Изобретение относится к области автомобилестроения, в частности к устройствам управления поворотом ведомых звеньез автопоезда, представляющих собой многоосные прицепы или независимые поворотные тележки и имеюплих поворотные оси или поворотные колеса.
Целью изобретения является улучшение управляемости транспортного средства путем обеспечения возможности повторения неповоротными колесами ведомого звена траектории движения неповоротных колес ведущего звена.
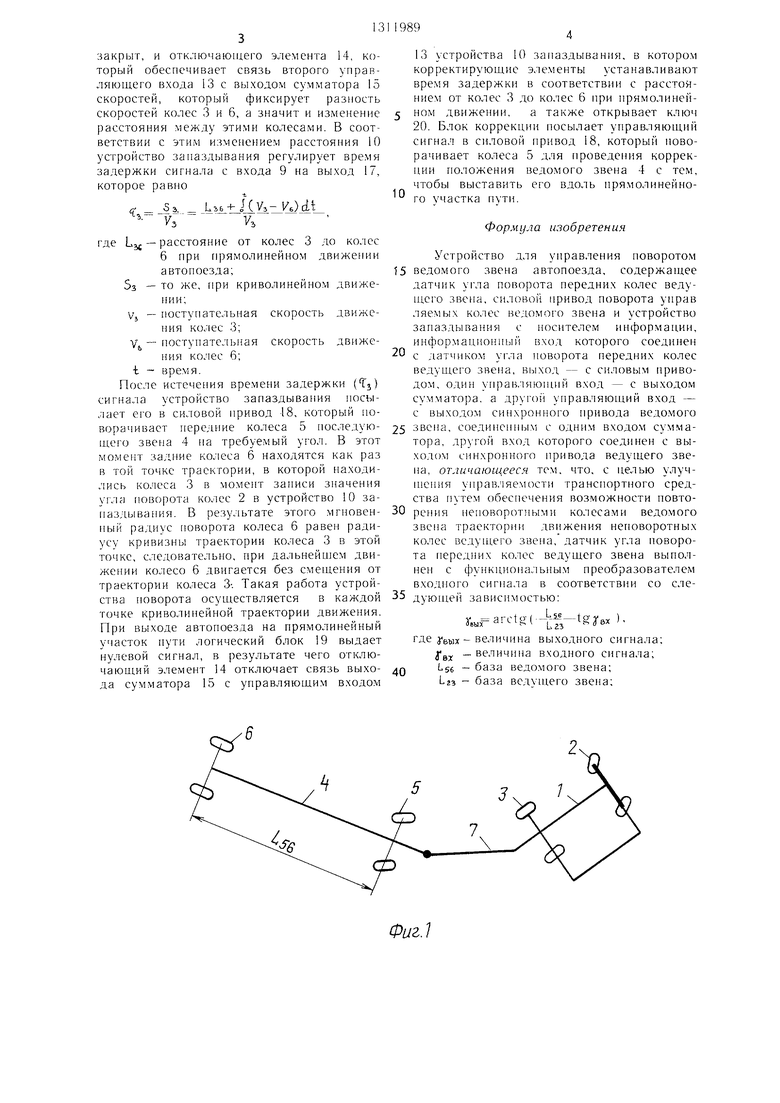
На фиг. 1 изображена кинематическая схема автопоезда, для управления которым предназначено предлагаемое устройство; на фиг. 2 - схема движения звеньев автопоезда по круговой траектории после прямолинейного движения; на фиг. 3 - функциональная блок-схема устройства; на фиг. 4 - схема автопоезда на повороте с переменным радиусом при движении задних неповоротных колес звеньев по одной траектории; на фиг. 5 - функциональная блок-схема логического блока; на фиг. 6 - функциональная блок-схема блока коррекции.
Устройство для управления поворотом ведомого звена автопоезда, состоящего из ведущего звена 1 (фиг. 1) с передними поворотными колесами 2 и задними неповоротными колесами 3, ведомого звена 4 с передними поворотными колесами 5 и задними неповоротными колесами 6 и дышла 7, причем база ведомого звена отличается от базы ведущего звена (), содержит функциональный датчик 8 угла поворота передних колес 2 ведущего звена 1, соединенный с информационным входом 9 устройства 10 запаздывания. Управляющий вход 11 устройства 10 запаздывания связан с помощью синхронного привода 12 с задними неповоротными колесами 6 ведомого звена 4.
Второй управляющий вход 13 устройства 10 запаздывания связан через отключающий элемент 14, например электромагнитную муфту, с выходом сумматора 15 скоростей, один из входов которого связан с помощью синхронного привода 16 с задними неповоротными колесами 3 ведущего звена 1, а второй вход - с помощью синхронного привода 12 с задними неповоротными колесами 6 ведомого звена 4. Выход 17 устройства 10 запаздывания соединен с силовым приводом 18 поворота передних колес 5 ведомого звена 4. Выход логического блока 19 онределепия начала и конца коррекции устройства запаздывания и положения ведомого звена 4 на прямолинейном участке пути соединен с управляющим входом отключающего элемента 14 и ключа 20, сигнальнЕ)1Й вход которого соединен
0
5
0
5
0
5
0
с блоком 21 коррекции, а выход - с силовым приводом 18.
В качестве устройства запаздывания может быть применено не только механическое или электромагнитное устройство регулируемого запаздывания, но и электронное. Логический блок 19 служит для возможности определения начала и конца движения автопоезда по прямолинейному участку пути и начала и конца коррекции движения ведомого звена 4 и коррекции работы устройства 10 запаздывания. Этот блок может представлять собой, напри.мер, датчик 22 угла складывания ведущего звена 1 с дышлом 7, соединенный с сигнальным входо.м ключа 23 и с входо.м компаратора 24, имеющего вход настройки 25, выход которого соединен с управляющим входом ключа 23, выход которого соединен с одним из входов сумматора 26, остальные два входа 27 и 28 которого соединены с датчиком 8 угла поворота колес ведущего звена 1 и с выходо.м 17 устройства 10 запаздывания, а выход сумматора 26 соединен с инвертирующим элементом НЕ 29, выход которого является выходом логического блока 19.
Блок 21 коррекции служит для устранения на прямолинейных участках движения автопоезда смещений ведомого звена 4. Этот блок может представлять собой, например, датчик 22 угла складывания ведущего звена 1 с дьдилом 7, сосдипенный с входом усилителя 30, выход которого сое- динеп с одним из входов сумматора ЗК второй вход которого соединен с выходо.м усилителя 32, вход которого соединен с датчиком 33 угла складьшания дьппла 7 с ведомым звеном 4. Выход сумматора 31 является выходом блока 21 коррекции.
Устройство работает следуюп1нм образом.
В процессе движения автопоезда датчик 8 фиксирует угол поворота колес 2, преобразовывает это значение в соответствии с зависимостью
jfati ar-ctg (
- - lgJ6 l,
L 23fc.
где Убых-величина выходного сигнала;
-величина входного сигнала;
LSE - база последующего звепа; Lj,.-база предшествующего звена; и посылает сигнал, пропорциональный этому значению, в информационный вход 9 устройства 10 запаздывапия. Это значение запоминается в носителе информации устройства запаздывания. Скорость передачи информации от входа 9 до выхода 17 регуирует синхронный привод 12 в соответствии со скоростью движения задних колес 6 ведомого звена 4. При движении автопоезда по криволинейной траектории логический блок 19 посылает нулевые сигналы на управляющ,ие входы ключа 20, который
закрыт, и отключающего элемента 14, который обеспечивает евязь второго управляющего 13 с выходом сумматора 15 скоростей, который фиксирует разпость скоростей колес 3 и 6, а значит и изменение расстояния между этими колесами. В соответствии с этим изменением расстояния 10 устройство запаздывания регулирует время задержки сигнала с входа 9 на выход 17, которое равно
Li6 +J(V3-Vs)cit
5з V, V.
-t до колес движепии
движедвиже 3 Vi
где L, - расстояние от колес 3
6 при прямолинейном
автопоезда;
то же, при криволинейном движении;
поступательная скорость
ния колес 3;
поступательная скорость
ния колес 6;
время.
После истечения времени задержки (Т) сигнала устройство запаздывания посылает его в силовой привод 18, который поворачивает передние колеса 5 последующего звена 4 па требуемый угол. В этот момент задние колеса 6 находятся как раз в той точке траектории, в которой находились колеса 3 в момент записи значения угла поворота колес 2 в устройство 0 запаздывания. В результате этого мгновенный радиус поворота колеса 6 равен радиусу кривизны траектории колеса 3 в этой точке, следовательно, нри дальнейшем движении колесо 6 двигается без смещения от траектории колеса 3-. Такая работа устройства поворота осуществляется в каждой точке криволинейной траектории движения. При выходе автопоезда на прямолинейный участок пути логический блок 19 выдает нулевой сигнал, в результате чего отключающий элемент 14 отключает связь выхода сумматора 15 с управляющим входом
0
5
0
5
0
5
13 устройства 10 запаздывания, в котором корректирующие элементы устанавливают время задержки в соответствии с расстоянием от колес 3 до колес 6 нри нрямолиней- ном движении, а также открывает ключ 20. Блок коррекции посылает управляюи ий сигнал в силовой привод 18, который поворачивает колеса 5 для проведения коррек- пии положения ведомого звена 4 с тем, чтобы выставить его вдоль прямолинейного участка пути.
Формула изобретения
Устройство для управ,пения поворотом ведомого звена автопоезда, содержаи ее датчик угла поворота передних колес ведущего звена, силовой привод поворота управ ляемых колес ведомого звена и устройство запаздывания с носителем информации, информацпо1П1ый вход которого соединен с датчиком угла поворота передних колее ведупгего звена, - с силовым приводом, один управляющий вход - с выходом сумматора, а другой управляющий вход - с выходом синхронного привода ведомого звена, соединеппым с одни.м входо.м сумматора, др) гой вход которого соединен с выходом синхронного привода ведущего звена, отличающееся тем, что, с целью улуч- 1пения унравляемости транспортного средства путем обеспечения воз.можности повторения неповорот)1ыми колесами ведомого звена траектории движения неноворотных колес ведуп1.его звена, датчик угла иоворо- та передних колес ведущего звена выполнен с функциональным преобразователем входного сигнала в соответствии со следующей зависимостью:
у ;z: я I С t О (
беых -
величина
--klSto-у .,
1гз f
0
где з бых - величина выходного сигнала; fax - величина входного сигнала; LSS - база ведо.мого звена; 1гз - база ведччцего звена;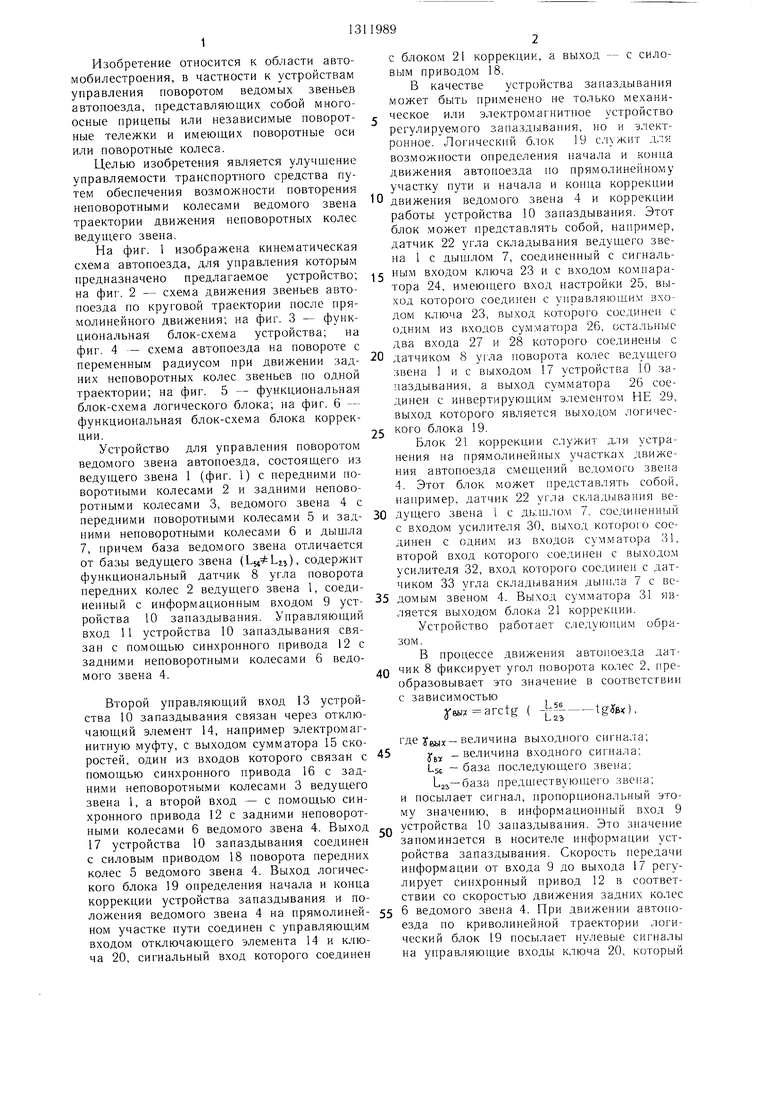
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления поворотом ведомых звеньев автопоезда | 1976 |
|
SU652019A1 |
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
| Устройство для управления задними колесами транспортного средства | 1989 |
|
SU1625756A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МНОГОЗВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2096230C1 |
| Устройство для управления колесами звеньев автопоезда | 1980 |
|
SU867756A1 |
| Способ управления поворотом прицеп-НыХ зВЕНьЕВ АВТОпОЕздА | 1979 |
|
SU844443A1 |
| Устройство для управления поворотом транспортного средства | 1982 |
|
SU1093595A1 |
| Устройство для управления колесами звеньев автопоезда | 1977 |
|
SU765083A2 |
| Устройство для управления поворотом транспортного средства | 1983 |
|
SU1134454A2 |
| Устройство для управления поворотом двухосной тележки полуприцепа | 1987 |
|
SU1482848A1 |
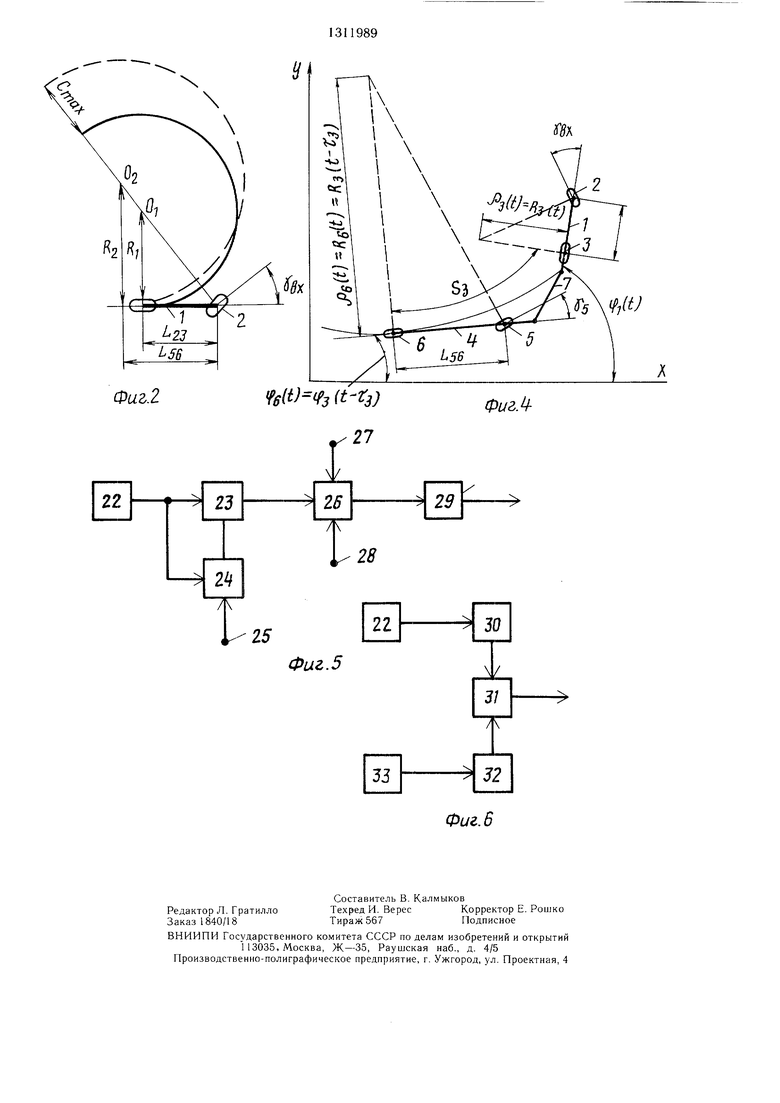
Изобретение относится к устройствам для управления новоротом ведомых звеньев автопоезда, представляющих собой многоосные прицепы или независимые поворотные тележки и имеющих поворотные оси или йоворотные колеса. Цель изобретения - улучщение управляемости транспортного средства путем обеспечения возможности повторения поворотными колесами ведомого звена траектории движения неповоротных колес ведущего звена. Устройство включает датчик 8 угла поворота, выполненный в виде функционального датчика для возможности преобразования вход него сигнала в соответствии со следующей зависимостью: Увых агс1§(Ьбб/Ьгз д . где Увых. величина выходного сигнала; з вх величина входного сигнала; LSS- база после дующего звена; база предыдущего звена. Синхронный привод 16 связывает задние колеса 3 ведущего звена с одним из входов сумматора скоростей 15, а синхронный привод 12 связывает задние неповоротные колеса 6 ведомого звена с вторым входом сумматора скоростей 15 и с первым управляющим входом 11 устройства запаздывания. 6 ил. с (Р (Л со со оо со fe.J
Фиг.1
Фиг.2
(feli)(f3 (3) 27
L
Фиг. 5
ФигЛ
| Устройство для управления поворотом ведомых звеньев автопоезда | 1976 |
|
SU652019A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
