Изобретение относится к машиностроению и может быть использовано в мани- ну.чяторах различного назначения, преимущественно в установках для термохимического снятия заусенцев с пластин роторов и статоров электрических манаин.
Целью изобретения является рас1пирение технологических возможностей за счет обес- иечения перехвата изделия.
На фиг. 1 изображен схват в момент захвата изделия; на фиг. 2 - то же, в момент подъема изделия; на фиг. 3 - то же, в момент сброса изде.:1ия; на фи1 . 4 - вид А на фиг. 3.
Магнитный схват содержит по крайней мере luecTb постояиных магнитов 1, три из которых установлены в корпусах 2, выполненных из немагнитопроводного материала с возможностью продольного регулировочного перемещения, а остальные магниты 3 жестко связаны с корпусами 4. Кроме того, схват содержит три втулки 5, в которых ус- тановлены с возможностью продольпого не- ремеп1ения корпуса 2, ось 6, жестко связанную с основанием 7, в котором выполнены радиальные пазы 8, и две платформы (первая 9, вторая 10), свободно установленные на оси 6 и имеющие соответственно радиа.тьные пазы II и 12. В пазах 11 с возможностью радиального перемещения и фиксации установлены корпуса 2 регулируемых магнитов, а в пазах 12 с возможностью радиального перемещения и фиксации установлены корпуса 4 нерегулируемых магнитов. Рабочие новерхпости всех корпусов магнитов вьпюлпены коническими. Позицией 13 и 14 обозначены упоры соответственно в месте захвата и в месте сброса изделия 15.
Схват )аботает с,1едующим образо.м.
Л анипулятор, держа схват за ось 6, опускает его на стопку тонколистовых из- дели11 15j например пластин ротора и статора электрических машин (фиг. 1). Вторая платформа 10 опирается на упор 13, и при дальнейп1ем ходе вниз манипулятора происходит захват изделия 15 постоянными маг- нигами 1. При этом должно быть выставлено такое осевое положение этих магнитов в корпусах 2, при котором схват будет брать только одно изделие 15 из стопки.
Загем нроисхсхтит перехват изделия 15 с магнитов 1 на ма1 ниты 3 нри ходе вверх
5
0
манипулятора (фиг. 2). Магниты 3 расположены в корпусах 4 в самом нижнем положении, что обеспечивает максимальную силу нрижатия изделия 15 к конической поверхности этих корпусов.
После этого манипулятор опускает схват с изделием 15 в травильную ванну и промывочные ванны и пере.меп1.ает его на место сброса (фиг. 3). При этом манипулятор опускает схват и первая платформа 9 ложится на упоры 14. Платформа 10 ложится на платфор.му 9, и при дальнейн1ем ходе оси 6 происходит передвижение основания 7 и подвижных втулок 5 относительно корнусов 2. Вту.чки 5 своим торцом сталкивают изделие 15.
Для настройки схвата на конкретное
изделие 15 корпуса
передвигаются ветственно.
и 4 и в иазах 8, II и
втулки ;: 12 соот0
0 5
5
0
5
Формула изобретения
Магнитный схват, содержащий связанный с основание.м постоянный магнит, установленный в корпусе, вынолненном из пе- магнитопроводного материала с возможностью продольного регулировочного переме- П1ения, отличающийся тем, что, с целью расщиреиия технологических возможностей за счет обеспечения перехвата изделия, он снабжен но крайней мере пятью дополпи- тельными постоянными магнитами, установленными в кориусах. два из которых установлены с возможностью регулировочного перемещения, тремя втулками, в которых с воз.можностью продольного переменгения установлены корнуса регулируемых магнитов., осью, один конец которой жестко связан с основанием, и двумя установленными на оси нлатформами с радиальными назами, при этом в основании также вьнюлнены радиа.пь- ные назы, в которых с возможностью радиального перемещения установлены втулки, а в пазах первой ктатформы, расположенной над основанием, и в пазах второй платформы, расположенной над первой платформой, установлены с возможностью радиального пере.мещения и фиксации соответственно корпуса регулируемых и нерегулируемых постоянных магнитов, причем рабочие новерхпости корпусов всех магнитов вынолнены коническими.
Г±
Kxvvv
V///.
/J
rf
к
-XXXXVM
§
5 -2
Фиг. 2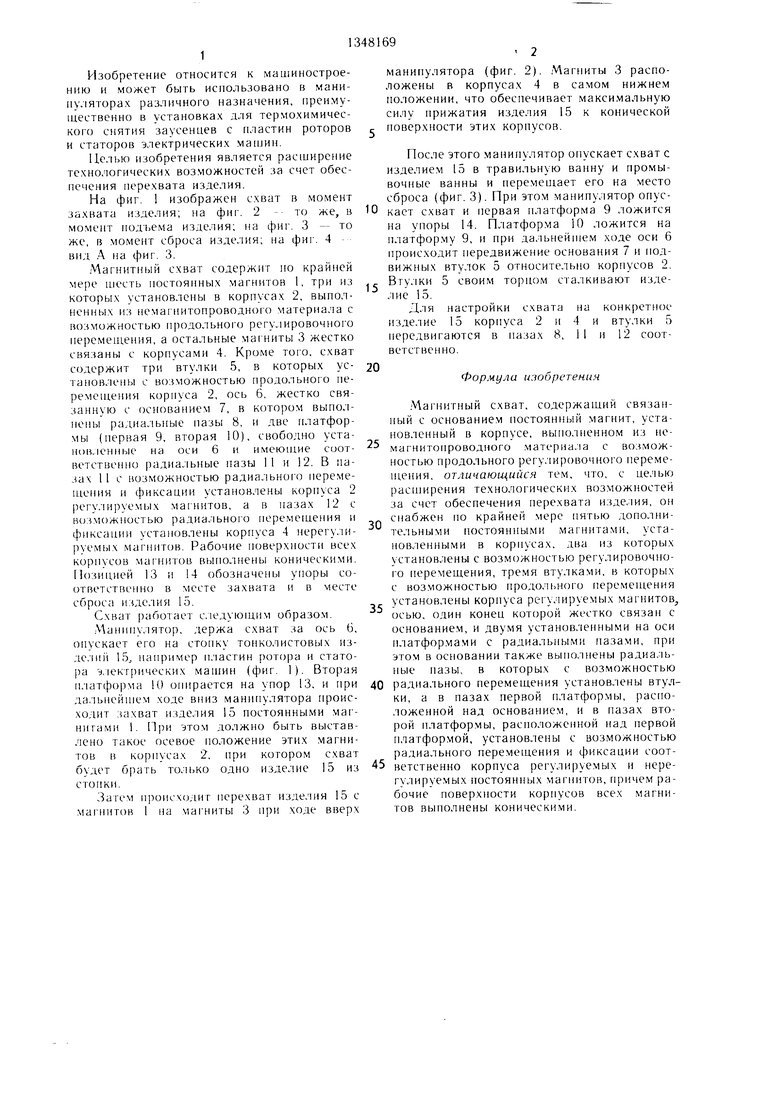
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНОЕ УСТРОЙСТВО ДЛЯ ЗАХВАТА, ПЕРЕНОСА И СБРОСА ДЕТАЛЕЙ | 1993 |
|
RU2041055C1 |
| Захватный комплекс | 1988 |
|
SU1684024A1 |
| Магнитный схват | 1986 |
|
SU1430283A1 |
| Установка для жидкостной обработки изделий | 1984 |
|
SU1206339A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ ЭЛЕКТРОННОЙ ТЕХНИКИ | 1992 |
|
RU2034362C1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1985 |
|
SU1301529A2 |
| Манипулятор | 1985 |
|
SU1268413A1 |
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1698159A1 |
| Машина для набора комплектов печатной продукции | 1988 |
|
SU1676980A1 |
| Манипулятор | 1983 |
|
SU1151450A1 |

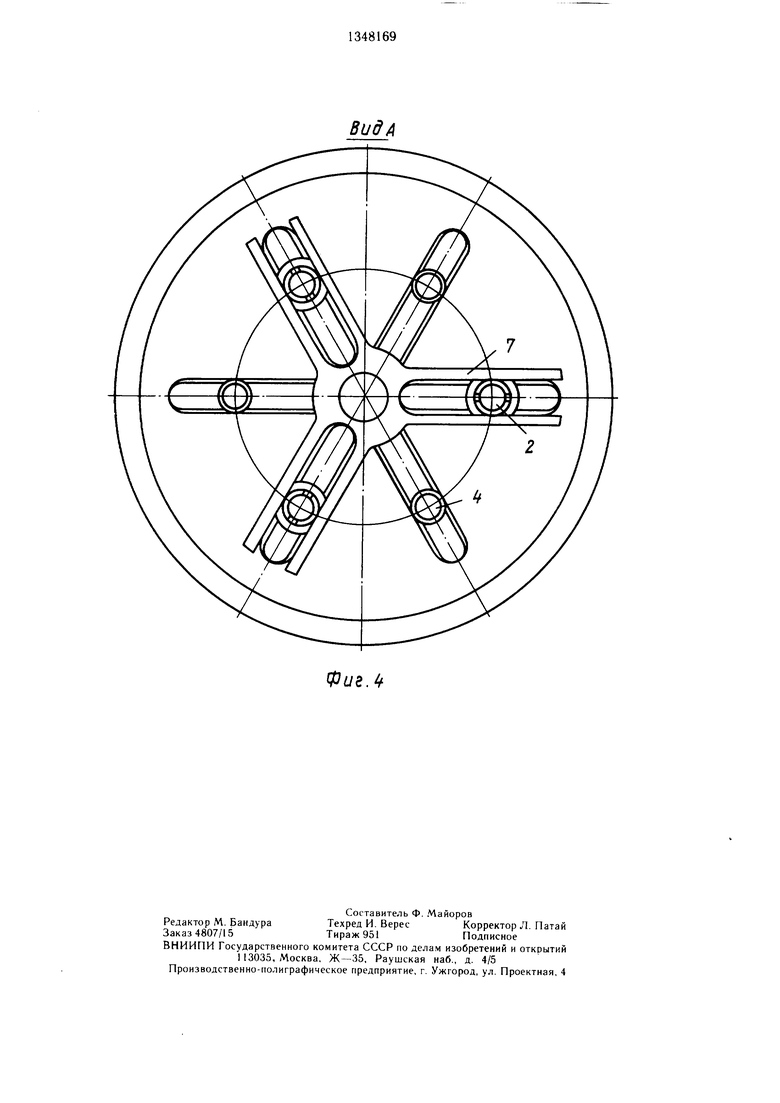
Изобретение относится к ма 11инострое- нию и может быть использовано в манипуляторах различного назначения, преимущественно в установках для термохимического снятия заусенцев с пластин роторов и статоров электрических машин. Целью изобретения является расширение технологических возможностей за счет обеспечения перехвата изделия. При опускании схвата за ось 6 на стопку изделий 15 п.чатфор- ма 10 опирается на упор 13 и при дальнейшем опускании происходит захват изделия постоянными магнитами 1. расположенными в корпусах 2 с возможностью продольного регулировочного перемещения для захвата требуемого количества изделий. Затем при подъеме схвата происходит перехват изделия 15 с магнитов I па .магниты 3, и при опускании схвата после переноса изделия происходит взаимодействие платформы 9 с упором 14, что приводит к отделению изделия от .магнитов с помощью ВТУЛОК 5, установленных на основании 7. 4 ил. § (Л f со 4:: оо о:) со Фиг.1
rf.
RVvVx
t//
Ю
/
М 5
- / --
//rf
/4
S7
2
ue.3
ВидА
Фиг.
| Система определения фактических параметров проезжей части | 2017 |
|
RU2683618C1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ТЕРМИОННАЯ ЛАМПА | 1920 |
|
SU294A1 |
