Изобретение относится к робототехнике и предназначено для использования в конструкциях промыпшенных роботов и манипуляторов.
Цель изобретения - повышение надежности работы адаптивного захватного устройства.
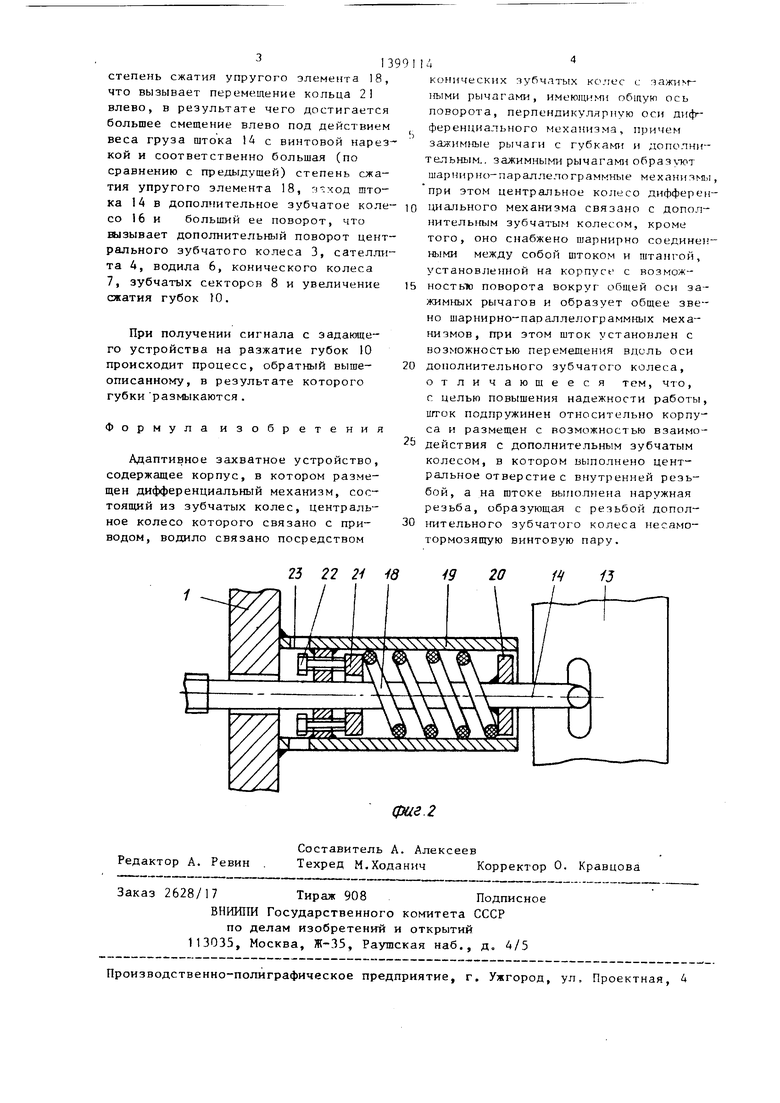
На фиг. 1 изображено адаптивное захватное устройство, общий вид; на фиг, 2 - узел крепления штока к корпусу.
Адаптивное захватное устройство содержит корпус 1, привод перемещения губок 2 с центральным зубчатым колесом 3, связанным через сателлит 4 и центральное зубчатое колесо 5 с водилом 6, выполненным в сопряжении с коническим зубчатым колесом 7, которое через зубчатые секторы 8 и рычажный механизм 9 связано с губками 10 захватного устройства. Звенья рычажного механизма 9 через оси 11, на- ходящиеся в дугообразных прорезях 12, выполненных в рычаге 13, соедлне- ны со штоком 4, имеющим наруж гую резьбу. В месте сопряжения штока 14 с рычагом 13 предусмотрена вертикаль- ная прорезь 15. Горизонтальное перемещение штока 14 с резьбой влево дает вертикальной прорези 15 при соответствующем перемещении входить в зацепление с дополнительным зубчатым колесом 16, которое в свою очередь связано с центральным зубча- тым колесом 3. Ось 17 рычажного механизма 9 жестко связана с корпусом 1, а рычаг 13 размещен на оси 17 с возможностью качания относительно нее. Шток 14 выполнен подпружиненным упругим элементом 18, находящимся во втулке 19, укрепленной на корпусе 1. На штоке 14 неподвижно насажена шайба 20. Для возможности первоначального сжатия - растяжения упругого эле- мента 18 предусмотрено кольцо 21, перемещающееся посредством вращения упорных болтов 22 через прорези 23 во Втулке 19,
Адаптивное захватное устройство работает следующим образом.
При получении сигнала с задакнцего устройства привод перемещения губок 2 передает вращение через.центрально зубчатое колесо 3, сателлит 4 и центральное зубчатое колесо 5 на водило 6, которое, вращая коническое зубчатое колесо 7 и находящиеся с ним зубчатые секторы 8, через рычажный меха
ю
15 20 25 305 40д5
гл
142
низм 9 перемещает губки 10 захватного устройства, одновременно происходит перемещение по часовой стрелке рычага 13 вокруг оси 17, обусловленное возникновением момента неуравновешенности от веса груза относительно оси 17, Если величина груза меньше или равна некоторому номинальному значению, то перемещения щтока 14 с винтовой нарезкой по вертикальной прорези 15 будет недостаточно для образования зацепления с дополнительным зубчатым колесом 16, которое им«Л5т внутреннюю резьбу, В этом случае вращение дополнительного зубчатого колеса 16, соединенного с центральным зубчатым колесом 3, будет происходить вхолостую и зажатие объекта манипулирования произойдет без участия адаптационной части устройства. Если же величина груза в захватном устройстве превышает номинальную, то вследствие более значительной (по сравнению с предыдущим случаем) величины момента неуравновещенности от веса груза, а следовательно, и большего перемещения 14 с винтовой нарезкой влево, вертикальная прорезь 15 войдет в зацепление с дополнительным зубчатым колесом 16, в результате чего ее поступательное перемещение преобразуется во вращательное движение дополнительного зубчатого колеса 16, а центральное зубчатое колесо 3 провернется на пропорциональное перемещению штока 14 значение угла. Далее движение передается звеньям дифференциального механизма и (аналогично ранее рассмотренному случаю), в результате чего обеспечивается допо;шитель- ное сжатие губок 10, Чем больше разница между весом груза в захватном устройстве и весом номинального груза, тем больше ход штока 14 влево, поворот звеньев устройства и степень сжатия губок схвата. Под номинальным здесь понимается вес объекта, с которым данный промышленный робот или манипулятор работает чаще всего. Величину веса груза, начиная с которого будет происходить дополнительное сжатие губок 10 захватного устройства, регулируют посредством изменения степени сжатия упругого элемента 18, Для повышения чувствительности захватного устройства вращением через прорези 23 гЬловки упорных болтов 22 против часовой стрелки уменьшают
23 22 2i 8
9 20
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1255425A1 |
| Адаптивный захватный модуль промышленного робота | 1989 |
|
SU1689063A1 |
| Захватное устройство | 1989 |
|
SU1660955A1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| Захватное устройство манипулятора | 1985 |
|
SU1306711A1 |
| АДАПТИВНЫЙ ЗАХВАТ РУКИ МАНИПУЛЯТОРА | 1991 |
|
RU2022778C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Адаптивное электромеханическое захватное устройство для промышленных и коллаборативных роботов | 2024 |
|
RU2836085C1 |
| Адаптивное захватное устройство | 1986 |
|
SU1454689A1 |
| Захватное устройство | 1986 |
|
SU1473943A1 |
Изобретение относится к робототехнике и предназначено для использования в конструкциях промышленных роботов и манипуляторов. Целью изобретения является повышение надежносх лС 4. / i ти работы. Привод перемещения губок 2 передает вращение через центральное зубчатое колесо 3, сателлит 4, центральное зубчатое колесо 5 на водило 6, которое, вращая коническое зубчатое колесо 7 и находящиеся с ним в зацеплении зубчатые секторы 8 через рычажный механизм 9, перемещает губки захватного устройства Ю. Если величина груза превыщает номинальную величину, шток 14 перемещается и входит в зацепление своей резьбой с резьбой дополнительного зубчатого колеса 16,которое вызьшает перемещение звеньев дифференциального механизма, обеспечивая дополнительное сжатие губок. 2 ил. (Л 00 ;о со N if; 
| Захватное устройство | 1984 |
|
SU1255425A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| I | |||
