У/////77/777777 7У7////////77/У//
фиг.1
Изобретение относится к механическим захватам для перемещения грузов и может быть использовано в робототехнике.
Целью изобретения является упрощение конструкции захватного устройства.
На фиг. 1 показано захватное устройство, общий вид. когда оно находится над захватываемым грузом (для публикации в бюллетене); на фиг. 2 - то же, в момент, когда захватываемый груз отклонен, т.е. один край его основания приподнят над полом и под основание подведена отсекающая пластина; на фиг. 3 - то же, вид сверху.
Захватное устройство содержит корпус 1. в верхней части которого изнутри находятся два ступенчато размещенных ролика 2 на регулируемом кронштейне 3. Снаружи, корпуса на оси А установлена шарнирная рамка 5с подсекающей пластиной 6. Сверху к шарнирной рамке 5 шарнирно подсоединен шток 7 гидроцилиндра 8, который смонтирован на механической руке 9. У основания корпуса закреплен опорный выступ 10, а внутри корпуса находятся перемещаемый груз 11.
Устройство работает следующим образом.
Механической рукой 9 корпус 1 устанавливается над перемещаемым грузом 11 и затем опускается до соприкосновения основания корпуса с горизонтальной поверхностью, на которой расположен-перемещаемый груз 11. В результате этого сначала посредством ролика 2 нижнего и вслед за ним ролика 2 верхнего, груз 11 отклоняется
верхним основанием вправо, а между левой стороной основания перемещаемого груза 11 и полом образуется зазор. После этого в цилиндр 8 подается энергетическая жидкцеть или воздух и выдвигаемый шток 7 по- ворачивает шарнирную раму 5 в вертикальное положение. Закрепленная снизу шарнирной рамкой 5 подсекающая пластина 6 продвигается под основание перемещаемого груза 11 (фиг. 2). Таким образом, перемещаемый груз оказывается надежно закреплен в корпусе и транспортируется по назначению.
Для освобождения перемещаемого гру5 за от захвата корпус 1 устанавливается на горизонтальную поверхность и шток 7 вдви-. гается в цилиндр, вследствие чего подсекающая пластина 5 выходит за пределы основания перемещаемого груза (фиг. 1).
0 После этого перемещаемый груз освобождается от захвата и корпус 1 можно направлять для захвата и перемещения очередного груза.
5 формула изобретения
Захватное устройство, содержащее корпус в виде стакана, в котором смонтирован механизм отрыва и клещевой захват с крюками, рычаги которого связаны с приводом,
0 отличающееся тем, что, с целью упрощения конструкции, механизм отрыва выполнен в виде двух ступенчато расположенных роликов, смонтированных на регулируемом кронштейне, а корпус снабжен
35 опорным выступом.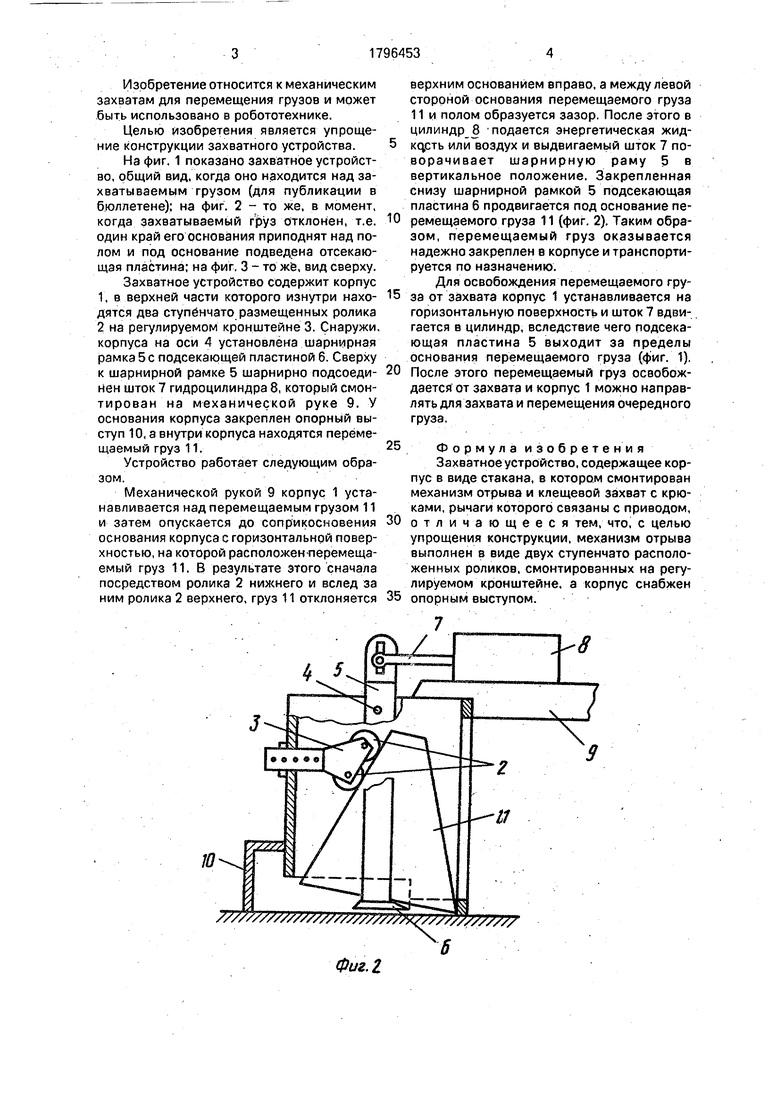
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство к погрузчику | 1978 |
|
SU749798A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022779C1 |
| Устройство для определения прочности сцепления кирпича с раствором | 1980 |
|
SU951118A1 |
| Устройство для отделения полосового материала от стопы | 1985 |
|
SU1378993A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| АДАПТИВНЫЙ ЗАХВАТ РУКИ МАНИПУЛЯТОРА | 1991 |
|
RU2022778C1 |
| Грузозахватное устройство | 1990 |
|
SU1740297A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Устройство для перегрузки конусов электронно-лучевых трубок с транспортера печи отжига | 1990 |
|
SU1839168A1 |

Использование: в робототехнике для захвата и перемещения грузов. Сущность изобретения: механическая рука 9 устанавливает корпус 1 над перемещаемым грузом 11, затем опускает его до соприкосновения основания корпуса с горизонтальной поверхностью. В это время в результате взаимодействия груза 11 с механизмом его отрыва от горизонтальной поверхности, выполненного в виде двух ступенчато расположенных роликов 2, смонтированных на регулируемом кронштейне, груз 11 отклоняется, а вы- двигаемый шток 7 поворачивает шарнирную рамку 5 с подсекающей пластиной 6 под основание груза 11. 3 ил.
/////;
Фиг.1
7Я ЗУ/77//77777// 6
Фиг.З
| Вакуумное захватное устройство | 1980 |
|
SU925836A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
