5 на этом участке.
В результате повышается эффект эжекции и увеличивается степень разрежения в вакуумной камере 7. Это обеспечивает условия для надежной гарантии прочного захвата и поднятия детали 8 с последующим перемещением к месту назначения без необходимости систематического ручного регулирования данного процесса.
Для освобождения вакуумной камеры от детали 8 на разгрузочной площадке установлена колонка 18с горизонтальным опорным диском 17 (фиг.1), при контактировании с которым зажим 15 перекрывает частично сечение воздухопровода 5, что снижает степень разрежения в вакуумной камере, когда она не может удерживать деталь 8.
Преимущество предлагаемого технического решения состоит в том, что оно не требует сложного оборудования и громоздкой системы управления.
При этом более эффективно и рационально осуществляется автоматически адаптивная взаимосвязь между массой детали и получением необходимого разрежения в вакуумной камере.
Формула изобретения Адаптивный вакуумный захват, содержащий корпус с подпружиненной относительно него присоской, установленной с возможностью продольного перемещения относительно корпуса, полость которой связана с источником разрежения, выполненным в виде эжекционной системы с воздухоподводом, при этом присоска связана со средством регулирования степени разрежения, отличающийся тем, что, с целью упрощения конструкции, воздухо- подвод выполнен из эластичного материала, а средство регулирования степени разрежения выполнено в виде выпуклых в сторону еоздухоподвода упора и зажима, установленных с возможностью соответствующего взаимодействия с воздухоподводом.
Фиг. 2
п
И Hi
.L
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1989 |
|
SU1689067A1 |
| Схват робота | 1987 |
|
SU1502299A1 |
| Головка манипулятора | 1980 |
|
SU1041287A1 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Вакуумный захват | 1988 |
|
SU1646859A1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
| Вакуумный схват | 1980 |
|
SU891429A1 |
| Устройство для нанесения на наружную поверхность трубы полимерной рукавной оболочки | 1988 |
|
SU1636244A1 |
Использование: машиностроение, в захватных органах промышленных роботов. Сущность изобретения: захват содержит корпус 2 с подпружиненной относительно него присоской 7. Полость присоски 7 сообщена с источником разрежения, выполненным в виде зжекционной системы с воздухоподводом 5 из эластичного материала, Присоска 7 связана со средством регулирования степени разрежения, которое выполнено в виде выпуклых в сторону воз- духоподвода 5 упора 11 и зажима 15. При этом упор 11 и зажим 15 установлены с возможностью соответствующего взаимодействия с воздухоподводом 5. В случае захвата детали 8. вес которой превышает номинальную величину, пружина 13 сжимается, а упор 11 и зажим 15 опускаются. При этом сечение воздухоподвода 5 на участке его соединения с патрубком 6 уменьшается, а на участке, противоположном зажиму 15, увеличивается. В результате этого повышается эффект эжёкции и увеличивается степень разрежения в полости присоски 7.3 ил. (Л С
ж
LJ
sJsss)fs/№}&sjj& J2J/}r/ JJ/77j
Ж
т-
1ГЛ
з
15
,тг Я7 /
| Вакуумный захват | 1989 |
|
SU1689067A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
