Изобретение относится к управлению тормозами машины и может быть использовано для ограничения скорости движения тракторов и автомобилей при перевозке грузов и предотвращения тяжелых последствий движения без водителя.
Известно устройство управления тормозами машины, предусматривающее утилизацию энергии выхлопных газов и избыточной движущей силы, накопление энергии в баллоне и аварийное торможение. Скорость движения определяется водителем и зависит от его квалификации и состояния местности. Отсутствие ограничения скорости при неровностях дороги, колебаниях машины, груза, сил сцепления вызывает потери ресурсов, порчу грузов. Это, а также случаи движения машины без водителя существенно снижают эффективность и безопасность работы, ресурс и сохранность грузов при перевозке.
Технический эффект достигается тем, что в качестве контрольного параметра используют деформацию подвески сиденья, скорость движения ограничивают торможением силой упругости сиденья и колебаниями машины и груза от изменения состояния опорной поверхности, при отсутствии водителя на рабочем месте машину тормозят подвеской сиденья, при недопустимых колебаниях машины скорость ограничивают подвеской ходовой части, при торможении в первую очередь утилизируют энергию избыточной движущей силы и накапливают ее при снижении накопленной энергии ниже критического значения машину тормозят силой тяжести подрессоренной массы до остановки и удерживают.
Пневмокамера заслонки в выхлопной трубе соединена с линией управления тормозами прицепа, сиденье водителя соединено с органом управления, орган управления связан с рычагом оси ходовой части.
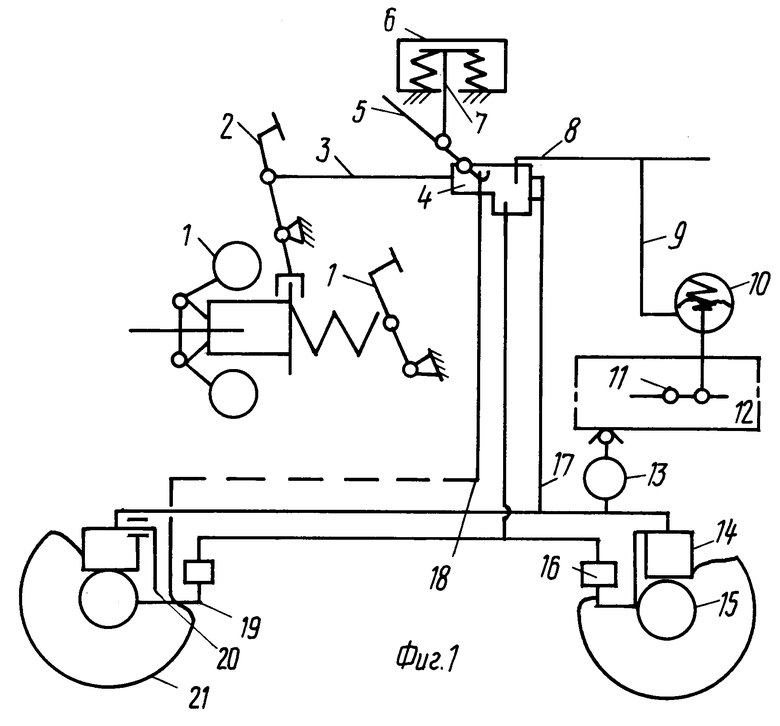
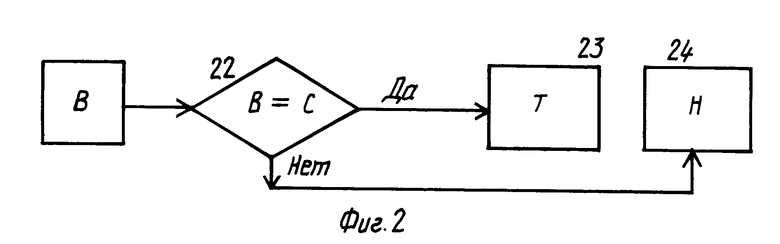
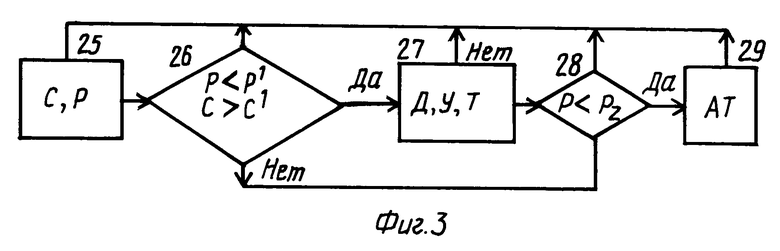
На фиг. 1 изображена схема устройства и системы управления тормозами машины с пневмоподвеской или иной подвеской; на фиг. 2 - блок-схема реализации способа контроля водителя В и управления по сигналу сидения об отсутствии водителя (В=0) на месте при торможении Т или нормальной работе Н; на фиг. 3 - блок-схема реализации способа контроля скорости С и давления Р в пневмосистеме, сравнения их с целевыми значениями С1 и Р1, а также с критическим значением Рк для управления двигателем Д, утилизатором У и тормозами Т или аварийного автоматического торможения АТ.
Способ управления тормозами машины (трактора, автомобиля, комбайна) реализуют системой и устройством, включающим регулятор 1 (фиг. 1) расхода топлива, связанный с педалью 2 и тягой 3 с тормозным краном 4, который рычагом 5 соединен с подрессоренной частью сиденья 6 посредством тяги 7 управления. Трубопроводы для рабочего материала (воздуха, газа, жидкости) в виде трубок 8 обслуживания тормозов прицепа соединены трубкой 9 с пневмокамерой (цилиндром) 10 управления заслонкой 11 в выхлопной трубе 12, от которой через обратный клапан и баллон 13 в пневмоподвеску 14 можно подать газы после пуска и в период торможения, утилизации энергии избыточной движущей силы и накопления энергии. Управление тормозами 15 колес можно осуществить камерой (цилиндром) 16 привода тормозов путем подачи материала из линии 17 подвесок при воздействии на органы управления, а также по сигналу посредством тяги 18 связи с рычагом ходовой части 19 или посредством рычага 20 подвески автоматического аварийного торможения колес 21 силой тяжести подрессоренной массы.
Сиденье (фиг. 2) может, если нет водителя (В=0), тормозить машину 23 натяжением тяги 7 упругой силой подвески или растормозить 24 при нормальной работе Н. Это допускает использование подвески в качестве ограничителя скорости, а деформацию подвески - в качестве контрольного параметра и сигнала для ограничения скорости. Алгоритм автоматического торможения при реализации способа человеком, регуляторами топлива и давления или спидометром включает контроль скорости С (фиг. 3), давления Р 25, сравнение 26 их значений с нормой С1, Р1, управление 27 двигателем Д, утилизатором У и тормозом Т, сравнение 28 с критическим значением давления Рк, аварийное автоматическое торможение АТ при нижекритическом давлении, т.е. при падении давления газов в подвеске ниже уровня возможного управления тормозами пневмоприводом. Нормальное давление пневмопривода (5-7, 7 МПа), критическое - ниже 4 МПа. Для других материалов значение может быть иное.
Отсутствие компрессора и отбора мощности допускает увеличение давления газов до верхнего предела и выпуск в атмосферу через предохранительный клапан баллона. В случае выброса газов и энергии работоспособность пневмотормоза и утилизатора не снижается, т.е. энергия теряется без затрат на износ тормозов. Но это указывает на необходимость снижения частоты торможения, использования энергии для обслуживания агрегатов. Камера (цилиндр) 10 имеет полости для пружины и газа и может пружиной закрыть заслонку 11 в выхлопной трубе 12 при падении давления воздуха и открыть при повышении, когда кран 4 соединяет линию 8, 9 с баллоном 13 и подвеской 14 через их линию 17. Тяга 18 может управлять краном по сигналу рычага 19 оси ходовой части. При падении давления в этой линии и невозможности управления тормозами рама опускается и рычагами 20 тормозятся колеса 21, а это может остановить машину и удержать в неподвижном состоянии. Газ можно очистить известными фильтрами и охладить. Выключение топлива при торможении снижает температуру и загрязнение газа. Сиденье 6 водителя соединено тягой 7 с органом управления 5. Возможно соединение иное, например, с педалью 2. Сила тяжести водителя может растормозить машину, а сила упругости затормозить при отсутствии водителя. Упругая сила подвески ходовой части также может тормозить машину при разгрузке колес от сил тяжести и ограничить скорость движения по неровной поверхности. Гибкость тяг 7 и 18 исключает движение при разгрузке подвесок сиденья и колес, делает возможным только нормальное управление. Подвески сиденья и ходовой части могут быть пневматическими, механическими (рессоры листовые и из витой пружины) гидравлическими, пневмогидравлическими, гидрогазовыми и т.д. Рабочий материал привода тормозов может быть в виде газа, жидкости или механических тяг с усилителем и без них, причем подвески из неметаллических упругих материалов (резины, пластических материалов и т.д.) не нарушают закономерной связи колебаний с допустимой скоростью движения по реальной неровной поверхности. Деформация подвески подтверждает наличие водителя на рабочем месте. Он может управлять в пределах его возможности, а новые связи ограничивают скорость. При любом управлении тормозами целесообразно энергию избыточной движущей силы утилизировать и накопить для обслуживания машины (регулирования давления в шинах, управления муфтами сцепления и переключения скоростей, управления стеклоочистителями, дверьми автобуса и т.д.) в первую очередь, а затем, если торможение недостаточно, можно использовать энергию для управления тормозами 15 колес 21 с потерей энергии на обслуживание и на трение тормозных поверхностей с потерей избыточной силы (ее энергии) и ресурса тормозов. При движении по неровной поверхности колебания снижают расход топлива и ограничивают скорость, обеспечивают чувствительность машины к условиям местности, облегчают работу. Педали регулятора расхода топлива 1 и тормоза 2 взаимосвязаны и могут взаимодействовать: выключать топливо при торможении, и педалью акселератора снизить и исключить торможение при трогании с места на подъеме. При движении без груза, установку автоводителя с иной программой управления связи тормозного крана с подвесками можно блокировать или использовать в качестве ограничителя скорости с учетом состояния местности.
Устройство системы управления тормозами машины работает следующим образом. Регулятор 1 топлива реагирует на изменение нагрузки и регулирует расход топлива. При падении нагрузки скорость возрастает, расход топлива снижается. При дальнейшем повышении скорости водитель посредством педали 2 и тяги 3 действует на кран 4 и тормозит машину, вначале выпустив воздух из трубок 8, 9 и камеры 10 и закрыв заслонку 11 выхлопной трубы. При этом энергия избыточной движущей силы в виде давления накапливается в баллоне 13 и подвеске 14, затем тормозит колеса тормозом 15, не прерывая пневмоторможение. При воздействии на педаль 2 или на рычаг 5 водителем или упругой силой сиденья 6 через тягу 7 при отсутствии водителя кран 4 аналогично повторяет управление тормозами вначале выпуском воздуха из трубок 8, 9 и камеры 10 пневматического торможения в режиме утилизации энергии избыточной силы и накопления в баллоне 13 и подвеске 14, затем тормозами 15 колес, подачей воздуха в камеры 16 из линии 17. При увеличении скорости движения по неровной поверхности и опасности для машины, человека и груза подвески 14 в момент разгрузки затягивают тягу 18, поворачивают рычаг 5 по часовой стрелке (в сторону торможения) и как сиденьем без водителя тормозит машину и реализует способ управления по схемам (фиг. 2, 3). Если нет водителя (В=0) 22, тормозят 23. Если он на месте, то управляет сам. В каждом случае контролируют скорость С и давление Р 25, сравнивают с нормальными значениями С1, Р1 и формируют сигнал управления двигателем Д, утилизатором У и тормозом Т или, если давление ниже критического Рк 28, то силой тяжести подрессоренной массы машину тормозят 29 АТ поворотом рычагов 19 вниз рычагами 20 из-за опускания рамы и падения давления в подвесках 14. При воздействии на регулятор 1 топлива посредством педали 2 и крана машина растормаживается, в трубки 8, 9 и камеру 10 подается воздух, и заслонка 11 открывается, камеры 16 отключаются от линии 17.
Технико-экономическая или иная эффективность. При использовании предложенного изобретения повышается безопасность, исключается движение без водителя, ограничивается скорость и порча грузов и машины, исключается буксование из-за отрыва колес от почвы при колебании рамы. Все это повышает эффективность и безопасность работы, ресурс и сохранность грузов.
Изобретение относится к управлению тормозами машины и может быть использовано для ограничения скорости и исключения движения без водителя. Сущность изобретения: в качестве контрольного параметра используют деформацию подвески и сиденья. Скорость движения ограничивают торможением силой упругости сиденья и колебаниями машины и груза от изменения состояния опорной поверхности. При отсутствии водителя на рабочем месте машину тормозят подвеской сиденья. При недопустимых колебаниях рамы машины скорость ограничивают подвеской ходовой части. При торможении в первую очередь утилизируют энергию избыточной движущей силы и накапливают ее. При снижении накопленной энергии ниже критического значения машину тормозят силой тяжести подрессоренной массы для остановки и удерживают в неподвижном состоянии. Камера пневмотормоза соединена с линией управления тормозами прицепа, сиденье водителя и подвеска ходовой части соединены с органом управления тормозного крана. При использовании системы исключается движение без водителя, ограничивается скорость движения с учетом состояния опорной поверхности. 3 ил.
УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗАМИ ТРАНСПОРТНОГО СРЕДСТВА С ПНЕВМАТИЧЕСКОЙ ПОДВЕСКОЙ, содержащее орган управления тормозами транспортного средства, связанный с краном управления тормозами, элементом управления топливоподачей, регулятором подачи топлива и пневмоцилиндром управления положения заслонки, размещенной в выхлопной трубе двигателя, пневмокамеры, штоки которых кинематически связаны с элементами управления колесными тормозами, баллон сжатого воздуха, отличающееся тем, что сиденье транспортного средства для водителя выполнено с упругой подвеской и связано тягой с краном управления тормозами для подачи рабочего агента в тормозные пневмокамеры при отсутствии водителя на сидении, пневмоцилиндр управления положением заслонки сообщен управляющей полостью с магистралями подвода рабочего агента к тормозным механизмам прицепа и с краном управления тормозами, баллон сообщен с выхлопной трубой и пневматическими элементами подвески, имеющими кран управления с камерой подачи агента из линии подвески, при этом ходовая часть выполнена с рычагами для подачи через кран рабочего агента в тормоза при опускании кузова и воздействии на указанные рычаги.
| Тормозная система автопоезда | 1981 |
|
SU962041A2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
