Изобретение относится к подъемно-транспортному оборудованию, в частности к конструкции подъемников для подъема автотранспорта.
Известна конструкция подъемника, содержащего стойки, направляющие подъемные механизмы в виде кареток с электромеханическими винтовыми приводами, на винтах которых смонтированы грузовые и страховочные гайки, нижний и верхний концевые выключатели на стойках, выключающие электромеханический винтовой привод при достижении кареткой крайних рабочих положений [1].
Подъемник является устройством, эксплуатируемым для обслуживания изделий больших габаритов и веса, поэтому одним из основных требований, предъявляемых к его конструкции, является требование безопасности.
В конструкции подъемника [1] безопасность эксплуатации обеспечивается контролем износа грузовой гайки посредством упоров, шарнирно смонтированных на страховых гайках, взаимодействующих с нижними концевыми выключателями. Эта конструкция дополнена в подъемнике [2] дополнительными нижними аварийными выключателями, взаимодействующими с дополнительными упорами при отказе нижних концевых выключателей.
Конструкции подъемника [1, 2] присущ ряд недостатков, делающих его эксплуатацию небезопасной. Прежде всего в данной конструкции не учтена возможность выхода из строя верхнего концевого выключателя, что в эксплуатации при отказе этого выключателя приводит к аварийной ситуации. Контроль износа грузовой гайки посредством упоров, взаимодействующих с нижним концевым [1] или нижним аварийным [2] выключателем недостаточен, так как не предусмотрено отключение электромеханического привода при срезе резьбы гайки в рабочем положении каретки, кроме крайнего нижнего. Наконец, при подъеме транспортного средства вследствие различных причин (разная нагрузка на каретки, разброс параметров электромеханических винтовых приводов, зависимость частоты вращения электродвигателей электромеханических винтовых приводов от нагрузки и т.п.) возможно нарушение горизонтального (или другого заданного) положение транспортного средства - так называемый несинхронный подъем.
Известен подъемник для транспортного средства, содержащий стойки с вертикальными направляющими, в которых установлены грузоподъемные каретки с площадками для транспортного средства, механизмы вертикального перемещения кареток, каждый из которых включает в себя размещенный вдоль соответствующей стойки и связанный с электроприводом винт с грузовой и страховочной гайками, с которыми соединена каретка этой стойки, и устройство управления перемещением кареток, включающее в себя блок задания программ микропоцессора, размещенные на каждой стойке сигнализаторы крайних положений соответствующей каретки и аварийные выключатели, а также приспособления преобразования вращения винтов механизмов вертикального перемещения кареток [3].
Недостатком данной конструкции является то, что в целом ряде ситуации, встречающихся при эксплуатации (при неверном захвате транспортного средства вильчатым захватом каретки, обломе вильчатого захвата каретки, смещении транспортного средства при подъеме, ошибке оператора в установке допустимого, часто требуемого при обслуживании, начального - наклонного положения транспортного средства) микропроцессорное управление, используя зависимые от скорости движения сигналы преобразователей, установленных в каретке, будет продолжать синхронизацию подъема кареток и предотвратить аварию не сможет. Кроме того, установка устройства преобразователя движения подъемного механизма в подвижной каретке и выполнение его как преобразователя частоты вращения винта электромеханического привода небезопасно, так как предполагает подвижную электрическую связь преобразователя с управлением, что делает возможным повреждение преобразователя при движении, снижение точности преобразования скорости подъема каретки, а следовательно, точности синхронизации подъема из-за износа винта электромеханического привода со временем.
Цель изобретения - повышение безопасности работы подъемника.
Эта цель достигается тем, что подъемник снабжен сигнальными устройствами положения транспортного средства на каретках, каждое приспособление преобразования вращения соответствующего винта содержит крыльчатку, соединенную с этим винтом в зоне ее верхней опоры, и размещенный с возможностью взаимодействия с лопастями крыльчатки щелевой индуктивный преобразователь, а устройство управления перемещением кареток снабжено подключенными к блоку задания программ регистрами опроса состоянии и его запоминания пpиспособлений преобразования вращения винтов всех стоек, сигнальных устройств положения транспортного средства на каретках всех стоек, сигнализаторов крайних положений этих кареток и кнопок включения электроприводов винтов стоек и регистром управления этими электроприводами.
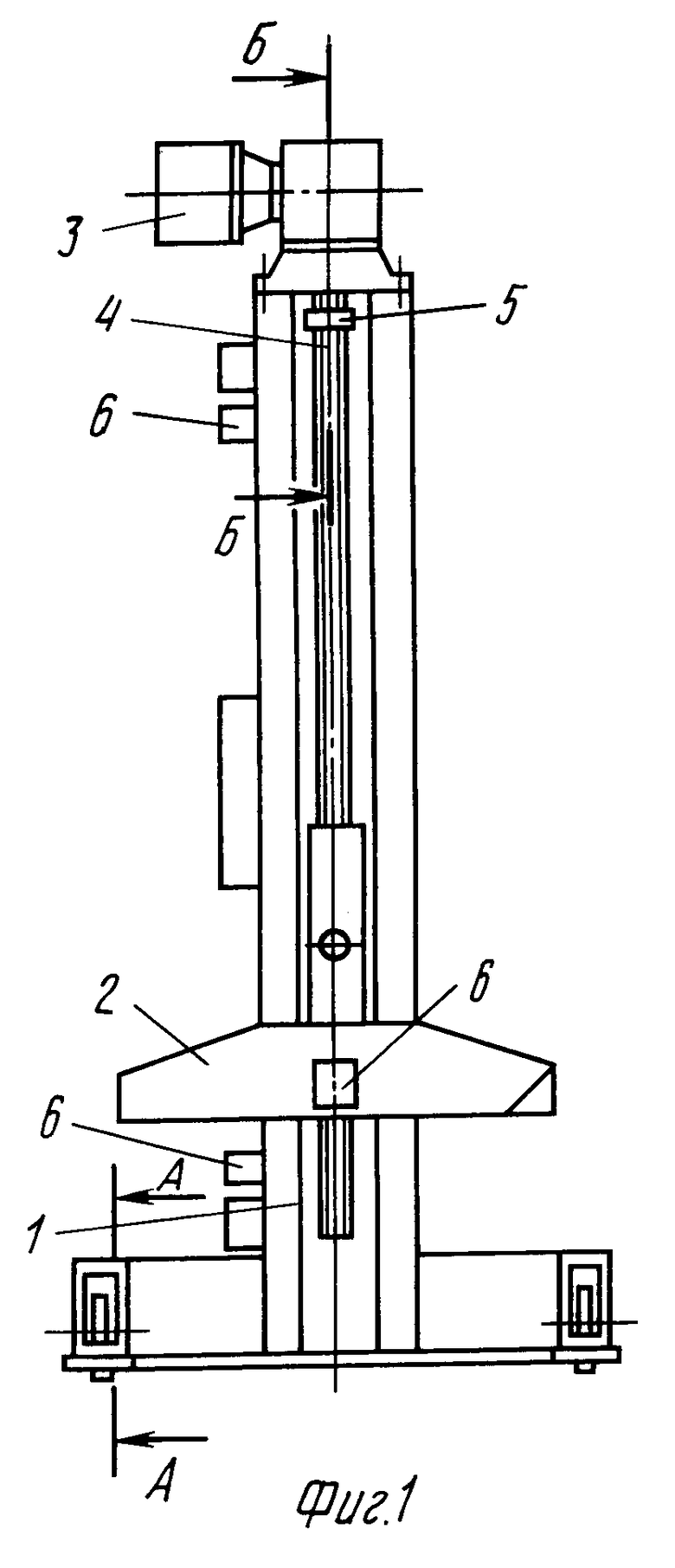
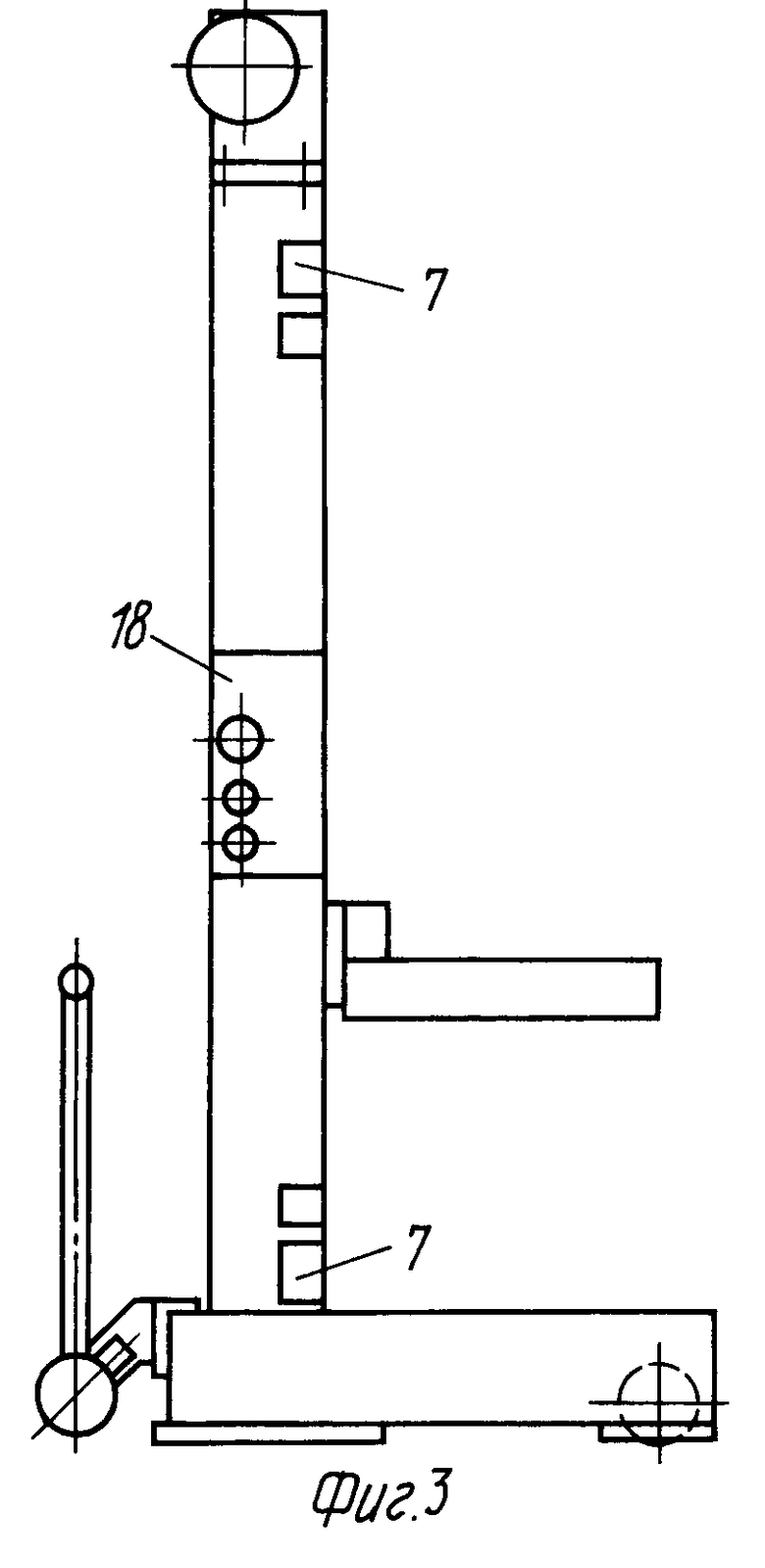
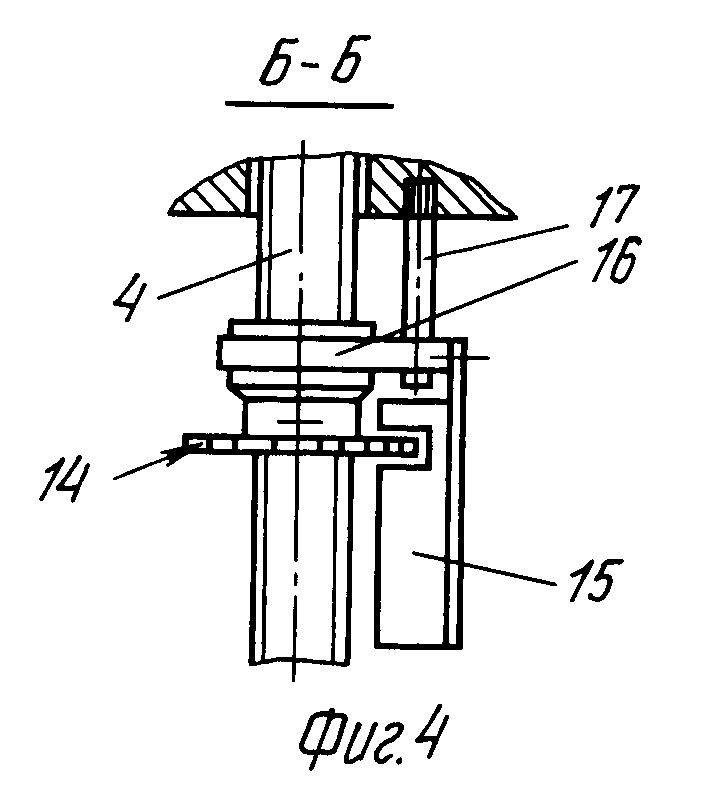
Изобретение иллюстрируется чертежами, где на фиг.1 показан общий вид одной из стоек подъемника (первый вариант); на фиг.2 - разрез А-А на фиг.1; на фиг.3 - подъемник, вид сбоку (первый вариант); на фиг.4 - разрез Б-Б на фиг. 1; на фиг.5 - общий вид одной из стоек подъемника (второй вариант); на фиг. 6 - вид по стрелке В на фиг.5; на фиг.7 - подъемник, вид сбоку (второй вариант) на фиг.8 - схема устройства управления.
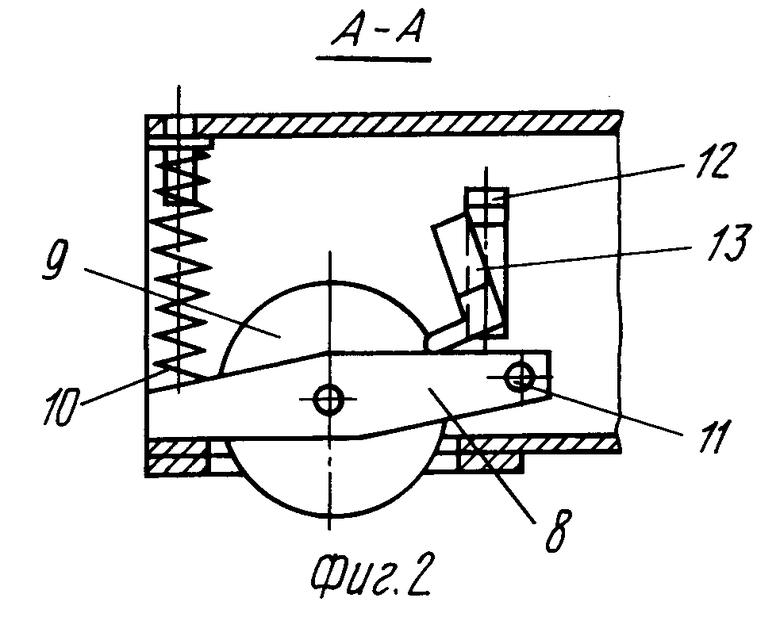
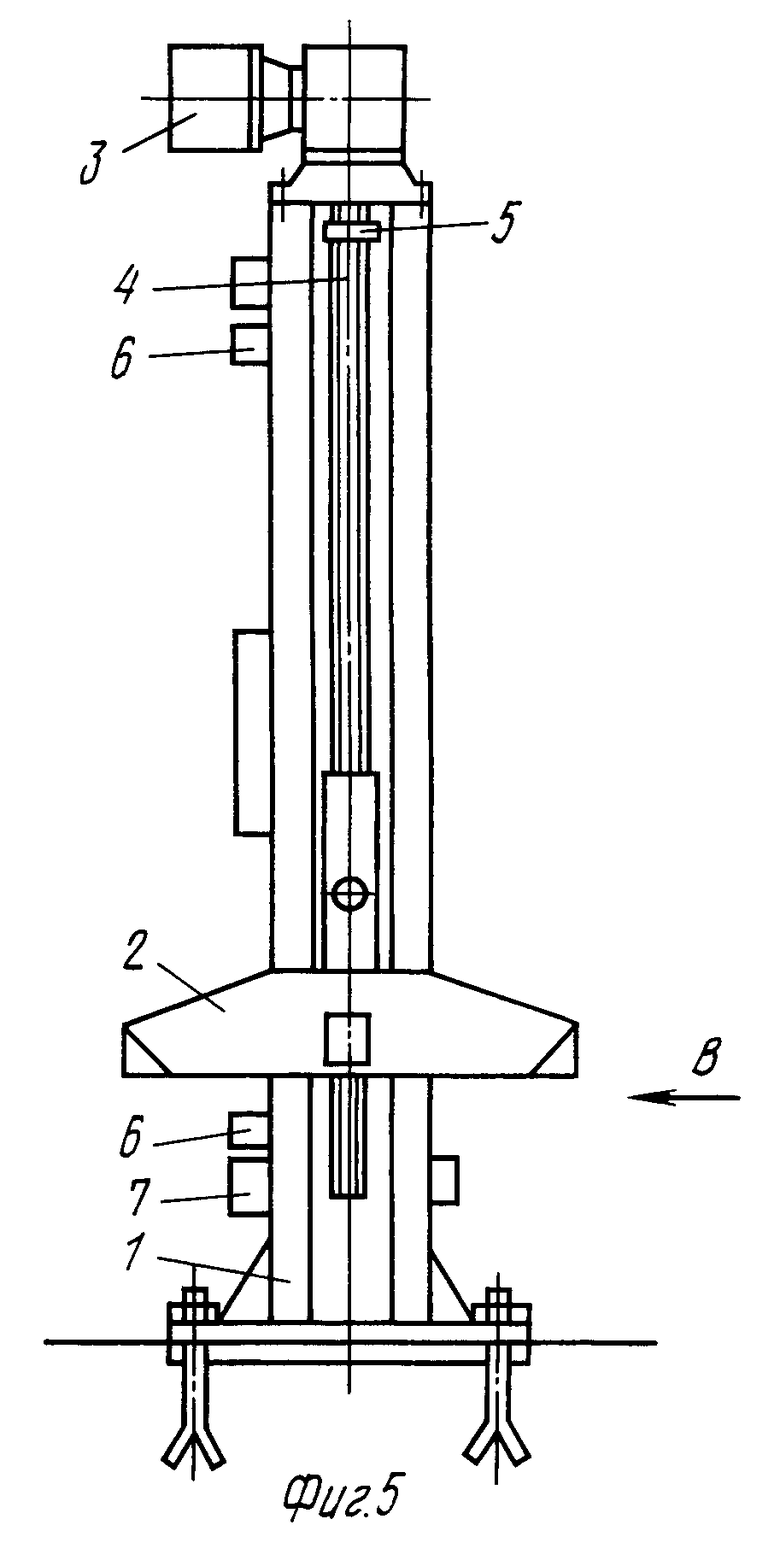
Подъемник содержит стойки 1, которые согласно первому варианту выполнены передвижными, в вертикальных направляющих стоек 1 установлены каретки 2 с площадками для транспортного средства. Каретки 2 связаны с механизмами их вертикального перемещения, включающими каждый связанный с электроприводом 3 винт 4. Грузовая и страховочная гайка каждого механизма (на чертежах не показано) связаны с соответствующей кареткой 2. Устройство управления перемещением кареток 2 содержит приспособления 5 преобразования вращения винтов 4, сигнализаторы 6 крайних положений кареток 2, аварийные выключатели 7, срабатывающие при срезе резьбы грузовой части гайки, сигнальные устройства положения транспортного средства на каретках. Последние из упомянутых устройств размещены согласно первому варианту в лапах каждой стойки подъемника и состоят из рамы 8, на оси которой установлено колесо 9, одна сторона которой подпружинена пружиной 10, а другая закреплена в проеме лапы с помощью шпильки 11. В проеме лапы закреплен индуктивный щелевой преобразователь 12 и флажок 13 с упором на раму. Приспособление 5 размещено на винте у верхней опоры и состоит из закрепленной на винте 4 крыльчатки 14 и индуктивного щелевого преобразователя 15, закрепленного на винте 4 вильчатым кронштейном 16. Для того, чтобы избежать вращения вильчатого кронштейна от движения винта, вильчатый кронштейн застопорен шпилькой 17, закрепленной в верхней опоре.
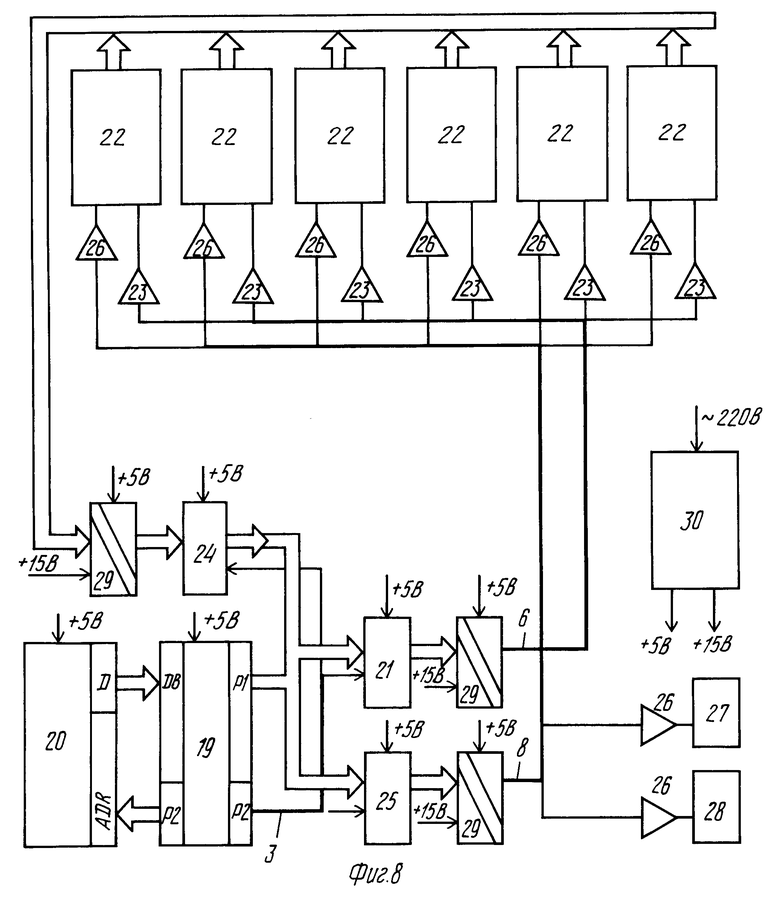
Схема устройства управления подъемными механизмами подъемника на основе микропроцессора 18 показана на фиг.8. В качестве анализирующего логического элемента применена однокристальная восьми- разрядная микроЭВМ 19. Постоянное запоминающее устройство обозначено позицией 20.
Регистр 21 предназначен для опроса состояния приспособлений преобразования вращения винтов, сигнализаторов крайних положений кареток, сигнальных устройств положения обслуживаемого транспортного средства на каретках подъемника и кнопок управления стоек 22 посредством ключей 23, а регистp 24 - для запоминания состояния вышеупомянутых устройств. Регистр 25 предназначен для управления посредством ключей 26 электроприводами 3 и реверсивными магнитными пускателями 27, 28. Оптоэлектронная развязка 29 служит для гальванического разделения (с целью защиты микропроцессора) от трехфазной сети. Микропроцессор, регистры, ключи, оптоэлектронная развязка и все вышеупомянутые устройства стоек запитываются от платы питания 30.
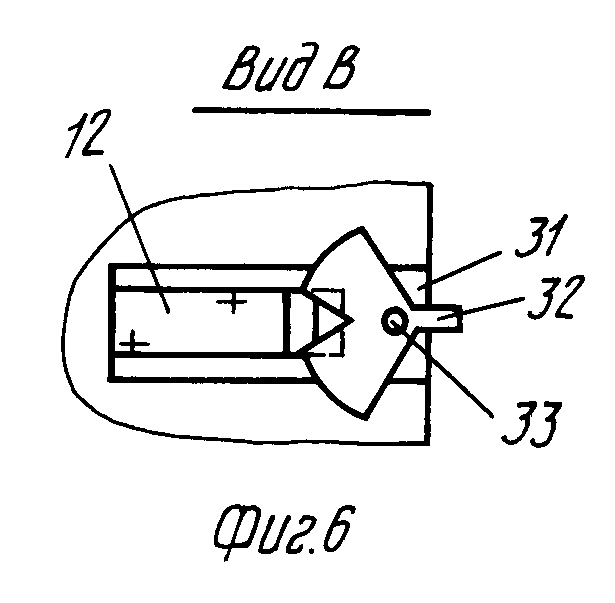
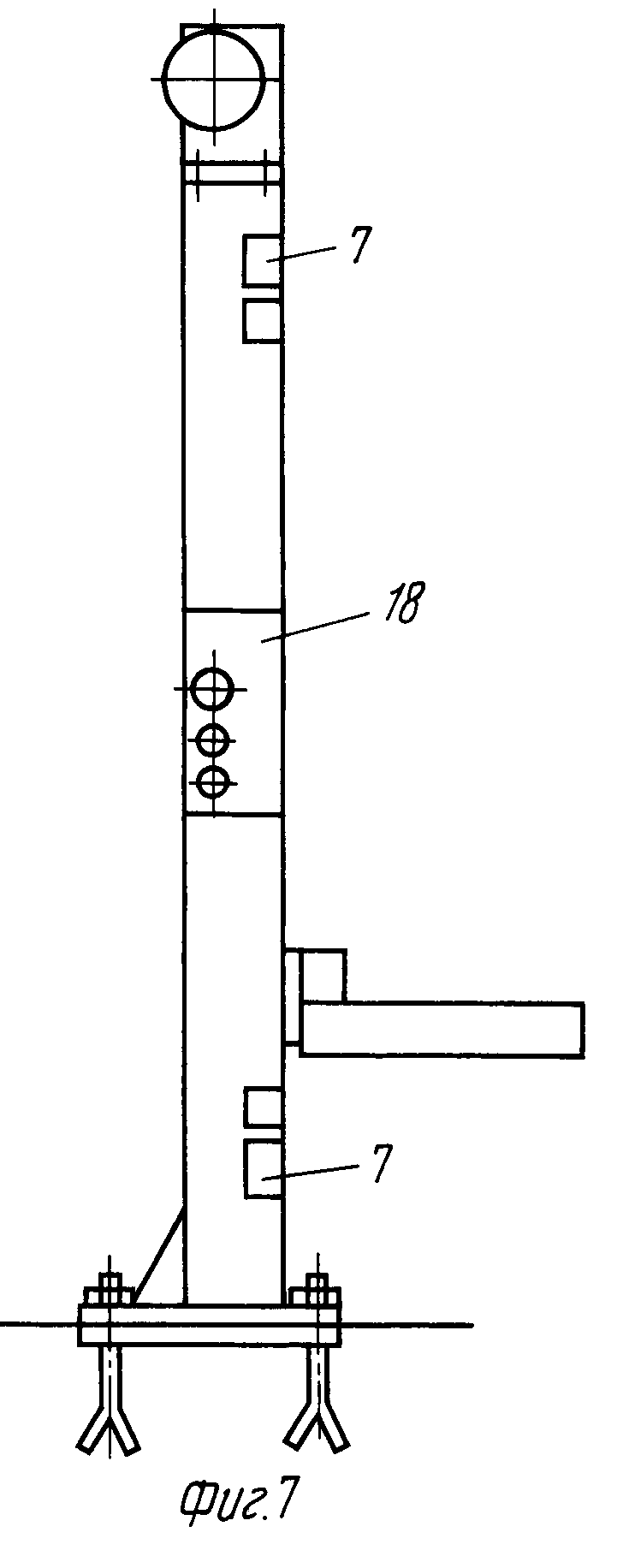
Согласно второму варианту стойки 1 закреплены неподвижно. Сигнальное устройство взаимобезопасного положения обслуживаемого транспортного средства на каретках подъемника размещено на стойке с возможностью изменения положения по высоте стойки и его индуктивный щелевой преобразователь 12 закреплен на корпусе 31 устройства, а флажок 32 установлен на оси 33.
Конструкция и размещение устройства движения подъемных механизмов, состав и организация управления на основе микропроцессора идентичны ранее описанному.
Подъемник работает следующим образом. При включенном питании управления подъемными механизмами (механизмами вертикального перемещения кареток 2) микропроцессор 18 постоянно опрашивает состояние всех вышеупомянутых устройств и кнопок стоек. При упоре вильчатого захвата каретки 2 в транспортное средство должно происходить срабатывание обоих сигнальных устройств положения транспортного средства (фиг.2): под действием нагрузки колесо 9 проворачивает раму 8 вокруг шпильки 11, сжимая пружину 10, при этом флажок 13 заходит в индуктивный щелевой преобразователь 12. Совместное срабатывание обоих индуктивных щелевых преобразователей формирует сигнал на микропроцессор. Это означает, что нагрузка на вильчатый захват каретки распределена равномерно, стойка не перекошена, движение каретки подъемного механизма в этой стойке безопасно. При нажатой кнопке "Вверх" микропроцессор через регистр 25 ключом 26 включает реверсивный магнитный пускатель 27 или 28 соответственно направлению движения и чередованию фаз сети. Анализируя информацию от стойки, микропроцессор определяет состояние сигнального устройства крайнего верхнего положения каретки. При наличии сигнала о срабатывании упомянутого устройства микропроцессор блокирует возможность включения электроприводов 3 всех стоек или выключает их при движении.
При отсутствии сигналов от сигнальных устройств крайнего верхнего положения кареток микропроцессор определяет наличие сигнала от пар сигнальных устройств взаимобезопасного положения транспортного средства на каретках и при его наличии от пары упомянутых сигнальных устройств конкретной стойки проверяет, находится ли в его памяти информация о срабатывании остальных пар упомянутых сигнальных устройств других стоек. В этом случае микропроцессор включает электропривод 3 всех стоек для синхронного подъема, так как совместное состояние всех упомянутых сигнальных устройств (их срабатывание) означает безопасное положение транспортного средства относительно подъемника. При отсутствии в памяти микропроцессора информации о срабатывании остальных пар упомянутых сигнальных устройств микропроцессор блокирует движение каретки конкретной стойки выключением электропривода и переходит на опрос и анализ информации от следующих стоек.
При отсутствии сигнала от пары вышеупомянутых сигнальных устройств конкретной стойки микропроцессор позволяет продолжать движение каретки ее подъемному механизму и переходит к опросу и анализу информации следующих стоек. В любом случае микропроцессор устанавливает коллективный (синхронный) подъем только при наличии информации, что все вышеупомянутые сигнальные устройства положения обслуживаемого транспортного средства для стоек, подключенных к управлению, сработали.
При синхронном подъеме микропроцессор постоянно с частотой 100-200 Гц ведет опрос стоек, анализируя информационные сигналы от трех видов устройств - преобразования движения подъемных механизмов, пар сигнальных устройств о взаимобезопасном положении обслуживаемого транспортного средства на каретках подъемника, сигнальных устройств крайних положений кареток (верхних или нижних в зависимости от направления движения).
При этом сигнал с приспособления преобразования вращения винтов 4, представляющий собой последовательность электрических импульсов, формируемых при вращении крыльчатки относительно индуктивного щелевого преобразователя 15, частота которых пропорциональна частоте вращения крыльчатки 14, фиксируется и запоминается микропроцессором как информация об изменении состояния вышеупомянутого приспособления.
За определенное количество циклов опросов стоек микропроцессор анализирует информацию, во-первых, на наличие заданного числа изменений состояний устройства. Если заданное число не подтверждается, микропроцессор выключает все электроприводы 3 и блокирует возможность их повторного включения, так как это означает неисправность электропривода 3, перегрузку стойки подъемника, неисправность питающей сети. Подтверждение заданного (и более) числа изменений состояний устройства означает исправную работу электропривода, нормальную загрузку каретки. При выполнении этого условия микропроцессор, во-вторых, анализирует информацию на заданную в памяти разность изменений состояний приспособлений преобразования движения относительно наименьшего по стойкам значения. При получении разности изменения состояний больше заданной микропроцессор производит корректировку движения подъемных механизмов, отключая электропривод стойки, для которой эта разность зафиксирована. Движение каретки по стойке возобновляется, если разность скорректирована. Одновременно при каждом опросе стойки микропроцессором проверяется состояние сигнальных устройств крайнего верхнего (нижнего) положения и сигнальных устройств взаимобезопасного положения обслуживаемого транспортного средства на каретках подъемника. Сигнал или отсутствие сигнала от пары сигнальных устройств взаимобезопасного положения обслуживаемого транспортного средства на каретках подъемника приводит к отключению микропроцессором всех электроприводов и к блокировке повторного пуска, т.к. это означает аварийную ситуацию вследствие надлома вилки каретки, перекоса транспортного средства или стойки при подъеме или окончании подъема.
Работа подъемника по второму варианту в целом аналогична описанной в примере выполнения по первому варианту за исключением следующих особенностей. При движении каретки подъемного механизма по стойке срабатывание сигнального устройства положения обслуживаемого транспортного средства на каретках должно происходить так: каретка толкает флажок 32, который, поворачиваясь вокруг оси 33, заходит в индуктивный щелевой преобразователь 12, сигнал от которого поступает на микропроцессор и анализируется на его состояние.
При обнаружении срабатывания вышеупомянутого сигнального устройства и отсутствии в памяти микропроцессора информации о срабатывании аналогичных сигнальных устройств микропроцессор блокирует движение каретки конкретной стойки, переходит к опросу других стоек, одновременно накапливая информацию о количестве изменений состояний приспособлений преобразования движения подъемных механизмов этих стоек и проверяя ее на заданное значение. Если зафиксировано количество изменений состояний приспособлений преобразования вращения винтов подъемных механизмов больше заданного хотя бы для одной стойки, микропроцессор отключает все электроприводы и блокирует повторный пуск подъемника, так как это означает или неисправность одного из сигнальных устройств взаимобезопасного положения обслуживаемого транспортного средства на каретках, или же положение транспортного средства относительно стоек небезопасно.
Если количество изменений состояний приспособлений преобразования вращения винтов подъемных механизмов для всех стоек меньше заданного, движение кареток продолжается до срабатывания вышеупомянутых сигнальных устройств. Коллективный (синхронный) подъем устанавливается, как и по первому варианту, только в том случае, если сработали все вышеупомянутые сигнальные устройства.
Изменение положения сигнальных устройств взаимобезопасного положения обслуживаемого транспортного средства на каретках по высоте стойки позволяет создать при подъеме положение транспортного средства, удобное для обслуживания и в то же время с требуемой безопасностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвижный подъемник для автомобилей | 1989 |
|
SU1721000A1 |
| ДВУХСТОЕЧНЫЙ ПОДЪЕМНИК ДЛЯ ЛЕГКОВЫХ АВТОМОБИЛЕЙ | 1998 |
|
RU2228898C2 |
| Строительный подъемник | 1971 |
|
SU450763A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 2017 |
|
RU2655967C1 |
| ТРАНСПОРТНО-СПЛОТОЧНЫЙ АГРЕГАТ | 1973 |
|
SU408847A1 |
| ПОДКАТНОЙ АВТОМОБИЛЬНЫЙ ПОДЪЕМНИК (ВАРИАНТЫ) | 2023 |
|
RU2804714C1 |
| АВТОМАТИЗИРОВАННАЯ СТОЯНКА ДЛЯ АВТОМОБИЛЕЙ | 2017 |
|
RU2641155C1 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ОБСЛУЖИВАНИЯ ФАСАДОВ ЗДАНИЙ | 2015 |
|
RU2579376C1 |
| ПОДЪЕМНИК ДЛЯ МОНТАЖА ДЛИННОМЕРНЫХ КОНСТРУКЦИЙ | 2005 |
|
RU2298522C2 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
Использование: для подъема автомобилей. Сущность изобретения: подъемник содержит устройство управления перемещением кареток с сигнальными устройствами взаимобезопасного положения подъемника и обслуживаемого транспортного средства. Приспособления преобразования вращения винтов подъемных механизмов содержат крыльчатки, закрепленные на винтах, и щелевые индуктивные преобразователи закрепленные на тех же винтах. Сигнальные устройства взаимобезопасного положения подъемника и обслуживаемого транспортного средства совместно с преобразователями движения подъемных механизмов связаны с блоком задания программ микропроцессора функциональной связью. Установление синхронного подъема по взаимосвязи движения подъемных механизмов с положением транспортного средства относительно подъемника обеспечивает повышение точности синхронизации во времени, неподвижную электрическую связь преобразователей движения подъемных механизмов с управлением, автоматизацию работы. 8 ил.
ПОДЪЕМНИК ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, содержащий стойки с вертикальными направляющими, в которых установлены грузоподъемные каретки с площадками для транспортного средства, механизмы вертикального перемещения упомянутых кареток, каждый из которых включает в себя размещенный вдоль соответствующей стойки, связанный с электроприводом винт с грузовой и страховочной гайками, с которыми соединена каретка этой стойки, и устройство управления перемещением кареток, включающее в себя блок задания программ микропроцессора, размещенные на каждой стойке сигнализаторы крайних положений соответствующей каретки и аварийные выключатели, а также приспособления преобразования вращения винтов механизмов вертикального перемещения кареток, отличающийся тем, что устройство управления перемещением кареток снабжено сигнальными устройствами положения транспортного средства на каретках, подключенными к блоку задания программ регистрами опроса состояния и запоминания этого состояния приспособлений преобразования винтов всех стоек упомянутых сигнальных устройств, сигнализаторов крайних положений кареток и кнопок включения электроприводов винтов стоек и регистром управления этими электроприводами, при этом каждое приспособление преобразования вращения соответствующего винта содержит крыльчатку, соединенную с этим винтом в зоне его верхней опоры, и размещенный с возможностью взаимодействия с лопастями крыльчатки щелевой индуктивный преобразователь.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Каталог-справочник | |||
| Специализированное оборудование капиталлистических стран для ТО и ТР автомобилей | |||
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
