Изобретение относится к красильно-отделочному производству текстильной промышленности, а именно к технологическому оборудованию пряжекрасильного производства в аппаратах жидкостной обработки под давлением.
Известно устройство для формирования носителей, содержащее конвейеры для транспортирования и поднятия паковок на заданную высоту, механизм для установки на стержень требуемого количества паковок, механизм позиционирования стержней путем вращения и перемещения носителя в горизонтальной плоскости и механизм выгрузки паковок с носителем на приемную тележку [1]
К недостаткам устройства следует отнести отсутствие устройства для перемещения и установки фиксаторов и манипулятора, что не позволяет полностью автоматизировать процесс загрузки носителя. Кроме того, для размещения устройства требуются значительные производственные площади, так как носитель перемещается в горизонтальной плоскости, а загрузка носителя в вертикальном положении снижает долговечность патрона паковок.
Известна установка для насадки поковок на носитель, содержащая транспортер для подачи паковок, механизм их позиционирования, носитель со стержнями для паковок, расположенный над носителем и установленный в опоре загрузочный патрубок для паковок и блок управления [2]
Изобретение направлено на решение задачи повышения автоматизации, сокращения производственных площадей и увеличение срока эксплуатации патронов паковок.
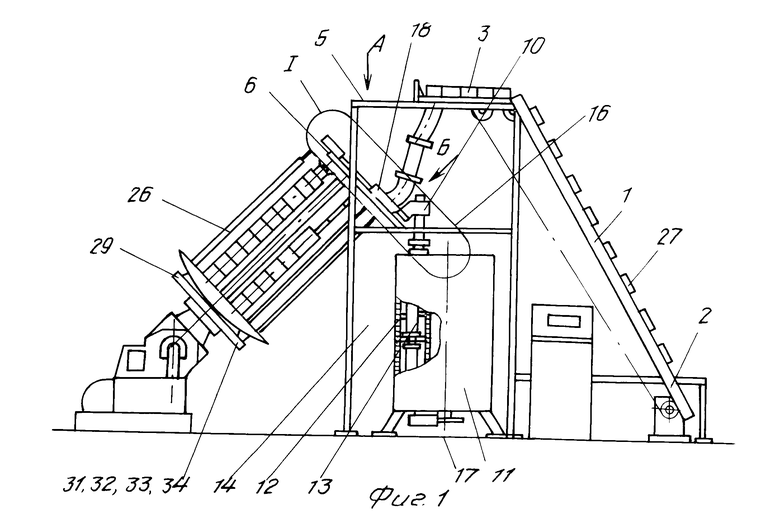
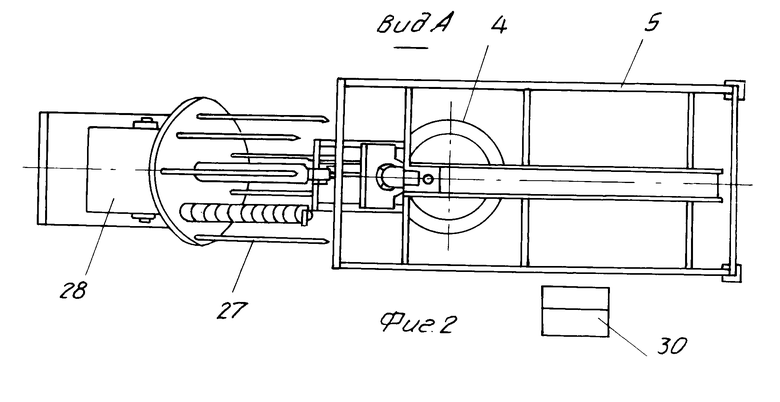
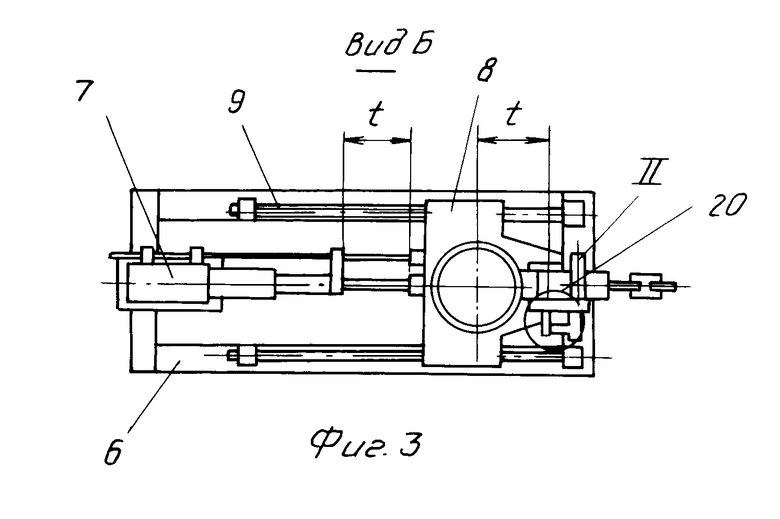
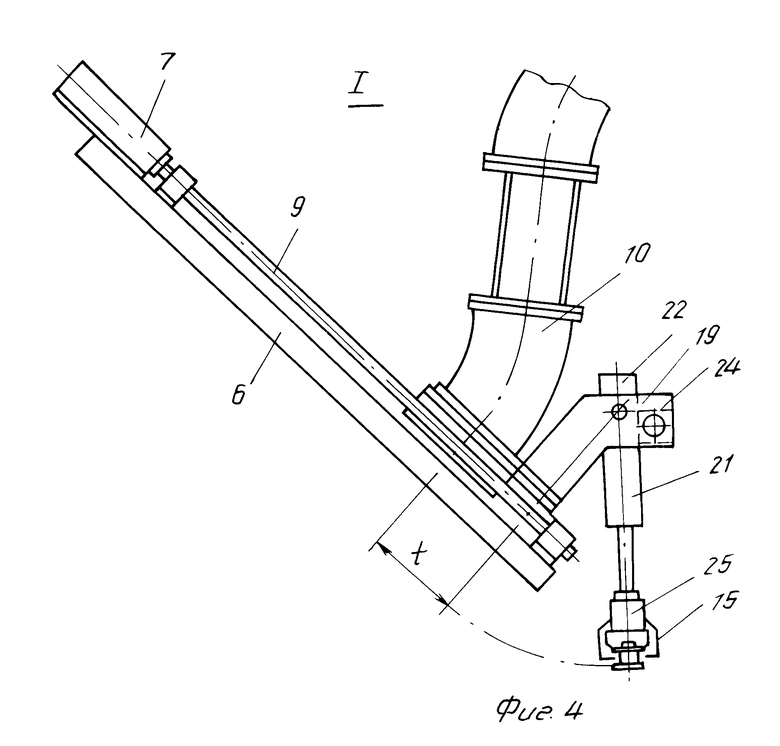
На фиг.1 изображена установка, вид спереди; на фиг.2 вид по стрелке А на фиг. 1; на фиг.3 вид по стрелке Б на фиг.1; на фиг.4 выносной элемент I на фиг.1; на фиг.5 выносной элемент II на фиг.3.
Установка содержит транспортер 1 для подачи паковок с приводом 2, загрузочную площадку 3 со шторками 4, каркас 5 с наклонной неподвижной рамой 6, на которой установлены телескопический цилиндр 7, опора 8 с направляющими 9 и вмонтированным в опору 8 загрузочным патрубком 10, связанным с загрузочной площадкой 3.
Загрузочное устройство 11 выполнено в виде бункера 12 и содержит спиралеобразный лоток 13, крыльчатку с лопастями 14 для подачи фиксаторов 15 на загрузочную позицию 1 с помощью привода 17, и датчик 18 контроля выхода фиксатора 15 на загрузочную позицию 16 для последующего захвата. На опоре 8 имеется кронштейн 19, на котором размещены два рабочих цилиндра 20 и 21. Цилиндр 20 закреплен неподвижно в горизонтальном положении.
Цилиндр 21 закреплен вертикально на поворотной оси 22 с байонетным пазом 23, который сопрягается с пальцем 24, установленным на конце штока цилиндра 20.
На конце штока 21 размещен захват 25 для взятия, перемещения и установки фиксаторов 15 на стержни носителя 26 после заполнения их партией паковок 27.
У каркаса 5 установлен манипулятор 28 с вращаемым столом 29, на котором закреплен носитель 26.
Управление работой установки по данной программе осуществляется с помощью блока управления 30 и датчиков контроля 31, 32, 33 и 34 для подачи соответствующих команд на работу цилиндра 7 и стола 29 манипулятора 28.
Установка работает следующим образом.
В исходном положении сориентированные паковки 27 находятся на ленте транспортера 1, манипулятор 28 с носителем 26 в наклонном положении, большой и средний штоки телескопического цилиндра 7 втянуты, а малый шток выдвинут. Шток цилиндра 20 втянут. Цилиндр 21 с захватом 25 в вертикальном положении над загрузочной позицией 16 загрузочного устройства 11, шток цилиндра 21 втянут, губки захвата 25 разжаты. Фиксатор 15 находится на загрузочной позиции 16.
При подаче питания транспортер 1, манипулятор 28, загрузочное устройство 11 и блок управления 30 становятся под напряжение.
Паковка 27 поступает на загрузочную площадку 3 со шторками 4, которые под действием веса паковки открываются и паковка 27 попадает в загрузочный патрубок 10, проходит его, срабатывает датчик 31 и паковка 27 поступает на стержень носителя 26. Цикл прохождений одной паковки 27 закончен.
Таким образом, на один стержень носителя 26 устанавливается несколько паковок 27. Затем по команде датчика 31, с учетом заданной программы, вытягивается шток цилиндра 21 с захватом 25 и происходит захват фиксатора 15 на загрузочной позиции 16.
Шток цилиндра 21 с захватом 25 и фиксатором 15 втягивается, а шток цилиндра 20 выдвигается и осуществляется перемещение пальца 24 по байонетному пазу 23 поворотной оси 22. Происходит поворот оси 32 и связанного с ней цилиндра 21 в сторону носителя 26. При этом цилиндр 21 с фиксатором 15 в захвате 25 занимает положение, соосное стержню носителя. Затем малый шток телескопического цилиндра 7 втягивается и перемещается по направляющим 9 опоры 8 с патрубком 10 и кронштейном 19.
Шток цилиндра 21 с фиксатором 15 в захвате 25 выдвигается и устанавливается соосно стержню носителя 26. Губки захвата 25 разжимаются, шток цилиндра 21 с захватом 25 втягивается и фиксатор 15 остается на стержне носителя 26.
По команде датчика 32 происходит поворот стола 29 манипулятора 28 с носителем 26 на угол, при котором каждый из стержней носителя 26 поочередно занимает положение под патрубком 10.
Малый шток цилиндра 7 выдвигается, а шток цилиндра 21 втягивается и возвращает механизм позиционирования в исходное положение.
Затем срабатывает привод 17 загрузочного устройства 11 и поворачивается крыльчатка с лопастями 14, подавая по спиралеобразному лотку 13 следующий фиксатор 15 на загрузочную позицию 16, где происходит останов фиксатора 15 по команде датчика 18.
Вновь повторяется рабочий цикл насадки паковок 27 на стержень носителя 26 с последующим закреплением их фиксатором 15. После заполнения первого ряда стержней, т.е. стержней на наименьшей концентрической окружности носителя 26 паковками 27 и закрепления фиксаторами 15 происходит выдвижение среднего штока цилиндра 7 и перемещение опоры 8 с патрубком 10 и кронштейном 19 по направляющим 9.
Аналогичным образом по командам датчика 33 происходит автоматический цикл насадки паковок 27 и фиксаторов 15 на стержни второго ряда, т.е. на стержни средней концентрической окружности носителя 26.
По команде датчика 34 выдвигается большой шток цилиндра 7 и опора 8 с патрубками 10 и кронштейном по направляющим 9. Вновь осуществляется процесс насадки паковок 27 и фиксаторов 15 на стержни третьего ряда, т.е. на стержни наибольшей концентрической окружности носителя 26.
Таким образом, заполнение носителя 26 паковками 27 и фиксаторами 15 осуществляется с помощью дискретного пошагового поворота стола 29 на определенные углы расположения стержней на носителе 26 и перемещения поперечины 8 с патрубком 10 и кронштейном 10 под воздействием штоков цилиндра 7. После заполнения всего носителя 26 паковками 27 отключается питание контейнера 1 и загрузочного устройства 11. Манипулятор 28 с носителем 26, паковками 27 и фиксаторами 15 совершает поворот в вертикальное положение. Автоматический цикл насадки паковок 27 и фиксаторов 15 на стержни носителя 26 закончен.
С помощью грузоподъемного устройства загруженный носитель транспортируется в красильное отделение. Затем с помощью грузоподъемного устройства на освободившийся стол 29 манипулятора 28 устанавливают пустой носитель 26. Загрузочное устройство 11 наполняют новыми фиксаторами 15, а транспортер загружают новыми паковками и автоматический цикл насадки повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ СЪЕМА КАТУШЕК РОВНИЦЫ С НОСИТЕЛЯ | 1993 |
|
RU2061809C1 |
| УСТАНОВКА ДЛЯ ФОРМИРОВАНИЯ И РАСФОРМИРОВАНИЯ НОСИТЕЛЕЙ | 1996 |
|
RU2100502C1 |
| Установка для насадки катушек ровницы на носитель | 1991 |
|
SU1802011A1 |
| Устройство для насадки текстильных паковок на носитель аппарата для жидкостной обработки под давлением | 1980 |
|
SU931857A1 |
| Устройство для смены уточных паковок на ткацком станке | 1990 |
|
SU1808028A3 |
| Устройство для насадки паковок к аппарату для жидкостной обработки под давлением | 1978 |
|
SU765432A1 |
| Устройство для жидкостной обработки текстильного материала в паковках | 1980 |
|
SU910891A1 |
| Устройство для насадки поковок на стержни носителя к аппарату для жидкостной обработки под давлением | 1987 |
|
SU1452870A1 |
| СОЕДИНИТЕЛЬНАЯ МУФТА ТРУБОПРОВОДОВ С ПРИВОДОМ | 2024 |
|
RU2832372C1 |
| Поточная линия для сборки и сваркиМЕТАллОКОНСТРуКций | 1979 |
|
SU804314A1 |

Использование: в красильно-отделочном производстве текстильной промышленности, а именно в технологическом оборудовании пряжекрасительного производства в аппаратах жидкостной обработки под давлением. Сущность изобретения: установка содержит конвейер для транспортирования паковок, манипулятор, механизм позиционирования, носитель паковок и неподвижную наклонную над носителем раму с направляющими и загрузочным подвижным патрубком, связанным с загрузочной площадкой и вмонтированным в опору, соединенную с телескопическим цилиндром. На опоре установлен с закрепленным на нем в горизонтальной плоскости цилиндром, на конце штока которого установлен палец, взаимодействующий с байонетным пазом на поверхности поворотной оси, установленной на кронштейне в горизонтальной плоскости и жестко связанной с вертикально установленным цилиндром, на конце штока которого размещен захват. Расстояние между центрами основания патрубка, вмонтированного в опору и поворотной оси равно ходу штока телескопического цилиндра, причем штоки цилиндра имеют одинаковый ход. Стержни на носителе расположены на концентрических окружностях, радиусы которых отличаются на величину хода штока цилиндра. Кроме того, установка снабжена средством для загрузки, подачи и установки фиксаторов на заполненные паковками стержни носителя. 1 з. п. ф-лы, 5 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, Авторское свидетельство, 1452870, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
