Изобретение относится к легкой промышленности, точнее к технологическому оборудованию пряжекрасильного льнопроизводства.
Целью изобретения является повышение автоматизации, сокращение производственных площадей и увеличение срока эксплуатации катушек.
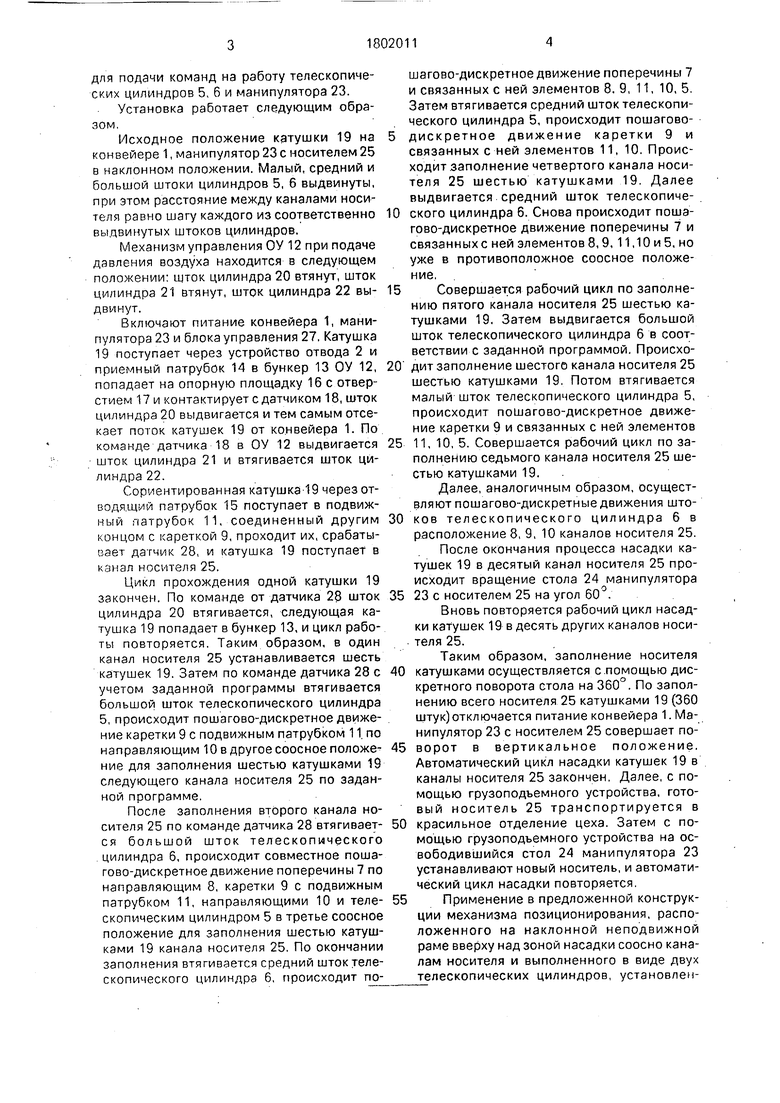
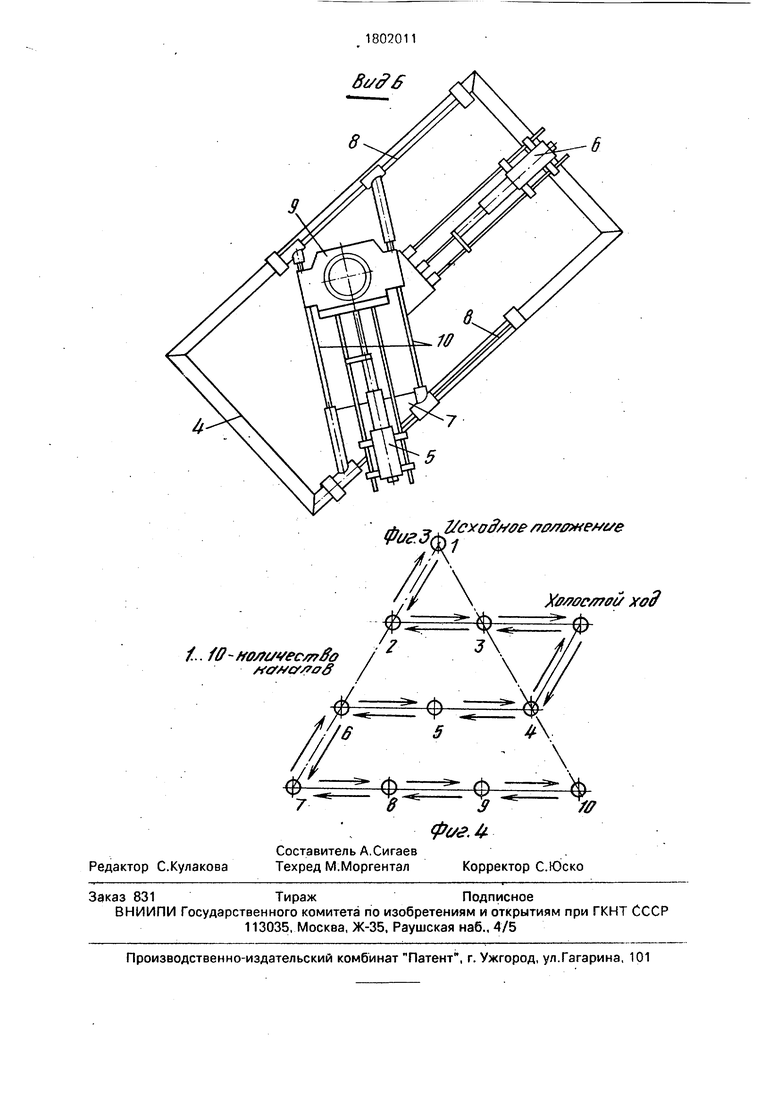
На фиг. 1 изображена установка для насадки катушек ровницы на носитель, вид спереди; на фиг. 2 - вид А фиг. 1; на фиг. 3 изображен механизм позиционирования, вид Б фиг.1; на фиг. 4 дана схема движения механизма позиционирования.
Установка содержит конвейер 1 для транспортирования катушек с устройством отвода 2, каркас 3 с наклонной неподвижной рамой 4, на которой установлены телескопические цилиндры 5 и 6, поперечина 7 С направляющими 8, каретка 9, установленная в направляющих 10, подвижный патру бок 11, связанный с устройством для поштучного приема и ориентации катушек 12 (ОУ), закрепленным на каркасе 3.
ОУ 12 выполнено в виде бункера 13 коробчатой формы и содержит приемный 14 и отводящий 15 патрубки, опорную площадку 16 с отверстием 17 для ориентирования, flat4HK 18 конечного положения катушки 19 на площадке 16 и механизмы управления, выполненные в виде цилиндра 20 для поштучного отсекания катушки 19 от потока катушек на конвейере 1, цилиндра 21 для удержания катушки 19 в вертикальном положении в бункере 13 и цилиндра 22 для сталкивания сориентированной катушки 19 в отводящий патрубок 15. Около каркаса 3 установлен манипулятор 23 с поворотным столом 24, на котором закреплен носитель 25, разделенный вертикальными стенками на шесть секций со стойками 26 внутри каждой секции. Пространство между стенками носителя 25 и стойками. 26, заполненное по высоте шестью катушками 19, далее условно названо каналом носителя 25.
Управление работой установки по заданной программе осуществляется с помощью блока-управления 27 и датчика 28
ел
с
00
о
ND О
для подачи команд на работу телескопических цилиндров 5, 6 и манипулятора 23.
Установка работает следующим образом.
Исходное положение катушки 19 на конвейере 1, манипулятор 23 с носителем 25 в наклонном положении. Малый, средний и большой штоки цилиндров 5, б выдвинуты, при этом расстояние между каналами носителя равно шагу каждого из соответственно выдвинутых штоков цилиндров.
Механизм управления ОУ 12 при подаче давления воздуха находится в следующем положении: шток цилиндра 20 втянут, шток цилиндра 21 втянут, шток цилиндра 22 выдвинут.
Включают питание конвейера 1, манипулятора 23 и блока управления 27, Катушка 19 поступает через устройство отвода 2 и приемный патрубок 14 в бункер 13 ОУ 12, попадает на опорную площадку 16 с отверстием 17 и контактирует с датчиком 18, шток цилиндра 20 выдвигается и тем самым отсекает поток катушек 19 от конвейера 1. По команде датчика 18 в ОУ 12 выдвигается шток цилиндра 21 и втягивается шток цилиндра 22.
Сориентированная катушка 19 через от- водя. патрубок 15 поступает в подвижный патрубок 11, соединенный другим концом с кареткой 9, проходит их, срабатывает датчик 28, и катушка 19 поступает в канал носителя 25.
Цикл прохождения одной катушки 19 закончен. По команде от датчика 28 шток цилиндра 20 втягивается, следующая катушка 19 попадает в бункер 13, и цикл работы повторяется. Таким образом, в один канал носителя 25 устанавливается шесть катушек 19. Затем по команде датчика 28 с учетом заданной программы втягивается большой шток телескопического цилиндра 5, происходит пошагово-дискретное движение каретки 9 с подвижным патрубком 11. по направляющим 10 в другое соосное положение для заполнения шестью катушками 19 следующего канала носителя 25 по заданной программе.
После заполнения второго канала носителя 25 по команде датчика 28 втягивается большой шток телескопического цилиндра б, происходит совместное пошагово-дискретное движение поперечины 7 по направляющим 8, каретки 9 с подвижным патрубком 11, направляющими 10 и телескопическим цилиндром 5 в третье соосное положение для заполнения шестью катушками 19 канала носителя 25. По окончании заполнения втягивается средний шток телескопического цилиндра 6, происходит пошагово-дискретное движение поперечины 7 и связанных с ней элементов 8, 9, 11, 10, 5. Затем втягивается средний шток телескопического цилиндра 5, происходит пошаговодискретное движение каретки 9 и связанных с ней элементов 11, 10. Происходит заполнение четвертого канала носителя 25 шестью катушками 19. Далее выдвигается средний шток телескопиче0 ского цилиндра 6. Снова происходит пошагово-дискретное движение поперечины 7 и связанныхс ней элементов 8,9,11,10 и 5, но уже в противоположное соосное положение,
5 Совершается рабочий цикл по заполнению пятого канала носителя 25 шестью катушками 19, Затем выдвигается больаюй шток телескопического цилиндра 6 в соответствии с заданной программой. Происхо0 дит заполнение шестого канала носителя 25 шестью катушками 19. Потом втягивается малый шток телескопического цилиндра 5, происходит пошагово-дискретное движение каретки 9 и связанных с ней элементов
5 11,10, 5. Совершается рабочий цикл по заполнению седьмого канала носителя 25 шестью катушками 19.
Далее, аналогичным образом, осуществляют пошагово-дискретные движения што0 ков телескопического цилиндра 6 в расположение 8, 9, 10 каналов носителя 25. После окончания процесса насадки катушек 19 в десятый канал носителя 25 происходит вращение стола 24 манипулятора
5 23 с носителем 25 на угол 60°.
Вновь повторяется рабочий цикл насадки катушек 19 в десять других каналов носителя 25.
Таким образом, заполнение носителя
0 катушками осуществляется с.помощью дискретного поворота стола на 360°. По заполнению всего носителя 25 катушками 19 (360 штук)отключается питание конвейера 1. Манипулятор 23 с носителем 25 совершает по5 ворот в вертикальное положение. Автоматический цикл насадки катушек 19 в каналы носителя 25 закончен. Далее, с помощью грузоподьемного устройства, готовый носитель 25 транспортируется в
0 красильное отделение цеха. Затем с помощью грузоподъемного устройства на освободившийся стол 24 манипулятора 23 устанавливают новый носитель, и автоматический цикл насадки повторяется.
5 Применение в предложенной конструкции механизма позиционирования, расположенного на наклонной неподвижной раме вверху над зоной насадки соосно каналам носителя и выполненного в виде двух телескопических цилиндров, установленных под углом друг к другу на разных уровнях и соединенных - один с поперечиной, а другой - с кареткой с подвижным патрубком, позволяет исключить перемещение носителя в горизонтальной плоскости за счет осуществления поступательного пошагово- дискретного движения поперечины и каретки с подвижным патрубком по координатным осям плоскости в двух направлениях, что приводит к компактности конструкции механизма, т.е. уменьшению его габаритных размеров.
Применение в конструкции ориентирующего устройства позволяет осуществить автоматический процесс поштучной ориентации катушек ровницы, что позволяет автоматизировать процесс загрузки носителя.
Использование в конструкции манипулятора способствует повышению уровня автоматизации при эксплуатации в процессе насадки катушек ровницы на носитель, а также приводит к компактности конструкции установки, т.е. сокращению производственных площадей.
Наклонное положение носителя на столе манипуляторе создает улучшенные условия для перемещения катушек ровницы по каналам носителя, так как за счет использования сил трения снижается действие гравитационных сил при падении катушек ровницы на основание носителя, что приводит к более длительному использованию са- мих катушек ровницы, т.е. к их долговечности.
0
5
0
5
0
Формула изобретения
1. Установка для насадки катушек ровницы на носитель содержащая конвейер для транспортирования катушек, механизм их позиционирования, носитель поковок и блок управления, отличающаяся тем, что, с целью повышения автоматизации, она имеет расположенную над носителем наклонную неподвижную раму с направляющими для размещения на ней механизма позиционирования, имеющего подвижный патрубок и два телескопических цилиндра, расположенных под углом друг к другу в горизонтальной плоскости на разных уровнях, причем один из цилиндров размещен на раме посредством поперечны, установленной с возможностью перемещения по направляющим, а другой цилиндр - посредством поперечины и каретки, установленных с возможностью перемещения поперечно раме по направляющим, при этом конец подвижного патрубка вмонтирован в каретку..
2. Установка по п. 1,отличающаяся тем, что она имеет расположенное на каркасе установки средство для ориентирования катушек, имеющие рабочие цилиндры и связанное с подвижным патрубкам.
3. Установка по п. 1,отличающаяся тем, что она имеет манипулятор для размещения носителя.
4. Установка поп. 3, отличающаяся тем, что носитель на манипуляторе установлен наклонно.
Фиг.1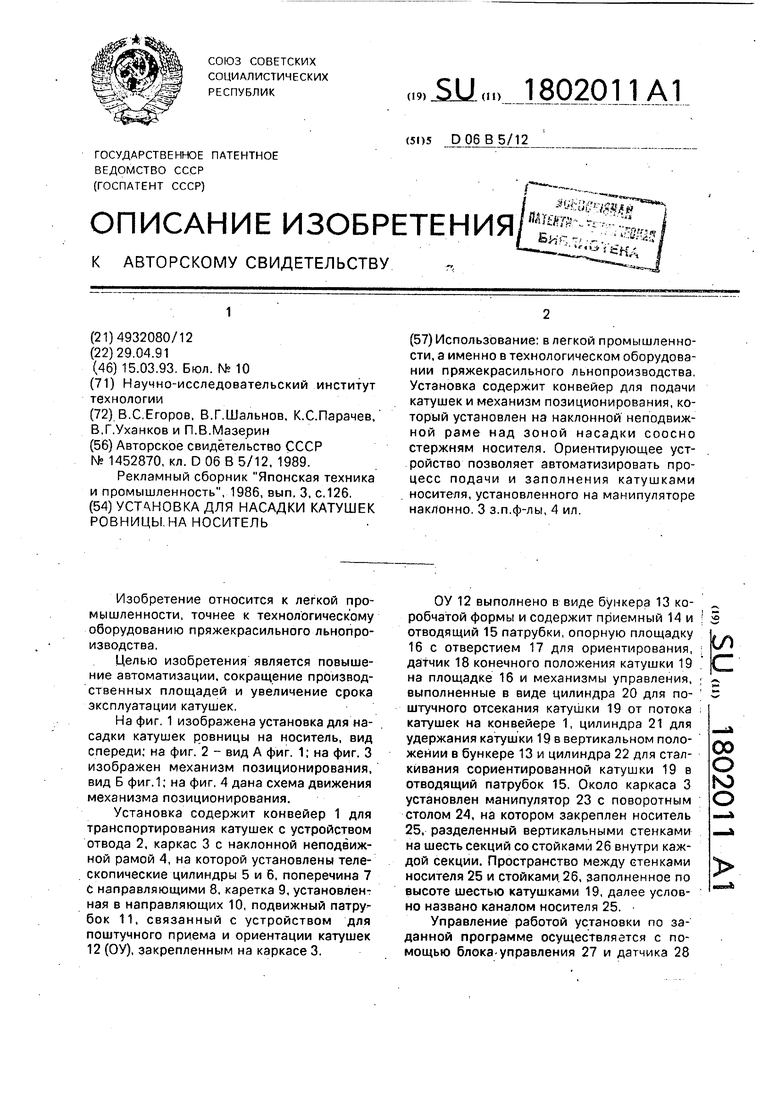
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ НАСАДКИ ПАКОВОК НА НОСИТЕЛЬ | 1993 |
|
RU2051244C1 |
| УСТАНОВКА ДЛЯ ФОРМИРОВАНИЯ И РАСФОРМИРОВАНИЯ НОСИТЕЛЕЙ | 1996 |
|
RU2100502C1 |
| УСТАНОВКА ДЛЯ СЪЕМА КАТУШЕК РОВНИЦЫ С НОСИТЕЛЯ | 1993 |
|
RU2061809C1 |
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
| Устройство для обслуживания многоэтажного вулканизационного пресса | 1982 |
|
SU1054094A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Установка для контроля альфа-загрязненности тепловыделяющих элементов | 2018 |
|
RU2696001C1 |
| Привод линейного перемещения | 1988 |
|
SU1516343A1 |
| ЛИНИЯ НАМОТКИ КАТУШЕК РЕЛЕ | 2004 |
|
RU2262479C1 |
| Устройство для укладки катушек в пазы статора электрической машины | 1982 |
|
SU1095316A1 |
Использование: в легкой промышленности, а именно в технологическом оборудовании пряжекрасильного льнопроизводства. Установка содержит конвейер для подачи катушек и механизм позиционирования, который установлен на наклонной неподвижной раме над зоной насадки соосно стержням носителя. Ориентирующее устройство позволяет автоматизировать процесс подачи и заполнения катушками носителя, установленного на манипуляторе наклонно. 3 з.п.ф-лы, 4 ил.
Buff A
Фиг. 2
Ф j Z/cxofaee я0л0же Ј/е
Xff/ 0C/7 0V X0(f
| Устройство для насадки поковок на стержни носителя к аппарату для жидкостной обработки под давлением | 1987 |
|
SU1452870A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Рекламный сборник Японская техника и промышленность, 1986, вып | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
