Изобретение относится к захватным устройствам и может быть использовано в конструкциях манипуляторов и роботов для их работы с деталями П-образной формы.
Наиболее близким техническим решением является магнитный схват, содержащий корпус, выполненный из немагнитного материала, несколько постоянных магнитов, установленных в нем, устройство для отрыва деталей от магнита. Часть магнитов выполнена с возможностью продольного регулировочного перемещения. Все магниты размещены в нижней части корпуса. Устройство для отрыва деталей от магнита выполнено в виде втулки, через основание связанной с рукой робота, и горизонтальных упоров для контакта с платформами, на которых закреплены магниты. Они смонтированы на руке с возможностью вертикального перемещения.
Недостатком этой установки является ее сложность, невозможность использования в штамповочном производстве.
Изобретение решает задачу упрощения конструкции схвата с постоянными магнитами, уменьшение его габаритов для обеспечения возможности использования в штамповочном производстве.
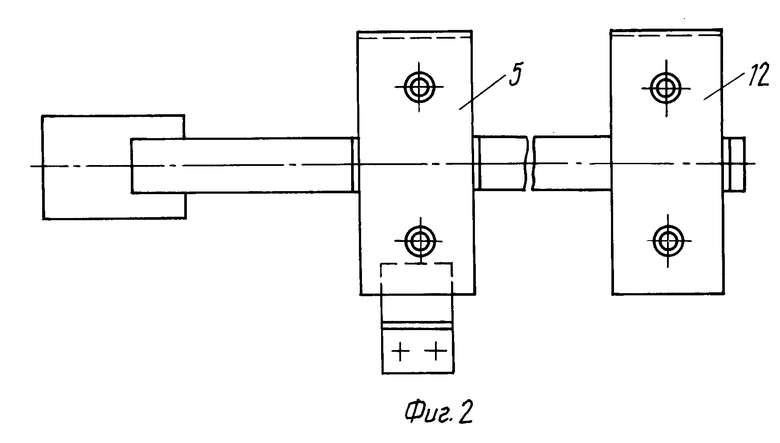
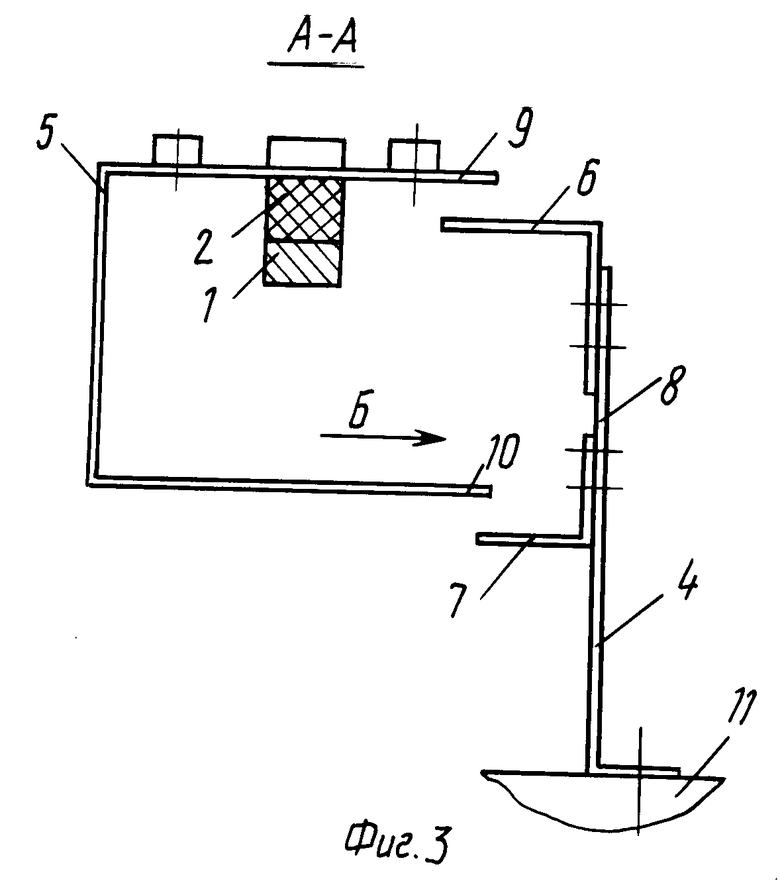
На фиг.1 изображено предлагаемое устройство, общий вид; на фиг.2 то же, вид сверху; на фиг.3 разрез А-А на фиг.1; на фиг.4 вид по стрелке Б на фиг. 3.
Комплексное устройство для захвата и сброса деталей содержит магнитный схват и устройство для отрыва деталей от магнита. Магнитный схват закреплен на руке робота, а устройство отрыва деталей от магнита смонтировано на столе пресса, на котором также установлены два штампа.
Магнитный схват имеет корпус из немагнитопроводного материала, выполненный в виде рейки 1, два постоянных магнита 2, закрепленных сверху в пазах рейки 1. Рейка 1 через фланец 3 прикреплена к руке робота. Магниты 2 разнесены на рейке 1 на расстояние, равное шагу между штампами.
Устройство для отрыва деталей выполнено в виде Г-образного кронштейна 4 из немагнитного материала, расположенного в зоне сброса детали 5 в тару. Упор для отрыва деталей выполнен в виде горизонтальной полки 6 и выступа 7, закрепленных на вертикальной стойке 8, находится в зоне прохода детали 5 под ее стенками 9 и 10. Кронштейн 4 закреплен на столе 11 пресса. В зоне действия правого магнита размещена заготовка 12 детали.
Комплексное устройство для захвата и сброса деталей, установленное, например в робото-технологической линии, в составе которой имеется пресс с двумя штампами, на которых одновременно выполняются две технологические операции, работает следующим образом.
Рука робота, находясь в нижнем положении перемещает рейку 1 вправо. В крайнем правом положении рейки правый магнит находится в правом штампе под заготовкой 12, а второй магнит в левом штампе под готовой деталью 5. При подъеме руки робота магниты 2 одновременно захватывают заготовку 12 и готовую деталь 5 и поднимают их выше зеркала штампов. После перемещения руки робота влево заготовка 12 находится над матрицей левого штампа, а деталь 5 над тарой. При опускании руки робота заготовка 12 укладывается на матрицу левого штампа и при дальнейшем движении руки отрывается от магнита, а готовая деталь, соприкасаясь стенками 9 и 10 с полкой 6, уступом 7 и стойкой 8, поворачивается против часовой стрелки вокруг рейки 1, отрывается от магнита и сбрасывается в тару. Затем цикл повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ ДЕРЖАТЕЛЬ | 1992 |
|
RU2072908C1 |
| СТАНОК ДЛЯ РЕЗКИ ЛИСТОВОГО МАТЕРИАЛА | 1992 |
|
RU2016720C1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Робототехнологический комплекс для сборки | 1990 |
|
SU1782203A3 |
| Магнитный схват | 1990 |
|
SU1811484A3 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Магнитный схват | 1986 |
|
SU1430283A1 |
| Устройство для ориентации деталей | 1990 |
|
SU1838073A3 |
Изобретение может быть использовано в конструкциях роботов для их работы с деталями П-образной формы. Сущность изобретения: схват содержит выполненный в виде рейки 1 корпус из немагнитопроводного материала, постоянные магниты 2. Магниты 2 расположены в пазах рейки 1. Устройство для отрыва деталей от магнита выполнено в виде Г-образного кронштейна 4 из немагнитного материала и расположено в зоне удаления деталей в тару. При движении схвата в зоне удаления деталей вниз деталь 5 задевает за конец горизонтальной полки и поврорачивается вокруг магнита. При этом деталь 5 соприкасается с выступом кронштейна 4, отрывается от магнита и падает в тару. 4 ил.
КОМПЛЕКСНОЕ УСТРОЙСТВО ДЛЯ ЗАХВАТА, ПЕРЕНОСА И СБРОСА ДЕТАЛЕЙ, содержащее магнитный схват робота с корпусом из немагнитопроводного материала с установленными на нем постоянными магнитами, а также упор для отрыва деталей от магнитов, отличающееся тем, что схват выполнен в виде рейки с пазами, в которых установлены магниты, а упор для отрыва деталей установлен в зоне сброса деталей и выполнен в виде Г-образного кронштейна из немагнитного материала, длинная сторона которого закреплена вертикально и снабжена выступом, при этом короткая горизонтальная сторона кронштейна и упомянутый выступ имеют возможность взаимодействия с деталью.
| Магнитный схват | 1985 |
|
SU1348169A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
