Изобретение относится к машиностроению и может быть использовано в промышленных роботах для автоматизации и механизации технологических процессов.
Цель изобретения - расширение технологических возможностей за счет ус тановки пальцев на лепестковой пружинной пластине, что обеспечивает возможность захвата заготовок как за внутреннюю, так и за наружную по- ве|рхности.
: На фиг. 1 показан захват манипу- ля1гора со сведенными пальцами; на . 2 - захват с разведенными паль- цаИи, удерживающий заготовку за внут поверхностьJ на фиг. 3 - за- хв(ат со сведенными пальцами, удерживающий заготовку за наружную поверхность.
Захват манипулятора состоит из корпуса 1, прикрепленной к нему трех лёпестковой пружинной пластины 2 с опирающимися на нее пальцами, со- стоящими из звеньев 3 в виде цилиндров с пропущенными сквозь них гибкимИ тросиками 4, заделанными одними концами в конечных звеньях 5, а дйугими концами соединенных с при- водом 6..
Захват работает сле;цующим образом.
Под действием пружинной пластины 2 конечные звенья 3 пальцев сведены вместе и в таком положении пальцы захвата вводятся в отверстие заготовки 7. Затем включается привод 6, тросики 4 натягиваются, в результате чего пальцы распрямляются. Заготовка 7 оказывается закрепленной на захвате. Для захвата заготовки 8 (фиг.З) за наружную поверхность (заготовка 8 не имеет отверстия) захва манипулятора подводят к ней с разведенными пальцами, т.е. привод 6 включен. Затем привод 6 выключается, пальцы под действием лепестковой пружинной пластины 2 стремятся свестись, зажимая при этом заготовку 8 за наружную поверхность.
Формула изобретения
Захват манипулятора по авт.св. № 1033311, отличающийся тем, что, с целью расширения технологических возможностей, пальцы установлены на прикрепленной к корпусу лепестковой пружинной пластине, число лепестков которой соответствует числу пальцев, причем лепестки расположены под углом к отклоняющим поверхностям корпуса с возможностью контактирования с ней.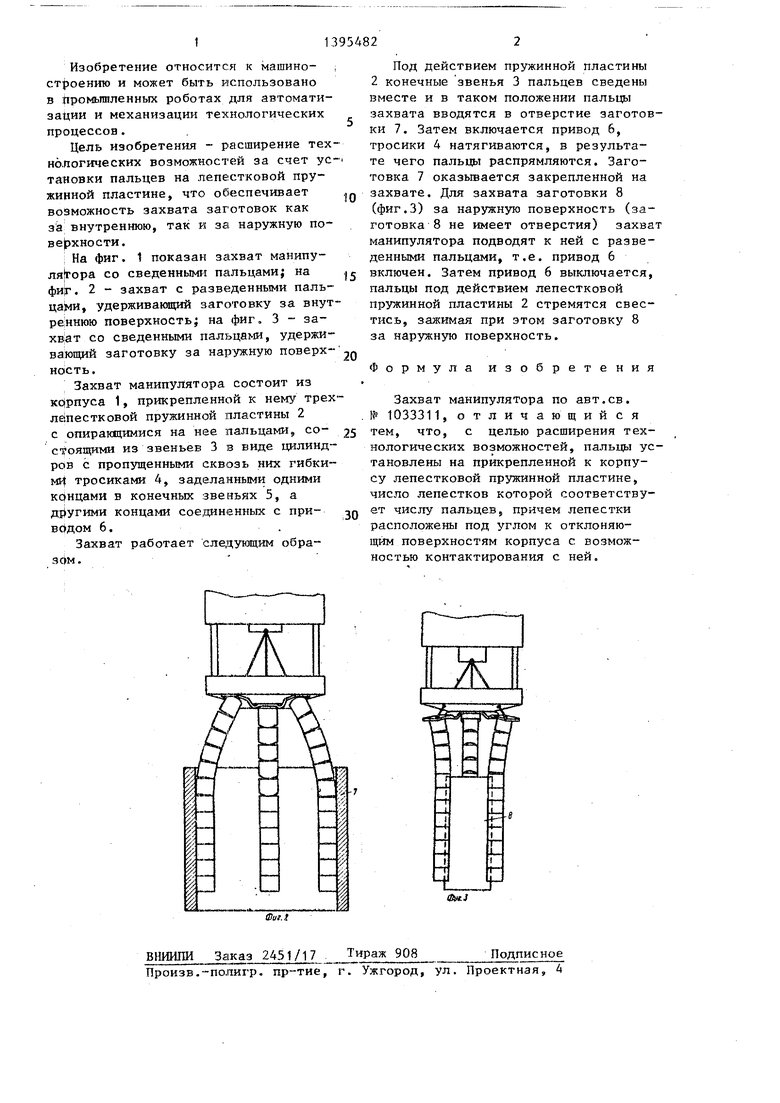
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1982 |
|
SU1033311A1 |
| Схват манипулятора | 1984 |
|
SU1202875A2 |
| Схват манипулятора | 1984 |
|
SU1202874A2 |
| Схват манипулятора | 1985 |
|
SU1240578A1 |
| Схват манипулятора | 1985 |
|
SU1268409A2 |
| Захват манипулятора | 1987 |
|
SU1445952A1 |
| Схват манипулятора | 1987 |
|
SU1553378A1 |
| Электромагнитный захватный орган | 1982 |
|
SU1050864A1 |
| Устройство для передачи заготовок из накопителя в захват манипулятора | 1986 |
|
SU1359092A1 |
| Устройство для поштучной подачи заготовок | 1986 |
|
SU1308535A1 |
Изобретение относится к машиностроению и может быть использовано в промышленных роботах для автоматизации и механизации технологических процессов. Цель - расширение технологических возможностей за счет установки пальцев на лепестковой пружинной пластине,, что обеспечивает возможность захвата заготовок как за внутреннюю, так и на наружную поверхность. Захват манипулятора содержит корпус 1, многозвенные пальцы, звенья 3 которых вьтолнены в виде цилиндра с пропущенными сквозь них гибкими тросиками 4, заделанными одними концами в конечных звеньях 3, а другими концами соединены с приводом 6. Лепестки пружинной пластины 2 установлены к отклоняющим плоскостям корпуса 1 под углом, обеспе- чивакщим сведение пальцев захвата. 3 ил. € (Л 00 со сд 4 00 ю гч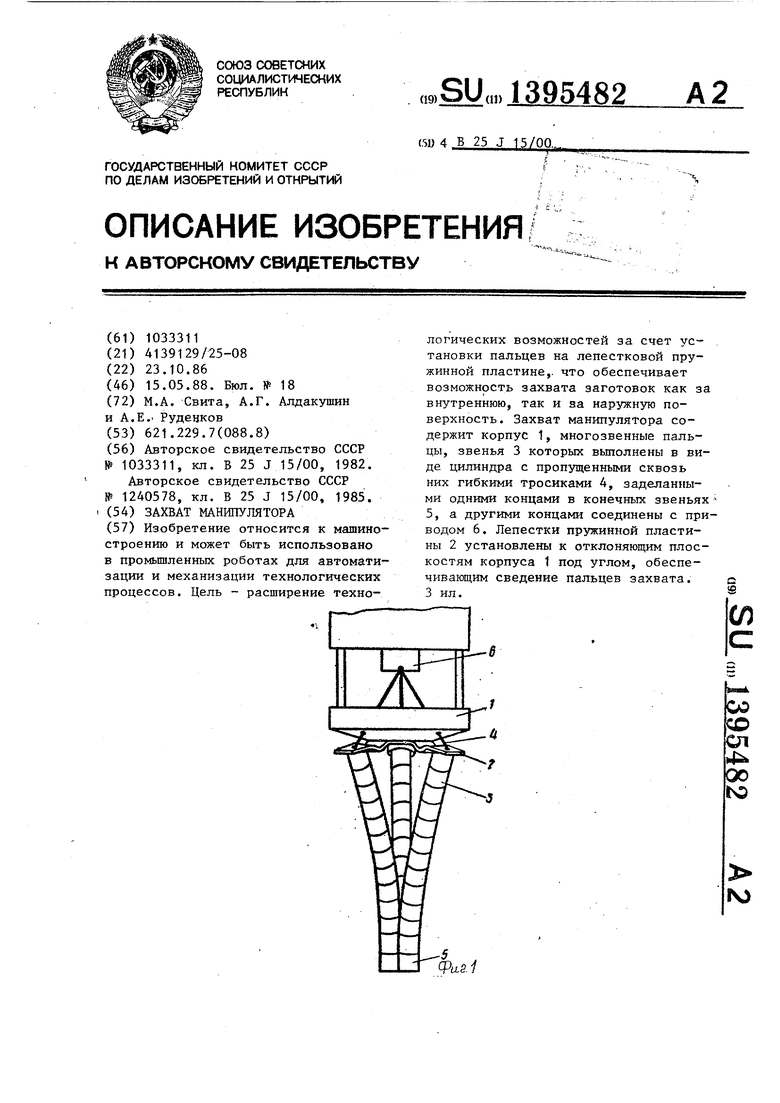
ВНИШШ Заказ 2451/17 Тираж 908
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
X
Подписное
| Схват манипулятора | 1982 |
|
SU1033311A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Схват манипулятора | 1985 |
|
SU1240578A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
