Область техники
Изобретение относится к области навигационных приборов и систем и может быть использовано для определения с высокой точностью координат места и параметров движения маневренных летательных аппаратов.
Уровень техники
Для определения координат места и параметров движения широко используются бесплатформенные инерциальные навигационные системы (БИНС). Они содержат датчики угловой скорости (гироскопы) и датчики кажущегося ускорения (акселерометры), выходные сигналы которых при специальной математической обработке позволяют определять выходные навигационные и пилотажные данные: географические координаты, составляющие вектора земной скорости, углы курса, тангажа и крена, составляющие линейного ускорения и угловой скорости летательного аппарата в связанных с ним осях (Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991).
Недостатком БИНС является тенденция к неограниченному увеличению погрешностей выходных данных во времени. С развитием спутниковых навигационных систем (ГЛОНАСС, GPS) для компенсации этого недостатка стало возможным использование бортовой аппаратуры спутниковой навигации (АСН). Выходная навигационная информация АСН (географические координаты и составляющие вектора земной скорости) может быть использована для ее сопоставления с автономно счисляемыми в БИНС навигационными данными. Невязки координат и вектора скорости обеспечивают также возможность оценивания (на основе алгоритмов динамической фильтрации) погрешностей углов курса, тангажа и крена, а также нескомпенсированных дрейфов датчиков угловой скорости.
При построении алгоритмов оптимальной совместной обработки спутниковой навигационной информации и инерциальных данных следует учитывать особенности, свойственные процессам формирования и передачи информационных сигналов.
Выходные навигационные данные БИНС формируются при реализации вычислений в быстром (с частотой 200…1600 Гц) и медленном (с частотой 50…200 Гц) циклах работы встроенного вычислителя навигационной системы (Paul G. Savage. Strapdown System Computational Elements. - RTO-LS-232 (2004) Pre-Prints, 2004). На вход вычислительного алгоритма подают сигналы датчиков угловой скорости (гироскопов) и датчиков линейного ускорения (акселерометров). В общем случае частота опроса гироскопов и акселерометров различна, но при первичной обработке сигналов может быть приведена к частоте вычислений в быстром цикле. Частота обновления выходных навигационных данных БИНС совпадает с частотой вычислений в медленном цикле. Выходные навигационные данные БИНС актуальны в отдельные моменты опроса датчиков. В то же время обновление данных в выходных цифровых линиях осуществляется с некоторой задержкой относительно момента актуальности, связанной с необходимостью выполнения математической обработки.
Выходные данные АСН характеризуются наличием специального импульсного сигнала, обозначающего момент фиксации первичных радионавигационных измерений - и, соответственно, актуальности выходной спутниковой навигационной информации, формируемой при вторичной обработке в АСН (Глобальная спутниковая радионавигационная система ГЛОНАСС / Под ред. В.Н.Харисова, А.И.Перова, В.А.Болдина. - М.: ИПРЖР, 1998). Вторичная обработка осуществляется в вычислителе АСН в течение некоторого времени, и это приводит к соответствующей задержке обновления данных в выходных цифровых линиях.
Вследствие задержки выходных данных возникает динамическая погрешность, которая оказывает неблагоприятное влияние на процесс совместной обработки спутниковой навигационной информации с навигационными данными, автономно счисляемыми в инерциальной навигационной системе. Они могут проявляться в нарушении работоспособности алгоритма оптимальной совместной обработки информации в комплексной инерциально-спутниковой системе летательного аппарата при его маневрировании.
Известной является инерциально-спутниковая навигационная система (патент RU 2148796 C1, заявка №98120280/28 от 05.11.1998 г.). Как и заявляемое изобретение, данная система наряду со средствами инерциальной навигации содержит аппаратуру спутниковой навигации (приемник спутниковой навигационной системы). В данной системе реализована совместная обработка спутниковой информации и инерциальных данных с целью повышения точности. Однако обработка информации в данной системе осуществляется непрерывно во времени, без учета временной дискретизации и задержек при цифровой обработке и передаче информации по цифровым линиям связи.
Известна комплексная навигационная система (патент RU 2265190 С1, заявка №2004108184/28 от 23.03.2004 г.). Как и заявляемое изобретение, данная система в целях комплексирования навигационных средств содержит блок формирования невязки, блоки оптимальной обработки информации на основе алгоритмов динамической фильтрации (блок прогноза и блок оценивания). Однако в данной системе не предпринимаются меры по временной синхронизации сопоставляемых информационных потоков. На практике это приведет к наличию динамических погрешностей в составе невязок навигационных данных при маневрировании летательного аппарата, вследствие чего точность выходной информации комплексной системы будет ограничена.
Известны интегрированная инерциально-спутниковая навигационная система (патент RU 2277696 С2, заявка №2004111865/28 от 21.04.2004 г.) и инерциально-спутниковая навигационная система с комбинированным использованием спутниковых данных (патент RU 2334199 С1, заявка №2007110428/28 от 19.03.2007 г.). Как и заявляемое изобретение, данные системы наряду со средствами инерциальной навигации содержат аппаратуру спутниковой навигации (многоканальный радиоприемник), блок комплексной обработки (блок комплексирования информации). Системы реализуют комплексную оптимальную обработку информации на основе алгоритмов динамической фильтрации. Однако в них также не предпринимаются меры по временной синхронизации сопоставляемых информационных потоков.
Известна комплексированная бесплатформенная инерциально-спутниковая система навигации на «грубых» чувствительных элементах (патент RU 2380656 С0, заявка №2008150960/28 от 24.12.2008 г.). Данная система так же, как и предлагаемая, содержит аппаратуру спутниковой навигации, блок датчиков угловой скорости и датчиков линейных ускорений. Ее вычислительная платформа содержит блоки кватернионных вычислений и пересчета ускорений из связанной в навигационную систему координат, которые осуществляются в быстром цикле вычислителя предлагаемой системы, а также блок вычисления матрицы направляющих косинусов и углов ориентации и блок вычисления линейных и угловых скоростей навигационной системы координат, которые осуществляются в медленном цикле вычислителя предлагаемой системы. Она содержит мастер-фильтр, в котором осуществляется совместная обработка инерциальной и спутниковой информации. Однако в ней также не предпринимаются меры по временной синхронизации сопоставляемых информационных потоков. Как уже было сказано, следствием этого является ограниченная точность выходной информации комплексной системы.
Известна система измерения угловых положений летательного аппарата (патент RU 2244262, заявка №2002135344/28 от 27.12.2002). Как и заявляемое изобретение, данная система содержит датчики угловых скоростей и линейных ускорений, а также АСН (спутниковую навигационную систему). Однако в данном патенте используется синхронный прием данных от информационных систем. Поэтому его применение для наиболее типичного на практике случая, когда частоты поступления измерений и навигационных данных различны и могут даже быть некогерентными, представляется проблематичным и приведет к ограниченной точности выходной информации комплексной системы.
Наиболее близким аналогом (прототипом) к заявляемому изобретению является комплексная навигационная система (патент RU 2178147 С1, заявка №2000124858/28 от 03.10.2000 г.). Как и заявляемое изобретение, данная система наряду со средствами инерциальной навигации содержит аппаратуру спутниковой навигации (спутниковую навигационную систему). В данной системе реализована функция формирования невязок с учетом временного сдвига между моментом актуальности спутниковой навигационной информации и моментом обновления информации в цифровой линии связи. (Специальная экстраполяция спутниковой навигационной информации обеспечивается благодаря введению соответствующих усилителей, сумматоров, интеграторов, линии задержки.) За счет этого уменьшаются динамические погрешности невязок, и, следовательно, обеспечивается повышение точности навигационной информации.
Недостаток данной системы во всех рассмотренных в патенте вариантах состоит в том, что не учтена временная дискретность при обработке сигналов в БИНС и выдаче информации из нее. Так, неучет временного кванта 1/50 с при формировании в медленном цикле вычислений БИНС выходных сигналов координат и вектора скорости для летательного аппарата, совершающего на скорости 200 м/с вираж с креном 60° (с боковым ускорением 17,3 м/с2), станет причиной динамической погрешности при формировании невязки: по координатам - до 4 м, по скорости - до 0,35 м/с. Эти величины сопоставимы с погрешностями спутниковой навигации в обычном режиме функционирования, а для дифференциального режима АСН - превышают в два раза и более.
Кроме того, из-за особенностей диспетчеризации вычислительных процедур в АСН временная задержка между моментами актуальности навигационной информации и обновления выходных данных может являться величиной переменной. Этот факт также приведет к снижению точности данной системы.
Таким образом, основной недостаток известных инерциально-спутниковых навигационных систем заключается в недостаточно точной временной синхронизации выходных навигационных данных БИНС и спутниковой навигационной информации при формировании невязок координат и вектора скорости. Это приводит к динамическим погрешностям невязок и, вследствие этого, к проблемам при комплексной обработке информации. В конечном счете - к ограничению точности комплексной навигационной системы. Эти ограничения становятся наиболее заметными при маневрировании объекта.
Главная задача изобретения - повысить точность комплексной инерциально-спутниковой навигационной системы за счет организации точной временной синхронизации потоков навигационных данных.
Раскрытие изобретения
Воплощение изобретения позволит за счет организации точной временной синхронизации потоков навигационных данных повысить точность комплексной инерциально-спутниковой навигационной системы.
Для получения технического результата предлагаемая система содержит: блок датчиков угловой скорости, блок датчиков линейного ускорения, блок первичной обработки сигналов угловой скорости, блок первичной обработки сигналов линейного ускорения, аппаратуру спутниковой навигации, генератор тактовых импульсов, координирующее временное устройство, цифровую вычислительную машину, которая включает модуль вычислений быстрого цикла, модуль вычислений медленного цикла, модуль формирования невязок, модуль комплексной обработки.
Выход генератора тактовых импульсов соединен со входом координирующего временного устройства и с соответствующим входом цифровой вычислительной машины (в части модуля формирования невязок).
Координирующее временное устройство своими выходами соединено с соответствующими входами блока датчиков угловой скорости, блока датчиков линейного ускорения, блока первичной обработки сигналов угловой скорости, блока первичной обработки сигналов линейного ускорения и цифровой вычислительной машины (в части модуля вычислений быстрого цикла, модуля вычислений медленного цикла, модуля формирования невязок, модуля комплексной обработки).
Выход блока датчиков угловой скорости соединен с соответствующим входом блока первичной обработки сигналов угловой скорости.
Выход блока датчиков линейного ускорения соединен с соответствующим входом блока первичной обработки сигналов линейного ускорения.
Выходы блока первичной обработки сигналов угловой скорости и блока первичной обработки сигналов линейного ускорения соединены с соответствующими входами цифровой вычислительной машины (в части модуля вычислений быстрого цикла и модуля формирования невязок).
Выход модуля вычислений быстрого цикла соединен с соответствующими входами модуля вычислений медленного цикла и модуля формирования невязок.
Выход модуля вычислений медленного цикла образует пилотажно-навигационные данные и соединен с соответствующими входами модуля комплексной обработки и модуля формирования невязок.
Выход модуля формирования невязок соединен с соответствующим входом модуля комплексной обработки.
Выход цифровой вычислительной машины (в части модуля комплексной обработки) образует выход пилотажно-навигационных данных высокой точности.
Краткое описание чертежа
На чертеже показана блок-схема предлагаемой системы.
В состав предлагаемой системы входят:
1 - генератор тактовых импульсов (ГТИ);
2 - координирующее временное устройство (КВУ);
3 - цифровая вычислительная машина (ЦВМ);
4 - аппаратура спутниковой навигации (АСН);
5 - модуль формирования невязок (МФН) ЦВМ;
6 - модуль комплексной обработки (МКО) ЦВМ;
7 - блок датчиков угловой скорости (БДУС);
8 - блок первичной обработки сигналов угловой скорости (БПОДУС);
9 - модуль вычислений быстрого цикла (МВБЦ) ЦВМ;
10 - модуль вычислений медленного цикла (МВМЦ) ЦВМ;
11 - блок датчиков линейного ускорения (БДЛУ);
12 - блок первичной обработки сигналов линейного ускорения (БПОДЛУ).
Информационный обмен между входами и выходами блоков осуществляется по линиям связи, показанным на чертеже направленными линиями (как сплошными, так и пунктирными). Пунктирными линиями показаны сигналы тактирующих импульсов. Сплошными линиями - линии передачи сигналов по цифровым линиям связи, в том числе по линиям передачи последовательного и параллельного кода. Двойными линиями показаны направления передачи данных при обработке в цифровой вычислительной машине системы.
На чертеже используются следующие условные обозначения сигналов:
fГТИ - тактирующий сигнал системы;
fМЦ - тактирующий сигнал медленного цикла вычислений в цифровой вычислительной машине;
fБЦ - тактирующий сигнал быстрого цикла вычислений в цифровой вычислительной машине;
f1с - тактирующий сигнал актуальности спутниковой навигационной информации;
{ПНДВТ} - пилотажно-навигационные данные высокой точности;
ВС, LC, hC, vENU C - спутниковая навигационная информация: геодезические широта, долгота и высота, а также вектор земной скорости в осях «восток-север-вертикаль»;
{ПН} - параметры невязок навигационной информации;
fω - тактирующий сигнал опроса датчиков угловой скорости;
ω - вектор измеренной угловой скорости в связанных осях объекта;
q - вектор приращения кажущегося угла в связанных осях объекта;
{ПБЦ} - параметры быстрого цикла вычислений в цифровой вычислительной машине;
{ПНД} - пилотажно-навигационные данные;
fа - тактирующий сигнал опроса датчиков линейного ускорения;
а - вектор измеренного линейного ускорения в связанных осях объекта;
Δv - вектор приращения кажущейся скорости в связанных осях объекта.
Осуществление изобретения
В блоке датчиков угловой скорости 6 обеспечивается измерение вектора угловой скорости объекта в проекциях на связанные оси со и выдача сигналов измерений, например, по цифровой линии в виде кода последовательного по ГОСТ 18977-79.
В блоке датчиков линейного ускорения 10 обеспечивается измерение вектора линейного ускорения объекта в проекциях на связанные оси а и выдача сигналов измерений, например, по цифровой линии в виде кода параллельного по ГОСТ 18977-79.
В блоках первичной обработки сигналов угловой скорости 8 и первичной обработки сигналов линейного ускорения 12 в сверхбыстром темпе осуществляется обработка сигналов измерений. Она заключается, например, в их интегрировании для приведения к частоте быстрого цикла вычислений:
 ,
,  , где
, где
ТБЦ - длительность интервала вычислений быстрого цикла ЦВМ;
Nω и Na - соответственно количество отсчетов измерений угловой скорости и линейного ускорения на интервале вычислений быстрого цикла.
Выходные данные блоков первичной обработки сигналов с некоторой детерминированной задержкой актуальны на момент тактирующего импульса fБЦ.
В модуле вычислений быстрого цикла ЦВМ 9 осуществляется математическая обработка для определения параметров быстрого цикла {ПБЦ}, которые являются промежуточными данными алгоритма бесплатформенной инерциальной навигации. Обработка может осуществляться, например, согласно [Paul G. Savage. Strapdown System Computational Elements. - RTO-LS-232 (2004) Pre-Prints, 2004]. В состав параметров быстрого цикла в этом случае будут входить, в частности, приращение кажущейся скорости и вектор кажущегося поворота объекта на интервале вычислений внутри такта быстрого цикла. Выходные данные модуля вычислений быстрого цикла с некоторой детерминированной задержкой актуальны на момент тактирующего импульса fБЦ.
В модуле вычислений медленного цикла ЦВМ 10 осуществляется математическая обработка для определения пилотажно-навигационных данных {ПНД}, которые являются выходными данными алгоритма бесплатформенной инерциальной навигации. Обработка может осуществляться, например, согласно [Paul G. Savage. Strapdown System Computational Elements. - RTO-LS-232 (2004) Pre-Prints, 2004]. В состав пилотажно-навигационных данных в этом случае будут входить, в частности, географические координаты объекта, вектор его земной скорости и пилотажные углы летательного аппарата. Выходные данные модуля вычислений медленного цикла с некоторой детерминированной задержкой актуальны на момент тактирующего импульса fМЦ.
В модуле формирования невязок 5 осуществляется сопоставление спутниковой навигационной информации и входящих в состав {ПНД} данных инерциальной навигации: геодезических широты BИ, долготы LИ и высоты hИ и вектора земной скорости в осях «восток-север-вертикаль» vENU И.
Для сопоставления навигационной информации используется единый момент времени, соответствующий переднему фронту импульса f1c «секундной метки» АСH. Спутниковые навигационные данные (широта ВC, долгота LC, высота hC, вектор земной скорости vENU C), передаваемые с некоторой детерминированной задержкой, например по цифровой линии в виде кода последовательного по ГОСТ 18977-79, актуальны строго на этот момент времени. В то же время для приведения инерциальных пилотажно-навигационных данных в модуле МФН выполняется соответствующая обработка данных:
1) с использованием обнуляемого по импульсам fБЦ и фиксируемого по импульсам f1с счетчика импульсов fГТИ определяется устаревание параметров быстрого цикла τБЦ;
2) по алгоритму, идентичному выполняемому в модуле МВМЦ [Paul G.Savage. Strapdown System Computational Elements. - RTO-LS-232 (2004) Pre-Prints, 2004], осуществляется внеочередной расчет данных инерциальной навигации с использованием текущих значений параметров быстрого цикла {ПБЦ};
3) при получении очередных (соответствующих следующему за импульсом f1c отсчету fБЦ) сигналов q, Δv они масштабируются пропорционально устареванию параметров быстрого цикла:
 ,
,  ,
,
затем масштабированные сигналы инерциальных измерений используются для уточнения инерциальных навигационных данных согласно следующим шагам 4) и 5);
4) по масштабированным данным q*, Δv* рассчитываются на одном шаге параметры быстрого цикла по алгоритму, идентичному выполняемому в модуле МВБЦ [Paul G. Savage. Strapdown System Computational Elements. - RTO-LS-232 (2004) Pre-Prints, 2004];
5) по результатам расчета на одном шаге параметров быстрого цикла выполняется обновление инерциальных навигационных даннных по алгоритму, идентичному выполняемому в модуле МВМЦ [Paul G. Savage. Strapdown System Computational Elements. - RTO-LS-232 (2004) Pre-Prints, 2004].
В результате выполнения обработки по пп.1-5 обеспечивается приведение инерциальных навигационных данных к моменту актуальности спутниковой навигационной информации. Это позволяет сформировать невязки инерциальных и спутниковых навигационных данных:
ΔBИС=BИ-BС;
ΔLИС=LИ-LС;
ΔhИС=hИ-hС;

Эти невязки актуальны на момент переднего фронта импульса f1с «секундной метки» АСН. Их динамические ошибки сведены к минимуму.
В модуле комплексной обработки 6 на основе метода динамической фильтрации осуществляется оценка погрешностей инерциальных пилотажно-навигационных данных с использованием известных алгоритмов прогноза и коррекции (см., например, патент RU 2265190 С1, заявка №2004108184/28 от 23.03.2004 г.). Благодаря минимальным динамическим искажениям невязок в отличие от известных систем комплексная обработка сигналов в заявляемом изобретении обеспечит более высокие характеристики точности.
Кроме того, в модуле комплексной обработки 6 осуществляется коррекция инерциальных пилотажно-навигационных данных на величину актуальных на моменты f1с оценок для их погрешностей. Таким образом, формируются пилотажно-навигационные данные высокой точности {ПНДВТ} системы.
Благодаря медленной динамике погрешностей инерциальных пилотажно-навигационных данных при их компенсации в модуле МКО допустимо использование оценок, полученных на предыдущем такте работы алгоритма калмановской фильтрации, с их линейной экстраполяцией на моменты fМЦ.
Для координации работы компонентов в системе используется несколько тактирующих сигналов.
Генератор тактовых импульсов 1 формирует тактирующий сигнал системы fГТИ, который служит основой единой шкалы времени. (В качестве такого может служить, например, импульсный сигнал дискретно-аналогового типа по ГОСТ 18977-79 с частотой 1 МГц.)
Этот сигнал используется в координирующем временном устройстве 2 для формирования методом деления частоты управляющих импульсов fω, fа, fБЦ, fМЦ.
Тактирующий сигнал опроса датчиков угловой скорости fω (например, импульсы по ГОСТ 18977-79 с частотой fГТИ/625=1600 Гц) служит для фиксации в блоке датчиков угловой скорости очередного отсчета измеренного вектора угловой скорости объекта, а также для управления запросом очередного измерения из блока первичной обработки сигналов угловой скорости.
Тактирующий сигнал опроса датчиков линейного ускорения fа (например, импульсы по ГОСТ 18977-79 с частотой fГТИ/125=8000 Гц) служит для фиксации в блоке датчиков угловой скорости очередного отсчета измеренного вектора линейного ускорения объекта, а также для управления запросом очередного измерения из блока первичной обработки сигналов линейного ускорения.
Тактирующий сигнал быстрого цикла вычислений fБЦ (например, импульсы по ГОСТ 18977-79 с частотой fГТИ/2500=400 Гц) служит для фиксации в блоках первичной обработки сигналов угловой скорости и линейного ускорения выходных значений вектора приращения кажущегося угла q и вектора приращения кажущейся скорости Δv, a также для управления запросом этих сигналов из цифровой вычислительной машины (для передачи в модуль вычислений быстрого цикла и модуль формирования невязок).
Тактирующий сигнал медленного цикла вычислений fМЦ (например, импульсы по ГОСТ 18977-79 с частотой fГТИ/10000=100 Гц) служит для фиксации в модуле вычислений быстрого цикла выходных параметров, а также для управления их передачей в модуль вычислений медленного цикла и модуль формирования невязок. Передний фронт импульса определяет моменты актуальности пилотажно-навигационных данных {ПНД} и высокоточных выходных данных системы {ПНДВТ}.
Сигнал «секундной метки» ACH f1c используется в модуле МФН для определения устаревания параметров быстрого цикла (относительно момента актуальности спутниковой навигационной информации), а также в модуле МКО для определения устаревания оценок для погрешностей {ПНД} (относительно момента актуальности пилотажно-навигационных данных).
Таким образом, благодаря введению в состав системы генератора тактовых импульсов и координирующего временного устройства обеспечивается возможность такой организации процессов сбора инерциальных измерений и обработки инерциальной и спутниковой навигационной и пилотажной информации, при которой за счет минимальных динамических искажений невязок обеспечивается повышение точности выходной информации интегрированной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2215668C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| МНОГОПОЗИЦИОННЫЙ ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА С ПОВЫШЕННЫМИ МАНЕВРЕННЫМИ ВОЗМОЖНОСТЯМИ | 2004 |
|
RU2252900C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2015 |
|
RU2633703C1 |
Изобретение относится к измерительной технике и может быть использовано для определения с высокой точностью координат места и параметров движения маневренных летательных аппаратов. Технический результат - повышение точности. Для достижения данного результата навигационная система содержит блоки датчиков угловой скорости и датчиков линейного ускорения, которые через соответствующие блоки первичной обработки сигналов соединены с цифровой вычислительной машиной. Система также содержит аппаратуру спутниковой навигации, которая своими выходами соединена с цифровой вычислительной машиной. Дополнительно система снабжена генератором тактовых импульсов и координирующим временным устройством. Выход генератора тактовых импульсов соединен с входом координирующего временного устройства и с соответствующим входом цифровой вычислительной машины. Благодаря введению в состав системы генератора тактовых импульсов и координирующего временного устройства обеспечивается координация процессов сбора измерений и комплексной обработки информации, при которой имеют место минимальные динамические искажения. 1 ил.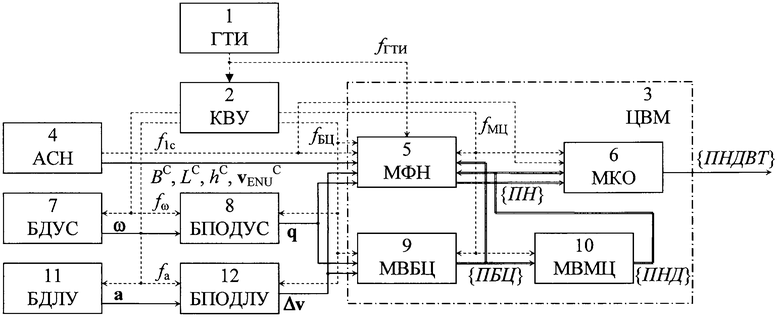
Комплексная инерциально-спутниковая навигационная система, содержащая блок датчиков угловой скорости, блок датчиков линейного ускорения, блок первичной обработки сигналов угловой скорости, блок первичной обработки сигналов линейного ускорения, аппаратуру спутниковой навигации, цифровую вычислительную машину, которая включает модуль вычислений быстрого цикла, модуль вычислений медленного цикла, модуль формирования невязок, модуль комплексной обработки, причем выход блока датчиков угловой скорости соединен с соответствующим входом блока первичной обработки сигналов угловой скорости, выход блока датчиков линейного ускорения соединен с соответствующим входом блока первичной обработки сигналов линейного ускорения, выходы блока первичной обработки сигналов угловой скорости и блока первичной обработки сигналов линейного ускорения соединены с соответствующими входами цифровой вычислительной машины (в части модуля вычислений быстрого цикла и модуля формирования невязок), выход модуля вычислений быстрого цикла соединен с соответствующими входами модуля вычислений медленного цикла и модуля формирования невязок, выход модуля вычислений медленного цикла образует пилотажно-навигационные данные и соединен с соответствующими входами модуля формирования невязок и модуля комплексной обработки, выходы аппаратуры спутниковой навигации соединены с соответствующими входами модуля формирования невязок, выход модуля формирования невязок соединен с соответствующим входом модуля комплексной обработки, выход цифровой вычислительной машины (в части модуля комплексной обработки) образует выход пилотажно-навигационных данных высокой точности, отличающаяся тем, что дополнительно снабжена генератором тактовых импульсов и координирующим временным устройством, причем выход генератора тактовых импульсов соединен с входом координирующего временного устройства и с соответствующим входом цифровой вычислительной машины (в части модуля формирования невязок), координирующее временное устройство своими выходами соединено с соответствующими входами блока датчиков угловой скорости, блока датчиков линейного ускорения, блока первичной обработки сигналов угловой скорости, блока первичной обработки сигналов линейного ускорения и цифровой вычислительной машины (в части модуля вычислений быстрого цикла, модуля вычислений медленного цикла, модуля формирования невязок, модуля комплексной обработки), а первый выход аппаратуры спутниковой навигации дополнительно соединен с соответствующим входом цифровой вычислительной машины (в части модуля комплексной обработки).
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА С КОМБИНИРОВАННЫМ ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ ДАННЫХ | 2007 |
|
RU2334199C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| US 3883812 A, 13.05.1975 | |||
| DE 19510910 A1, 28.09.1995. | |||

