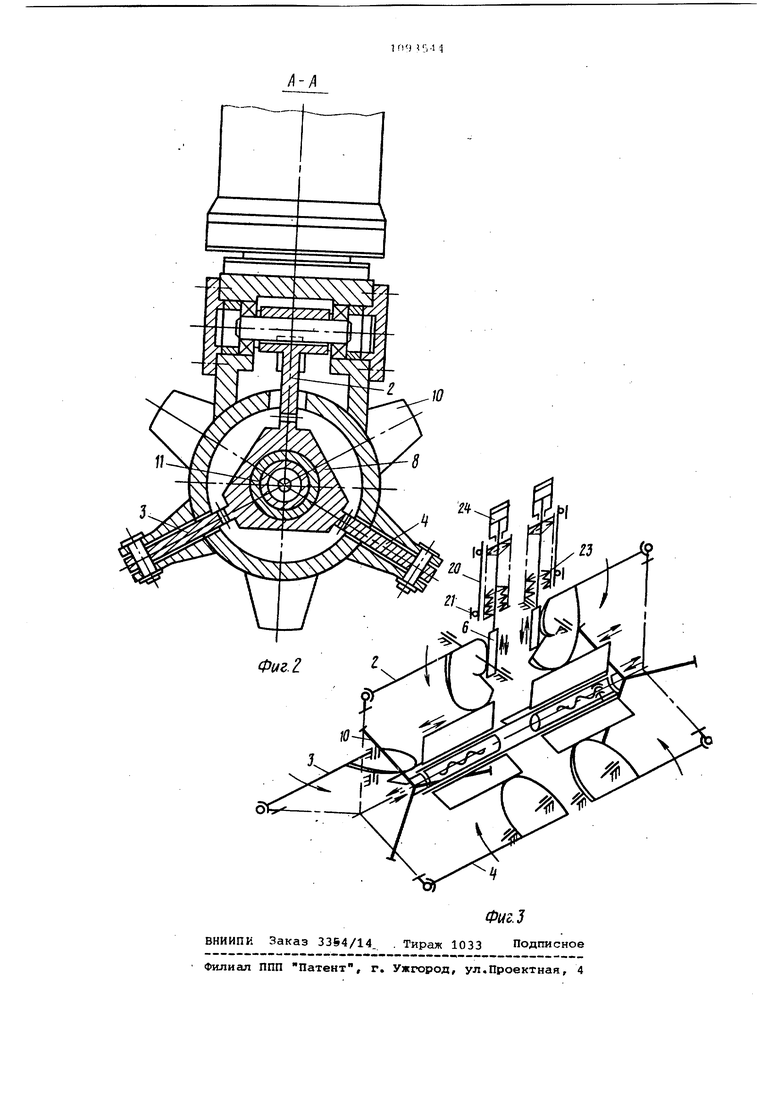
Изобретение относится к маишностроению и может быть использовано в промышленных роботах, предназначенных для автоматизации технологических процессов различных отраслей .промыишенности. Известно манипулирующее устройст во, содержащее корпус, захватные рычаги с приводом и упор со сфериче кой опорной поверхностью, смонтированный с возможностью самоустановки и расположенный между захватными рычагами Г1. Недостатком известного устройства является отсутствие регулирования упора в продольном направлении что ограничивает габаритные размеры загружаемых заготовок по длине и сужает технологические возможности устройства. Цель изобретения - расширение его технологических возможностей. Указанная цель достигается тем, что манипулирующее устройство, содержащее корпус, захватные рычаги с приводом и упор со сферической опорной поверхностью, смонтированный с возможностью самоустановки и расположенный между захватными рычагами, снабжено жестко связанной с корпусом полой скалкой, ползуном размещенным в скалке с возможностью осевого перемещения, и винтовой парой, гайка которой жестко связана с корпусом, а винт смонтирован в ползуне, при этом упор установлен с возможностью контактирования своей сферической поверхностью с наруж ным торцом ползуна и подпружинен относительно него. На фиг. 1 изображено манипулирую щее устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1;на фиг. 3 - кинематическая схема манипулирующего устройства. Манипулирующее устройство содержит корпус 1 с двумя идентичными по конструкции захватными органами каждый из которых имеет три рычага 2- 4 с зубчатыми секторами, причем рычаг 2 выполнен с дополнительным зубчатым сектором 5, входящим в зацепление с рейкой б, соединенной с тягой 7 привода. Два других рычага 3и 4 кинематически связаны с центральной рейкой 8, которая входит в зацепление со всеми рычагами (фиг. 2), являясь ведомой для рычаг 2 и ведущей для рычагов 3 и 4. Для базирования заготовок 9 по торцу в корпусе 1 установлен упор 10, свя занный с ползуном 11 с помощью пол гайки 12 и упругого элемента 13. Поверхность упора 10, контактирующ с ползуном 11, выполнена со сферическим торцом 14, Упор 10 установл с возможностью перемещения в полой скалке 15 посредством взаимодейств винта 1.6 с гайкой 17, жестко связа ной с корпусом 1 CTonopHiJM винтом 18. Рычаги 2-4 снабжены подпружиненными губками 19. Корпус 1 манипулирующего устройства с двумя захватными органами закреплен на шпинделе 20, установленном на опорах 21 в стакане 22 с возможностью поворота вокруг вертикальной оси. В шпинделе 20 размещены тяги 7 с пакетами тарельчатых пружин 23, а приводом для разжима являются силовые гидроцилиндры 24,, закрепленные на верхнем торце шпинделя 20. Штоки силовых цилиндров 24 взаимодействуют с тягами 7 и рейками 6. Манипулирующее устройство работает следующим образом. При поступательном движении робота к магазину (не показан для захвата заготовки в верхнюю полость одного из силовых цилиндров 24 захватного органа подается давление. Шток силового цилиндра 24 движется вниз и сжимает пакет тарельчатых пружин 23. Движение штока через тягу 7 и рейку б, зубчатый сектор рычага 2 передается на .центральную рейку 8, которая перемещается влево по полой скалке 15 и раскрывает рычаги 2-4. В конце поступательного хода устройства упор 10 упирается в торец заготовки 9, движение прекращается.Верхняя полость цилиндра 24 сообщается со сливом, пакет тарельчатых пружин 23 распрямляется и перемещает тягу 7 вверх, а кинематически связанную с ней центральную рейку 8 - вправо. Рычаги 2-4 синхронно сходятся к центру, губки 19 благодаря шарнирному креплению устанавливаются по поверхности заготовки 9 и зажимают ее. Усилие зажима пропорционально силе сжатого пакета пружин 23. Затем робот поступательно движется к патрону станка. Отдельным приводом (не показан ) производится поворот шпинделя 20 на угол 180° относительно стакана 22. Прием обработанной детали из патрона станка другим захватным органом производится в той же последовтальности, что и при манипулировании робота у магазина. При необходимости регулировки положения заготовки 9 в устройстве в продольном направлении оператор вращением винта 16 перемещает в ту или иную сторону ползун 11. При этом упор 10, подпружиненный к торцу ползуна 11 пружиной 13, также перемещается вместе с ползуном в продольном направлении. Положение базового Торца зажатой заготовки 9 регулируется определенной глубиной установки упора 10. Предлагаемое устройство позволяет повысить точность базирования широкого диапазона по длине деталей типа втулок, дисков, фланцев.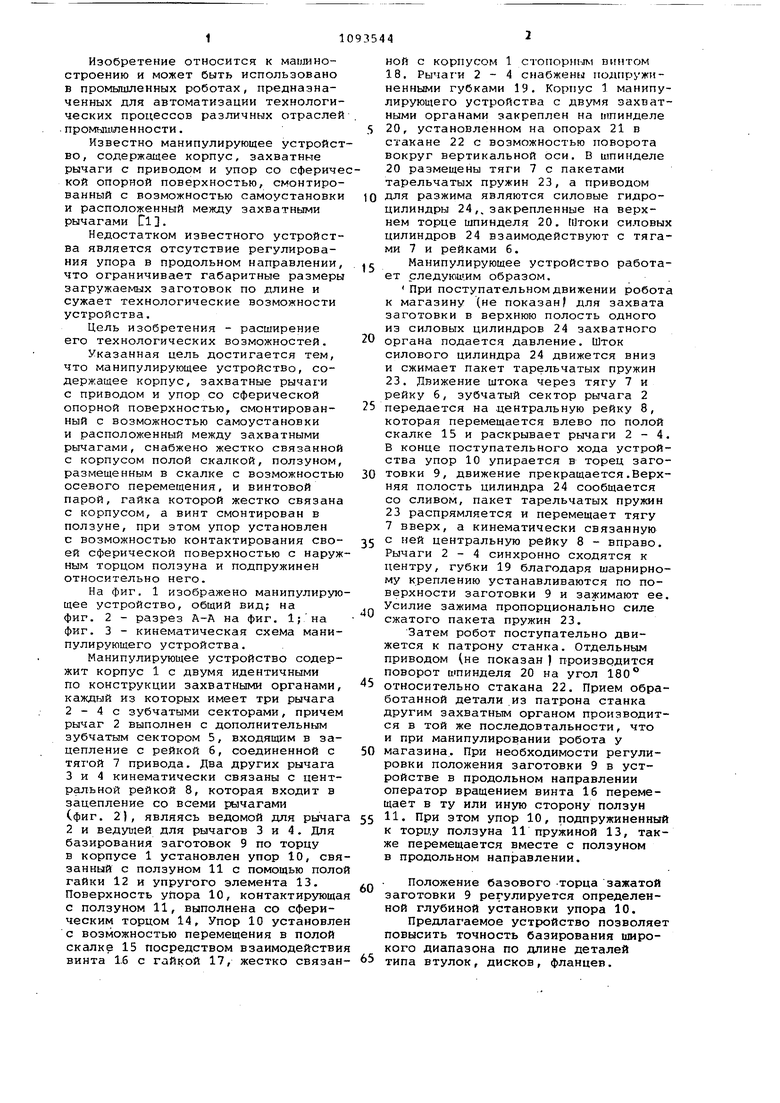
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Захватное устройство | 1986 |
|
SU1315301A1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| Устройство для подачи материала в рабочую зону пресса | 1983 |
|
SU1346305A1 |
| Захватное устройство | 1987 |
|
SU1437218A2 |
| Устройство для механизированного зажима инструмента в шпинделе металлорежущего станка | 1989 |
|
SU1685631A1 |
| САМОЦЕНТРИРУЮЩЕЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1994 |
|
RU2088396C1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Захватное устройство | 1985 |
|
SU1337251A1 |
МАНИПУЛИРУЮЩЕЕ УСТРОЙСТ содержащее корпус, захватные рыч с приводом и упор со сферической опорной поверхностью, смонтированный с возможностью самоустановки и расположенный между захватными рычагами, о тли.чающееся тем, что, с целью расширения технологических возможностей, оно снабжено жестко связанной с корпусом полой скалкой , ползуном, размещенным в скалке с возможностью осевого перемещения, и винтовой парой, гайка которой жестко связана с корпусом, а винт смонтирован в ползуне, при этом упор установлен с возможностью контактирования своей сферической поверхностью с наружным торцом ползуна и подпружинен относительно него.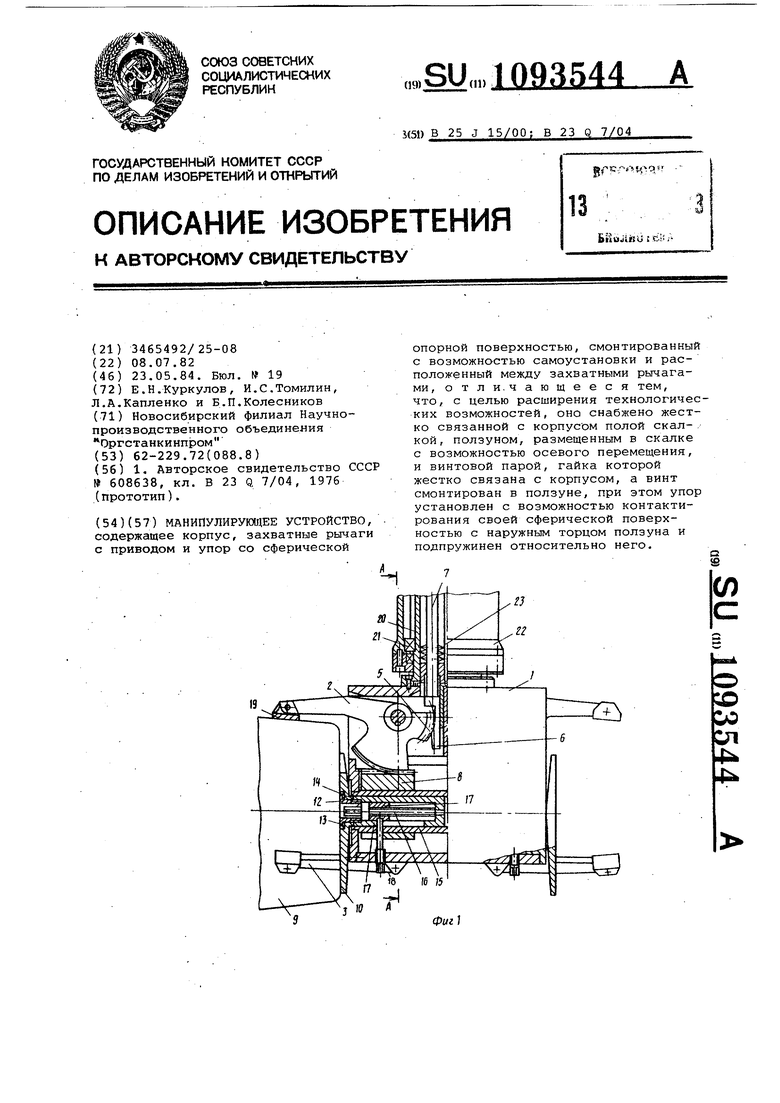
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
