Изобретение относится к измерительной технике, в частности к технике определения смещения между осями в измерительных установках.
Известен способ определения угла рассогласования между осью вращения платформы и осью перемещения измерительной головки, включающий измерение координат измерительной головки относительно базовой поверхности с помощью специальных (дополнительных) инструментов и определения смещения и угла рассогласования по результатам измерения (Боднер В.А. Алферов А.В. Измерительные приборы. Издательство стандартов, 1986, с.100, рис.5, 4).
Недостаток этого способа состоит в сложности определения (дополнительного конструирования) базовой поверхности, однозначно характеризующей с заданной точностью положение измерительной головки относительно этой поверхности, а также в необходимости использования дополнительного измерительного оборудования.
Наиболее близким техническим решением является способ определения смещения и угла рассогласования, включающий измерение расстояния R от оси перемещения измерительной головки до точек поверхности и самого перемещения H измерительной головки, и сведение к минимуму с помощью регулировки смещения и составляющих угла рассогласования по результатам измерения (патент СССР N 1718735, C 01 B 7/28, 1992).
Недостаток этого способа состоит в сложности его реализации из-за необходимости проектирования регулирующего приспособления, позволяющего изменять расположение в пространстве оси чувствительности измерительной головки, при этом за счет этого приспособления ухудшается точность измерения.
Техническая задача изобретения упрощение реализации за счет отсутствия необходимости регулировки и повышение точности.
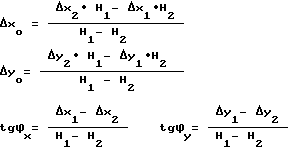
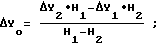
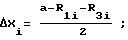
Технический результат достигается тем, что в способе смещения и угла рассогласования между осью вращения платформы и осью перемещения измерительной головки, заключающемся в том, что производят вращение платформы с установленной на ней деталью, перемещают измерительную головку, измеряют расстояния от оси перемещения измерительной головки до точек поверхности детали и перемещения самой измерительной головки, по полученным данным определяют смещение и угол рассогласования, согласно изобретения, в качестве детали используют эталон в виде правильного параллелепипеда со сторонами основания "а", жестко установленный на платформе, формируют два значения перемещения измерительной головки Hi, где i 1,2, каждое для соответствующего угла поворота платформы αi, при котором значение R1i расстояния от оси измерительной головки до боковой поверхности эталона минимально, далее фиксируют расстояния R2i, R3i и R4i, соответственно, при повороте платформы на углы αi+β, αi+180° и αi+β+180°, при этом угол β выбирают менее 45o, о величине смещения и угла рассогласования между осью вращения платформы и осью перемещения измерительной головки судят по составляющим этих величин из зависимостей: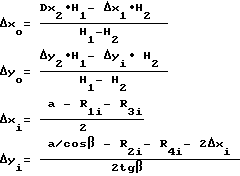
и составляющие vk и Φy угла рассогласования в виде:
а текущие значения Δx и Δy для произвольной высоты H определяют в виде,
Δx = Δxо+ H•tgΦx , Δy = Δyо+ HtgΦy
На фиг. 1 представлена схема расположения осей измерения и перемещения измерительной головки и системы координат. На этой схеме X, Y, H базовая (исходная) система координат (базис I), L1 ось вращения платформы (совпадает с осью ОН), L2 ось перемещения измерительной головки, X2, Y2, H2 система координат (базис II), связанная с измерительной головкой. H2 совпадает с осью L2, X2 перпендикулярна H2 и совпадает с направлением измерения, Y2 перпендикулярна плоскости H2O2X2, O2 начало координат в базисе II точка пересечения оси L2 с плоскостью XOY, Φy угол между осью L2 и плоскостью YOH, Φx угол между осью L2 и плоскостью XOH, Δxо, Δyо- координаты точки O2 в базисе I (начальное смещение оси L2).
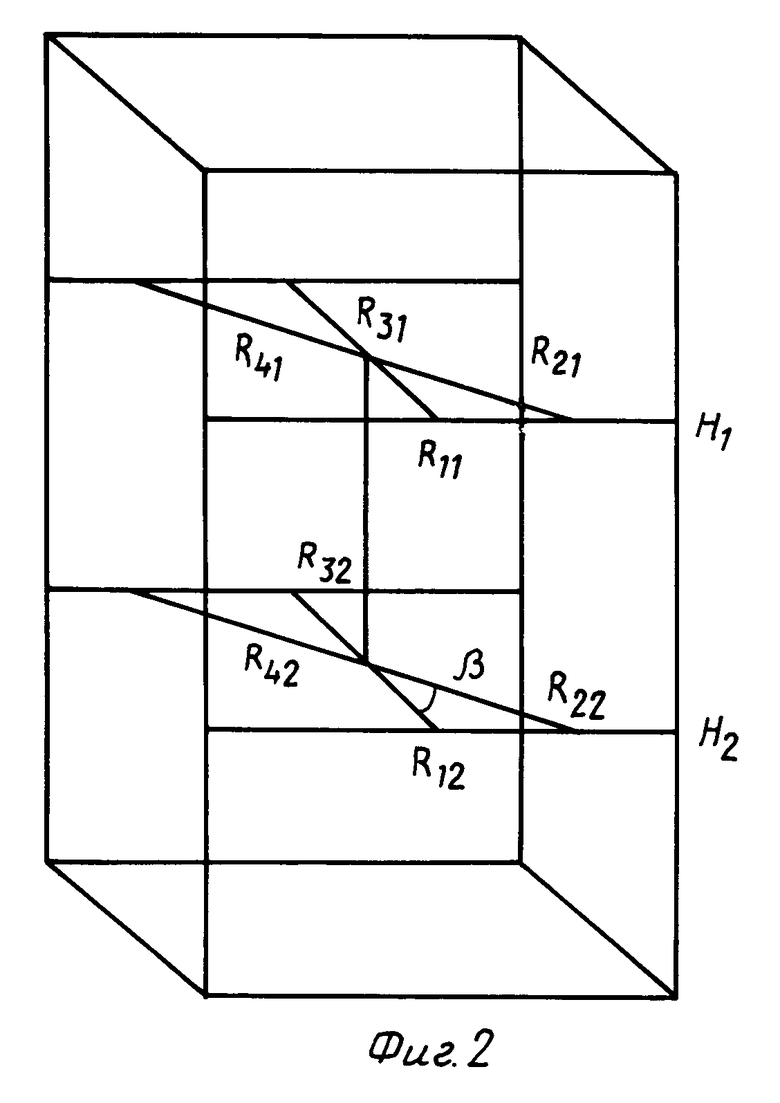
На фиг.2 изображена схема проведения измерений.
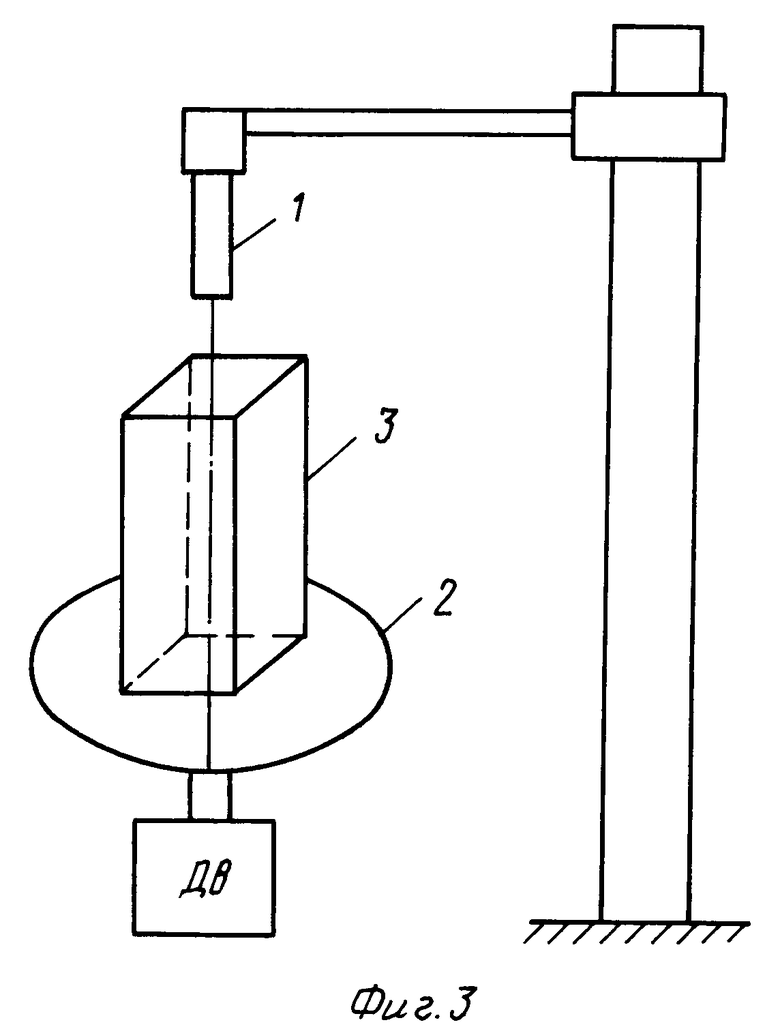
На фиг. 3 приведен пример установки, для которой применим предлагаемый способ. Здесь I измерительная головка, перемещающаяся в вертикальном направлении, 2 вращающаяся платформа, 3 установленный на платформе эталон.
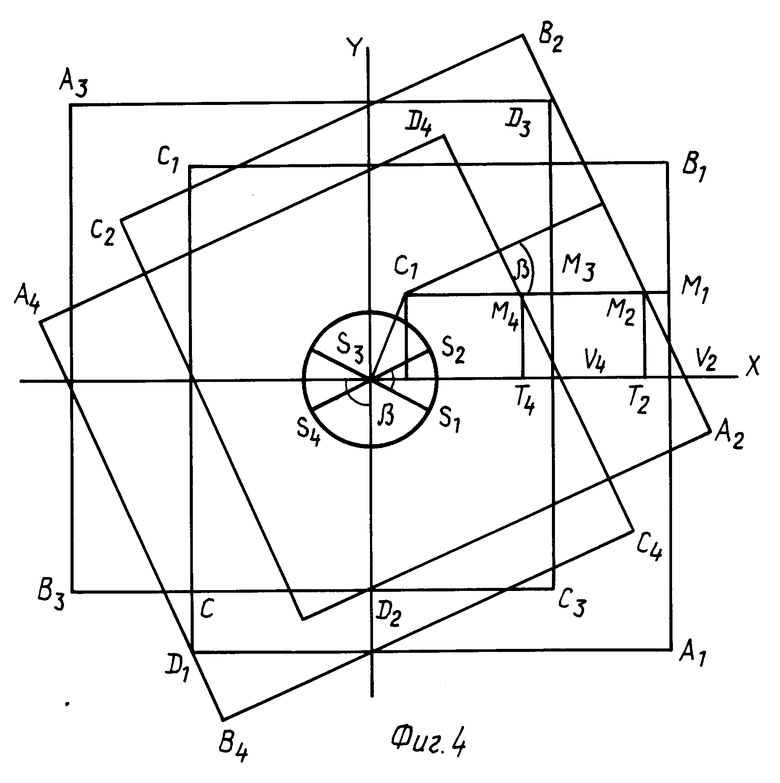
На фиг. 4 изображена схема измерений при фиксированном значении высоты измерительной головки. На ней учтено возможное несовпадение осей эталона и платформы. Ось платформы проходит через точку О, ось измерительной головки - через точку O1, ось эталона при проведении измерений последовательно проходит через точки S1, S2, S3, S4. Эталон в сечении горизонтальной плоскостью при этом образует квадраты Aj Bj Cj Dj со стороной "а". Направление измерения совпадает с осью X, координаты точки О1 равны Δxi и Δyi. Измеренные расстояния Rji O1 Mj при j 1-4.
Рассмотрим процесс определения координат Δx и Δy смещения оси перемещения измерительной головки L2 в базисе I. Пусть на вращающейся платформе 2 установлен эталон 3 в виде правильного параллелепипеда со стороной "а" и осью симметрии, совпадающей с осью вращения платформы L.
Считается, что измерительная головка осуществляет измерение от точек, расположенных на линии L2, до точек поверхности эталона в направлении оси ОХ.
Из начального положения включим двигатель и зафиксируем минимальное из измеренных расстояний R11 при некотором перемещении измерительной головки 1 H1 (фиг. 3). Пусть этому положению соответствует угол αi поворота платформы 2. Повернем платформу 2 от этого положения на угол β<45o и зафиксируем расстояние R21 до поверхности эталона. Приведем платформу 2 в положение, которому соответствует угол поворота αi+ 180° и зафиксируем расстояние R31 до поверхности эталона. Приведем платформу 2 в положение, которому соответствует угол поворота αi+β + 180o и зафиксируем расстояние R41 до поверхности эталона (фиг. 2). Угол β выбирается меньше 45o для того, чтобы фиксируемое расстояние R21 относилось к той же боковой грани параллелепипеда, что и фиксируемое расстояние R11, а R41 к той же грани, что и R31.
Обозначим расстояние от точки S1 до отрезка  расстояние от точки S2 до отрезка
расстояние от точки S2 до отрезка  , расстояние от точки S3 до отрезка
, расстояние от точки S3 до отрезка  , расстояние от точки S4 до отрезка
, расстояние от точки S4 до отрезка  (фиг.4). Для обоснования приведенных формул сначала докажем:
(фиг.4). Для обоснования приведенных формул сначала докажем: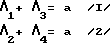
Если обозначить расстояние между параллельными отрезками [A1B1] и  и учесть что Sj центр квадрата AjBjCjDj, то:
и учесть что Sj центр квадрата AjBjCjDj, то:
Аналогично доказывается 2.
Обозначим расстояние от точки O1 до отрезка [A1B1]L1, до отрезка [A2B2] L2, до отрезка [C3D3]L3, до отрезка [C4D4]L4
Из формул I и 2 и вследствие того, что O1 центр отрезков [S1S3] и [S2S4] следует, что: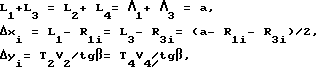
Для получения текущих значений координат смещения Δx и Δy от перемещения измерительной головки H определяем значение Δxо и Δyо в плоскости XOY (при H 0), а также значения углов Φx и Φy (фиг.1). Это легко сделать методом решения подобных треугольников.
тогда текущие значения Δx и Δy будут равны
Δx = Δxо+ H•tgΦx, Δy = Δyо+ H•tgΦy
Способ определения составляющих смещения Δxо и Δyо и составляющих Φx и Φy угла рассогласования между осью вращения платформы и осью перемещения измерительной головки позволяет исключить операции регулировки (сведение к нулю составляющих Δx и Δy смещения и составляющих Φx и Φy угла), что существенно упрощает конструкцию измерительной установки и позволяет повысить точность измерения. Например, при Φx= Φy 0,05o, Δx = Δy = 0,2мм 0,2 мм (возможные пределы регулировки при использовании известной измерительной установки и способа) погрешность измерения расстояний ΔR при измеряемых расстояниях R 200 мм и H 300 мм равно 0,7 мм.
Использование: в измерительной технике, в частности для определения смещения между осями в измерительных установках. Сущность изобретения: в способе определения смещения и угла рассогласования между осью вращения платформы и осью перемещения измерительной головки, заключающимся в том, что производят вращение платформы с установленной на оси деталью, перемещают измерительную головку, измеряют расстояние от оси перемещения измерительной головки до точек поверхности детали и перемещения самой измерительной головки, по полученным данным определяют смещение и угол рассогласования, в качестве детали используют эталон в виде правильного параллелепипеда со стороной основания "а", жестко установленный на платформе, формируют два значения перемещения измерительной головки Hi, где i = 1,2, каждое для соответствующего угла поворота платформы αi, при котором значение R1i расстояния от оси измерительной головки до боковой поверхности эталона минимально, далее фиксируют расстояние R2i, R3i и R4i, соответственно, при повороте платформы на углы αi+β,αi+180°, αi+β+180°,, при этом угол β выбирают менее 45o, о величине смещения и угла рассогласования между осью вращения платформы и осью перемещения измерительной головки судят по составляющим этих величин. 4 ил.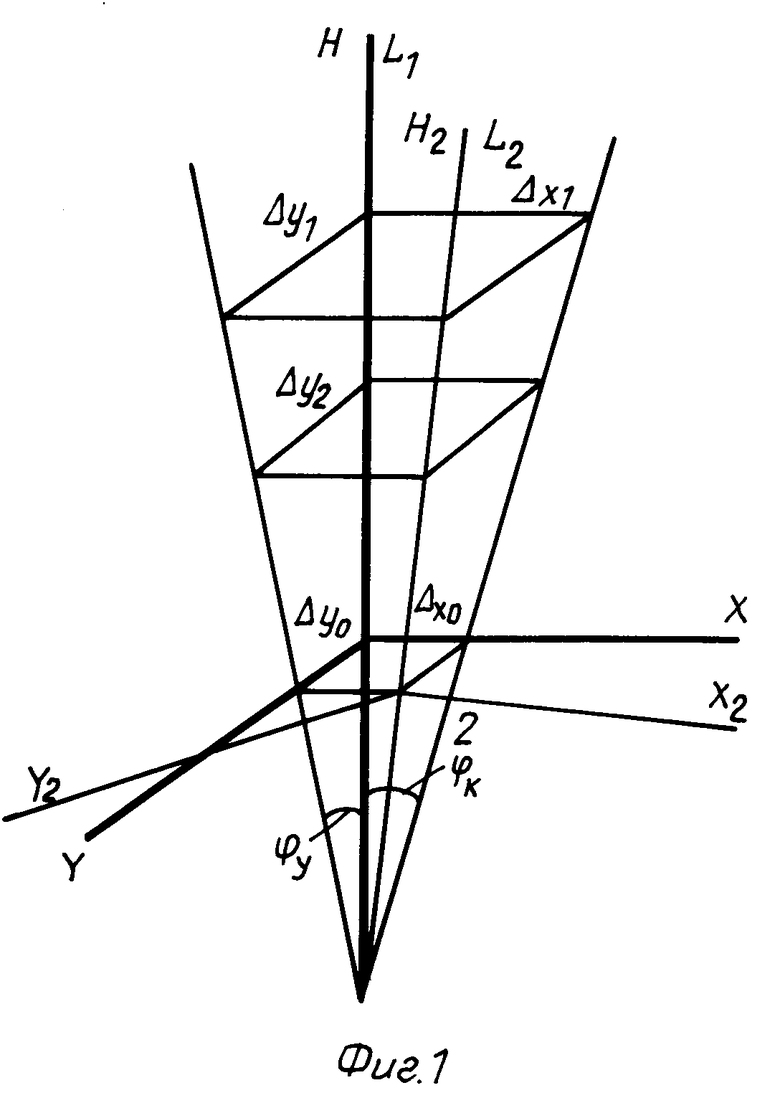
Способ определения смещения и угла рассогласования между осью вращения платформы и осью перемещения измерительной головки, заключающийся в том, что производят вращение платформы с установленной на ней деталью, перемещают измерительную головку, измеряют расстояния от оси перемещения измерительной головки до точек поверхности детали и перемещения самой измерительной головки, по полученным данным определяют смещение и угол рассогласования, отличающийся тем, что в качестве детали используют эталон в виде правильного параллелепипеда со стороной основания "а", жестко установленный на платформе, формируют два значения перемещения измерительной головки Hi, где i 1, 2, каждое для соответствующего угла поворота платформы αi, при котором значение R1 i расстояния от оси измерительной головки до боковой поверхности эталона минимально, далее фиксируют расстояние R2 i, R3 i и R4 i соответственно, при повороте платформы на углы αi+β, αi+180° и αi+β+180°, при этом угол β выбирают менее 45o, о величине смещения и угла рассогласования между осью вращения платформы и осью перемещения измерительной головки судят по составляющим этих величин, а составляющие смещения DXo,ΔXi и ΔYo,ΔYi и составляющие Φx и Φy угла рассогласования определяются из зависимостей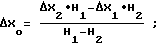

 в
в
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Боднер В.А., Алферов А.В | |||
| Измерительные приборы | |||
| - Из-во стандартов, 1986, с.100, рис.5.4 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Контрольно-измерительное устройство | 1987 |
|
SU1718735A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
