Данное изобретение относится к области измерительной техники, а именно к гироскопическим преобразователям инерциальной информации.
Известны гироскопы [1] , содержащие гиромотор, ротор, кардан, датчики угла и момента.
Наиболее близким по технической сущности является гироскоп [2], содержащий гиромотор, ротор с внутренним карданом с первой и второй осями однорамочного подвеса, датчика угла и датчика момента по первой и второй измерительным осям, устройства балансировки ротора.
Недостатками такого гироскопа являются невысокие эффективность и технологичность балансировки из-за взаимного влияния видов балансировки друг на друга. Кроме того при балансировках путем перемещения масс (например, с помощью винтов) снижается точность балансировки за счет относительной подвижности соединения перемещаемых масс с ротором.
Техническим результатом изобретения является повышение технологичности, уменьшение трудоемкости и повышение точности балансировки ротора гироскопа.
Данный технический результат достигается в гироскопе, содержащим гиромотор, ротор с внутренним карданом с первой и второй осями однорамочного подвеса, датчики угла и датчики момента по первой и второй измерительным осям, устройства балансировки ротора, тем, что устройства балансировки ротора выполнены на внешней цилиндрической поверхности ротора, образующая которого параллельна его оси вращения, в виде выполненных заодно с ротором 2k+1 ободков, образующие поверхности которых параллельны оси вращения ротора, а плоскости симметрии ободков перпендикулярны оси вращения, ободки расположены так, что плоскость симметрии одного ободка проходит черед центр пересечения первой и второй осей подвеса, плоскости симметрии других ободков и расположены симметрично попарно по разные стороны от центра пересечения первой и второй оси подвеса, на каждом ободке образованы выполненные заодно с ними две пары выступов так, что центр масс каждого выступа расположен от ободка в сторону от оси вращения ротора в плоскости симметрии соответствующего ободка, выступы расположены через 90o по окружности ободков, в одной паре выступы расположены через 180o друг от друга, размеры ободков, кассы выступов и расстояния их центров масс от оси вращения ротора выполнены такими, чтобы динамические и статические моменты дисбаланса ротора вместе с ободками, выступами и рамкой подвеса были минимальными, высота ободков над поверхностью ротора выполнена не менее глубины проникновения луча лазера, используемого при балансировке, в направлении действия луча перпендикулярно цилиндрической поверхности ротора, ширина ободков и выступов выполнена не меньшей диаметра пятна сфокусированного луча лазера.
Путем выполнения на роторе ободков с выступами, размеры которых обеспечивают балансировку ротора посредством лазера, достигается повышение технологичности, уменьшение трудоемкости и повышение точности балансировки ротора, так как производится удаление дозированного количества массы с выступов в точно известных по расчету местах (на выступах) на строго фиксированном расстоянии удаляемого количества массы от оси вращения ротора.
Устраняемое при этом влияние одного вида балансировки на результаты проведения других видов балансировки сокращает время балансировки, упрощает процесс балансировки.
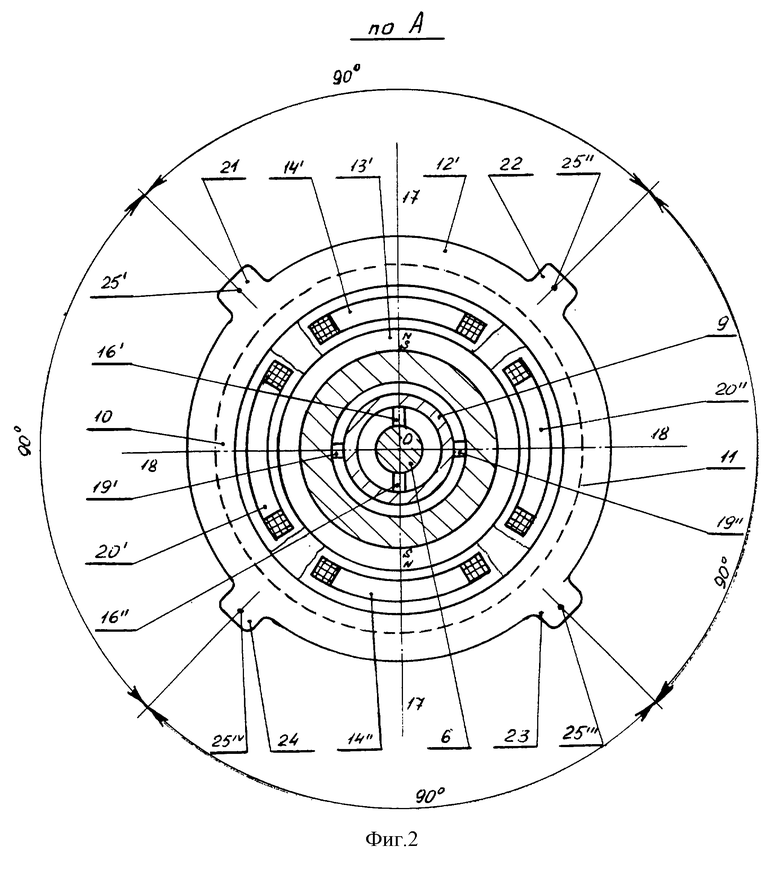
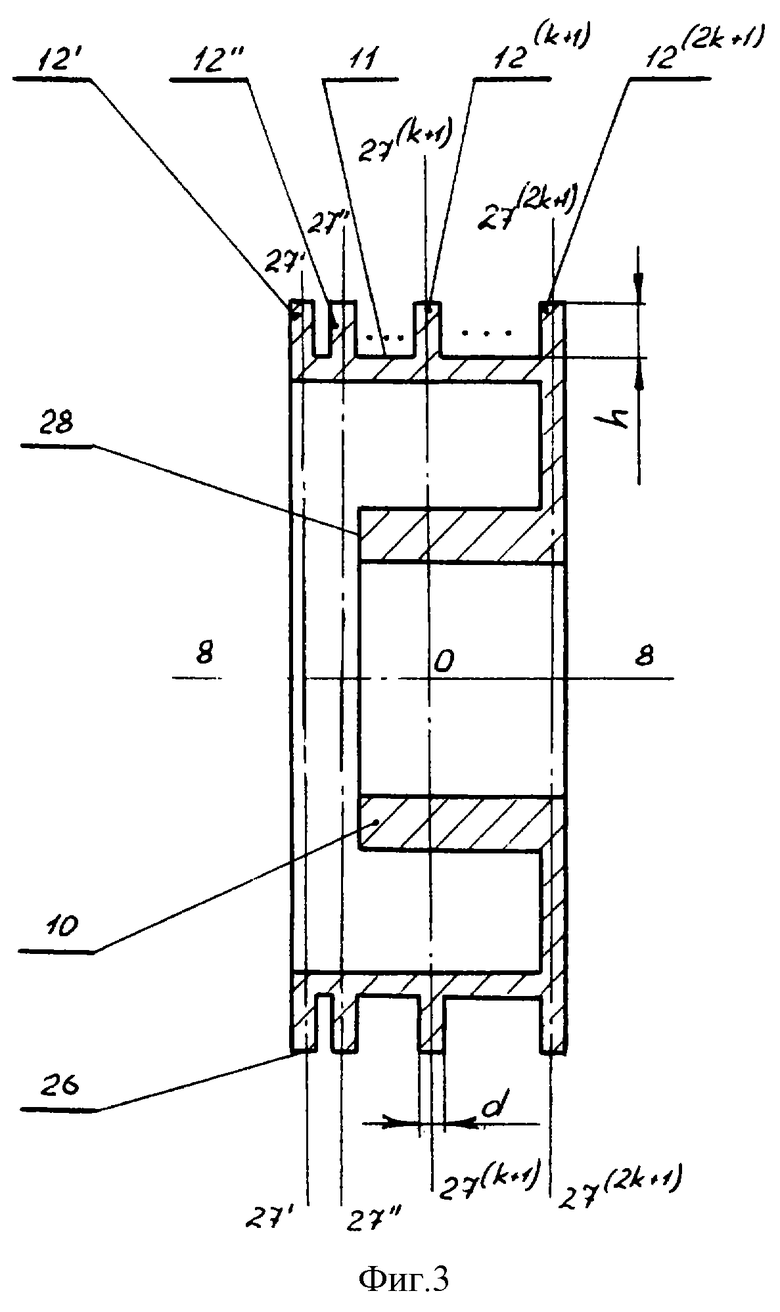
На фиг. 1 представлен общий вид гироскопа; на фиг.2 - разрез гироскопа; на фиг.3 - вид ротора гироскопа.
В гироскопе (фиг.1) в корпусе 1 с крышкой 2 и кожухом 3 установлен статор 4 гиромотора, ротор 5 которого установлен на валу 6 с подшипниками 7I и 7II, чем обеспечивается угловое движение ротора 5 гиромотора относительно оси вращения 8-8.
На валу 6 установлены рамка подвеса 9 и ротор 10. На внешней цилиндрической поверхности 11 ротора 10, образующая которой параллельна оси вращения 8-8 ротора 10, заодно с ним выполнены ободки 12I, 12II...12(k+1)...12(2k+1).
На роторе 10 установлены намагниченные в радиальном направлении кольцевые постоянные магниты 13I, 13II. На корпусе 1 закреплены компенсационные катушки 14I, 14II первого датчика момента и П-образные магнитные системы 15I, 15II одного из датчиков угла индуктивного типа, содержащие сердечник в обмотку.
Путем соединения рамки подвеса 9 (фиг.2) с помощью торсионов 16I, 16II с валом 6 образована первая ось подвеса 17-17 ротора 10, вторая ось подвеса 18-18 которого образована торсионами 19I, 19II, соединяющими ротор 10 с рамкой подвеса 9. В корпусе 1 закреплены компенсационные катушки 20I, 20II, второго датчика момента и магнитные системы второго из датчиков угла, выполненные аналогично магнитным системам 15I, 15II и расположенные по той же оси, что и компенсационные катушки 20I, 20II.
Первая ось подвеса 17-17 и вторая ось подвеса 18-18 расположены в одной плоскости и пересекаются в центре 0 на оси вращения 8-8 ротора 10.
Взаимным расположением магнитных систем 15I, 15II первого датчика угла и компенсационных катушек 20I, 20II второго датчика момента образована первая измерительная ось гироскопа.
Компенсационные катушки 14I, 14II первого датчика момента и расположенные по одной оси с ними магнитные системы второго датчика угла образуют вторую измерительную ось гироскопа.
На ободке 12I заодно с ним выполнены выступы 21, 22, 23, 24, центры масс 25I, 25II, 25III, 25IV которых расположены от ободка 12I в сторону от оси вращения 8-8 ротора 10.
Выступы 21, 22, 23, 24 расположены по окружности внешней цилиндрической поверхности 11 ротора 10 на угловых расстояниях 90o друг от друга. В одной паре выступы 21, 23 расположены через 180o друг от друга, в другой пере выступы 22, 24 также расположены через 180o.
На ободке 12II образованы аналогично выполненные выступы 21I, 22I, 23I, 24I соответственно на ободке 12(2k+1) - выступы 21(2k), 22(2k), 23(2k), 24(2k).
На роторе 10 (фиг.3) у ободков 12I, 12II...12(k+1)... 12(2k+1), образующие поверхности 26 параллельны оси вращения 8-8 ротора 10. Плоскости симметрии 27I-27I, 27II-27II. ..27(k+1)...27(2k+1) соответственно ободков 12I, 12II...12(k+1)...12(2k+1) перпендикулярны оси вращения 8-8 ротора 10. Плоскость симметрии 27(k+1)-27(2k+1) проходит через точку 0 центра пересечения первой оси подвеса 17-17 и второй оси подвеса 18-18. Плоскость симметрии 27I-27I ободка 12I и плоскость симметрии 27(2k+1)-27(2k+1) ободка 12(2k+1) расположены по разные стороны от точки 0 симметрично относительно друг друга. Аналогично попарно симметрично относительной точки 0 расположены ось симметрии 27II-27II ободка 12II и ось симметрии 27(2k)-27(2k) ободка 12(2k) и т.д.
Центры масс 25I, 25II, 25III, 25IV выступов 21, 22, 23, 24 расположены в плоскости симметрии 27I-27I ободка 12. Центры масс выступов ободков 12II... 12(k+1) . . . 12(2k+1) расположены в соответствующих плоскостях симметрии 27II-27II, ... 27(k+1)-27(k+1)...27(2k+1)-27(2k+1).
Ротор 10 выполнен из магнитомягкого материала. Магнитная система 15I, 15II первого датчика угла и аналогично выполненные магнитные системы второго датчика угла расположены напротив торцевой поверхности 28 ротора 10. Высота h ободков 12I, 12II...12(k+1)...12(2k+1) над цилиндрической поверхностью 11 ротора 10 выполнена не менее глубины проникновения луча используемого при балансировке лазера, например, импульсного твердотельного лазера на кристалле аллюмо-иттриевого граната, обеспечивающего максимальную глубину обработки до 1,5 мм по стали при направлении действия луча перпендикулярно цилиндрической поверхности 11 роторе 10.
Ширине d ободков 12I, 12II...12(k+1)...12(2k+1) и выступов 21, 21I... 21(2k), 22, 22I. ..22(2k), 23, 23I...23(2k), 24, 24I...24(2k) на них соответственно выполнена не меньшей диаметра пятна сфокусированного лазерного луча, составляющего 0,3 мм для вышеуказанного лазера.
Гироскоп работает следующим образом. В качестве чувствительного элемента индикаторного гиростабилизатора гироскоп посредством первого датчика угла с магнитными системами 15I, 15II измеряет угол отклонения гиростабилизированной платформы от положения, заданного ротором 10 гироскопа, относительно первой измерительной оси. Угол отклонения по второй измерительной оси измеряется вторым датчиком угла.
В гироскопе как датчик угловой скорости при наличии угловой скорости по первой измерительной оси первый датчик угла с магнитными системами 15I, 15II выдает сигнал отклонения ротора 10 от начального положения. Сигнал с первого датчика угла усиливается и подается не компенсационные катушки 20I, 20II второго датчика момента, создаваемым моментом которого ротор 10 возвращается в начальное положение. Ток компенсационных катушек 20I, 20II является мерой угловой скорости по первой измерительной оси гироскопа. Аналогичным образом при использовании второго датчика угла и компенсационных катушек 14I, 14II первого датчика момента измеряется угловая скорость по второй измерительной оси.
При статической балансировке осевого дисбаланса удаление масс с ротора 10 лучом лазера в направлении луча перпендикулярно цилиндрической поверхности 11 ротора 10 производится начиная с выступов 21, 22, 23, 24 на ободке 12I вплоть до выступов 21(k-1), 23(k-1), 24(k-1) на ободке 12(k) или начиная с выступов 21(2k), 22(2k), 23(2k), 24(2k) на ободке 12(2k+2) вплоть до выступов 21(k+1), 22(k+1) 23(k+1), 24(k+1) на ободке 12(k+2) в зависимости от знака момента дисбаланса. При этом, чем больше величина осевого дисбаланса, тем на наиболее удаленных от точки 0 на оси вращения 8-8 ободках производится удаление наибольших масс с выступов.
При статической балансировке радиального дисбаланса удаление масс производится с выступов 21(k) или 23(k), 22(k) или 24(k) ободка 12(k+1) в зависимости от углового положения микрообъема с наибольшей плотностью в роторе 10 с рамкой подвеса 9. При большой величине радиального дисбаланса удаление масс производится с аналогично ориентированных выступов на ближайших к ободку 12(k+1) ободках на роторе 10.
При динамической балансировке удаление масс производится с выступа 21 на ободке 12I и c выступа 23(2k) на ободке 12(k+1) или с выступа 23 на ободке 12I и с выступа 21(2k) на ободке 12(k+1), с выступа 22 на ободке 12I и с выступа 24(2k) на ободке 12(k+1) или с выступа 24 на ободке 12I и с выступа 22(2k) на ободке 12(k+1) в зависимости от фазы положения вдоль оси вращения 8-8 микрообъема с наибольшей плотностью в роторе 10 с рамкой подвеса 9. При меньших величинах динамического дисбаланса удаление масс производится с аналогично ориентировочных выступов на ободках, расположенных симметрично относительно друг друга ближе к ободку 12(k+1). При выполнении выступов 21, 21I. . . 21(2k), 22, 22I. . .22(2k), 23, 23I...23(2k), 24, 24I...24(2k) на ободках 12I, 12II...12(2k+1) достигается большее изменение статических и динамических моментов при минимальном изменении масс выступов при балансировке на увеличенном на высоту h ободков расстоянии центров масс выступов от оси вращения 8-8. Кроме того ободки 12I, 12II...12(2k+1) защищают от прожигания лучом лазера ротор 10 и обеспечивают прочность устройства балансировки гироскопа, испытывающим значительные центробежные силы при высокой скорости вращения ротора 5 гиромотора.
Выполнением выступов и ободков 12I, 12II...12(2k+1) заодно с ротором 10 достигается стабильность размеров устройства балансировки гироскопа за счет устранения перемещаемых масс, в результате чего обеспечивается повышение точности балансировки ротора 10.
Выполнением размеров h и d ободков 12I, 12II...12(2k+1), размеров и масс выступов 21, 21I...21(2k), 22, 22I...22(2k), 23, 23I... 23(2k), 24, 24I... 24(2k) и расстояний их центров масс от оси вращения 8-8 достигается то, что в результате балансировки обеспечиваются минимальные статические и динамические моменты дисбаланса ротора 10 с рамкой подвеса 9.
Источники информации
1. Д. С. Пельпор, В.А.Матвеев, В.Д.Арсеньев. Динамические настраиваемые гироскопы. М., "Машиностроение", 1988 г., стр. 229-233.
2. Патент Франции 2322366, кл. G 01 М 1/20. Вращающиеся, динамически настраивающиеся устройства, образующие гироскопы и акселерометры. 1976 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП | 2001 |
|
RU2197715C1 |
| ГИРОСКОП | 2001 |
|
RU2210733C2 |
| ГИРОСКОП | 2002 |
|
RU2210735C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |
| ГИРОСКОП | 2002 |
|
RU2215261C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ, УСТАНОВЛЕННОГО НА УПРАВЛЯЕМУЮ В АЗИМУТЕ И СТАБИЛИЗИРОВАННУЮ В ПЛОСКОСТИ МЕСТНОГО ГОРИЗОНТА ПЛАТФОРМУ | 2002 |
|
RU2210740C1 |
| ГИРОСКОП | 2005 |
|
RU2298151C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ ПРИ ЛИНЕЙНОМ ДВИЖЕНИИ ОБЪЕКТА | 2002 |
|
RU2210741C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ И КОМБИНИРОВАННОЙ КОМПЕНСАЦИИ ЕГО ДРЕЙФА | 2001 |
|
RU2189564C1 |
Изобретение относится к области измерительной техники, а именно к гироскопическим преобразователям инерциальной информации. Техническим результатом изобретения является повышение технологичности, уменьшение трудоемкости и повышение точности балансировки ротора гироскопа. Данный технический результат достигается в гироскопе, содержащем гиромотор, ротор с внутренним карданом с первой и второй осями однорамочного подвеса, датчики угла и датчики момента, причем устройства балансировки ротора выполнены на внешней цилиндрической поверхности ротора в виде выполненных заодно с ним ободков, на каждом из которых расположены две пары выступов. 3 ил.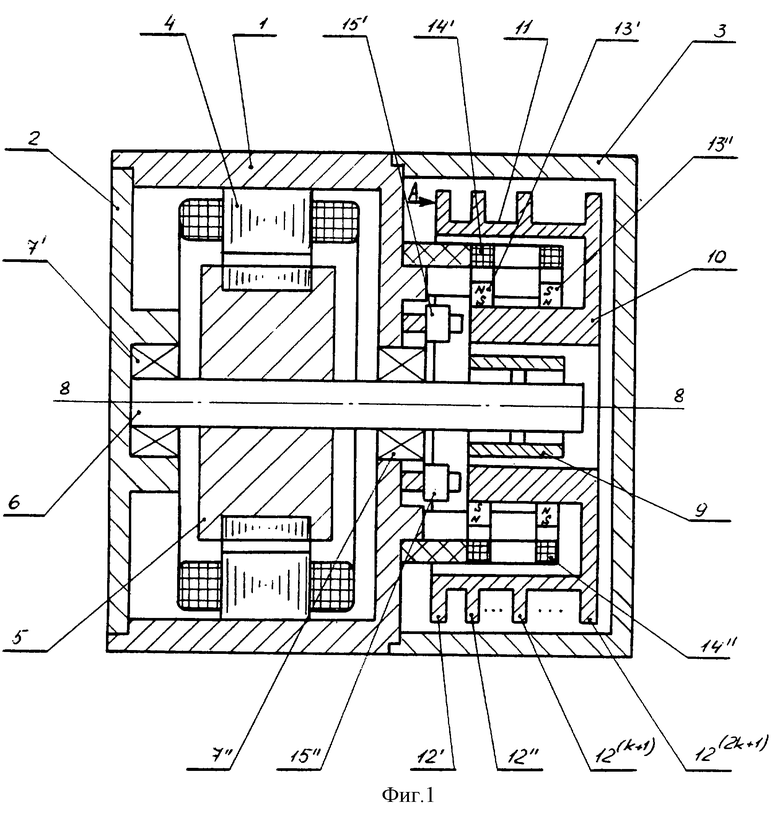
Гироскоп, содержащий гиромотор, ротор с внутренним карданом с первой и второй осями однорамочного подвеса, датчики угла и датчики момента по первой и второй измерительным осям, устройства балансировки ротора, отличающийся тем, что устройства балансировки ротора выполнены на внешней цилиндрической поверхности ротора, образующая которого параллельна его оси вращения, в виде выполненных заодно с ротором 2k+1 ободков, образующие поверхности которых параллельны оси вращения ротора, а плоскости симметрии ободков перпендикулярны оси вращения, ободки расположены так, что плоскость симметрии одного ободка проходит через центр пересечения первой и второй осей подвеса, плоскости симметрии других ободков расположены симметрично попарно по разные стороны от центра пересечения первой и второй осей подвеса, на каждом ободке образованы выполненные заодно с ними две пары выступов так, что центр масс каждого выступа расположен от ободка в сторону от оси вращения ротора в плоскости симметрии соответствующего ободка, выступы расположены через 90o по окружности ободков, в одной паре выступы расположены через 180o друг от друга, высота ободков над поверхностью ротора выполнена не менее глубины проникновения луча лазера, используемого при балансировке, в направлении действия луча перпендикулярно цилиндрической поверхности ротора, ширина ободков и выступов выполнена не меньше диаметра пятна сфокусированного луча лазера.
| ШАССИ С ПРИВОДОМ ДЛЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ, В ЧАСТНОСТИ ПОВОРОТНЫХ ТЕЛЕЖЕК ДЛЯ НИЗКОРАМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2322366C1 |
| УПРУГИЙ КАРДАНОВЫЙ ПОДВЕС ГИРОСКОПА | 1995 |
|
RU2093793C1 |
| Устройство для динамической балансировки лучом лазера роторов | 1982 |
|
SU1043499A1 |
| US 4126046 A, 21.11.1978 | |||
| US 4269072 A, 26.05.1981 | |||
| Инфузионный прибор для управления инъекционными шприцами | 1979 |
|
SU969274A1 |

