Изобретение относится к области измерения статических нагрузок в системах электропривода подъемных механизмов, подъемно-транспортных и горных машин, в том числе одноковшовых экскаваторов. Изобретение также может найти применение во всех областях техники, где требуется непрерывный автоматический контроль статических нагрузок электропривода.
Наиболее близким решением является способ измерения статического тока, в соответствии с которым статический ток определяется как разность между полным током электрического двигателя и динамическим током, причем динамический ток двигателя получают путем дифференцирования измеренного значения частоты вращения двигателя (скорости перемещения рабочего органа машины). Здесь можно выделить такие существенные признаки: статический ток равен разности между полным и динамическим током; динамический ток пропорционален производной измеренного значения частоты вращения двигателя.
Недостатком способа является низкая динамическая точность измерения, которая обусловлена принципиально неустранимым запаздыванием информации о производной скорости рабочего органа машины при изменении движущегося момента, существенным влиянием гистерезисных явлений в стали электрических машин на показатели точности измерения, необходимостью определять значение производной частоты вращения двигателя. Кроме того, необходимость измерения производной снижает помехоустойчивость способа измерения.
Цель изобретения повышение точности измерения статического тока электрического двигателя в динамических режимах работы электропривода.
Указанная цель достигается повышением точности измерения динамического тока двигателя, который определяется как величина, пропорциональная разности напряжения питания электродвигателя и величины, пропорциональной интегралу динамического тока электрического двигателя. Статический ток электропривода определяется как разность между полным и динамическим током.
Отличительными признаками предлагаемого способа являются следующие:
использование новой переменной для измерения динамического тока, а именно напряжения преобразователя для питания электродвигателя;
новая совокупность действий по измерению динамического тока, которая состоит в вычитании из величины, пропорциональной измеренному значению напряжения питания электродвигателя, величины, пропорциональной интегралу динамического тока электрического двигателя;
исключение операции дифференцирования.
Совокупность перечисленных отличительных признаков обеспечивает существенное повышение точности измерения статического тока электропривода.
На фиг. 1 показана функциональная схема устройства, реализующего способ измерения статического тока в системе электропривода. Силовая часть системы электропривода состоит из преобразователя 1 для питания электродвигателя 2. Измерительная система содержит датчик 3 напряжения преобразователя, выход которого соединен с первым входом сумматора 4 для определения динамического тока, и датчик 5 полного тока двигателя, выход которого подключен в первому входу сумматора 6 для определения статического тока. Выход сумматора 4 соединен с входом усилителя 7, выход которого подключен к второму входу сумматора 6 и входу интегратора 8, причем выход последнего соединен с вторым входом сумматора 4.
Возможность реализации способа и устройства подтверждается широкой номенклатурой технических средств измерения напряжения питания электродвигателя, полного тока двигателя, интегрирования и суммирования сигналов.
Сравнение предлагаемого способа с известным выполнено путем моделирования переходных и установившихся режимов работы электропривода подъема ковша экскаватора ЭКГ-5А.
Использованы следующие уравнения, описывающие электропривод подъема ковша.
Магнитный усилитель:
Eму = 7,27I
Генератор типа 2ПЭМ 2000 М-1У2:
d•awнез/dt (EMу awнез)/Tнез,
d•awшунт/dt (0,291•Eg awшунт)/ Tшунт,
aw awнез + awшунт,
Eg 0,403•aw3 1,63•aw2 + 2,29•aw - 0,0208.
Якорная цепь контура генератора двигатель:
Ia = 6,24(Eg-ωдвΦдв).
Магнитная цепь двигателя ДЭ 816 У2
Φдв = -0,0659i
Вращающиеся массы двигателя:
dωдв/dt = 2,24(IaΦдв-M12).
Упругое звено канат:
M12 = C12∫(ωдв-ω2)dt+b12(ωдв-ω2).
Ковш и рукоять:
dω2/dt = 12,4(M12-Mстат).
Все переменные нормированы. Значение момента статического сопротивления принято равным 0,4 от стопорного.
Таким образом, в модели учтены все существенные нелинейности, а именно кривые намагничивания магнитного усилителя, генератора, электродвигателя, а также учтены все существенные постоянные времени.
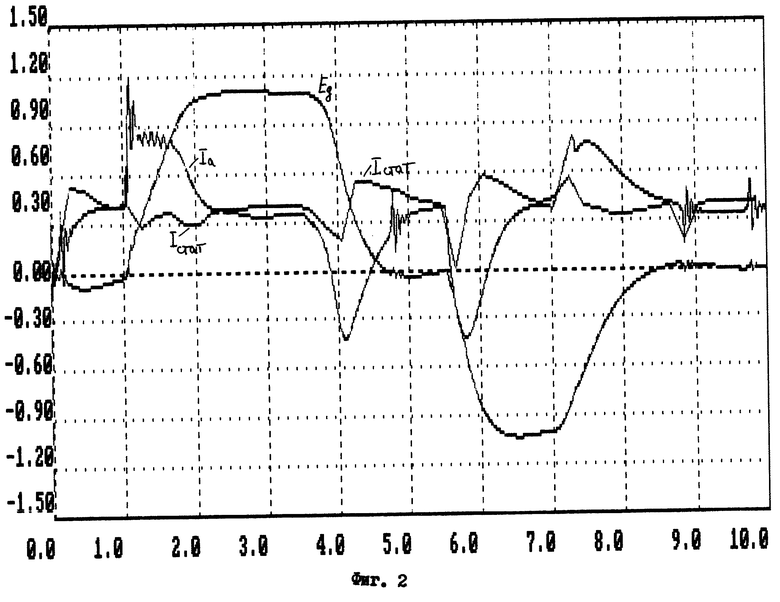
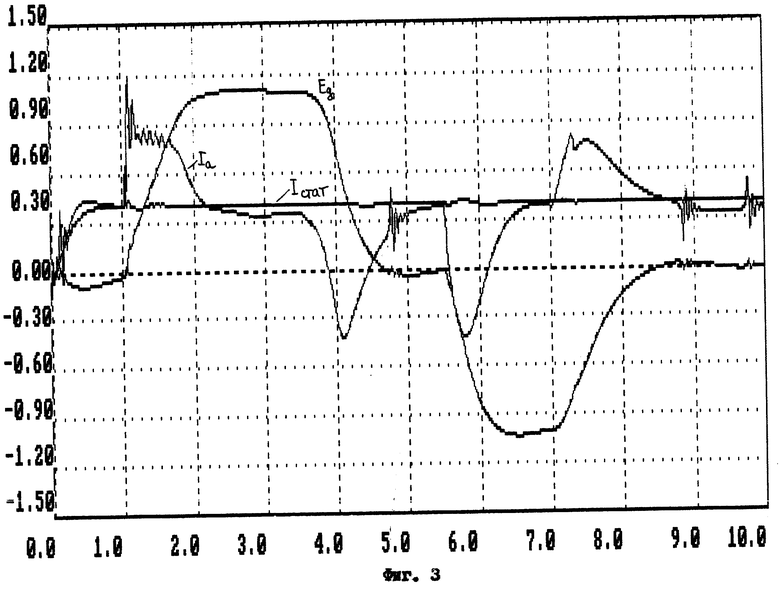
На фиг.2 и 3 показаны графики изменения напряжения генератора Eg и тока якорной цепи Ia в переходных и установившихся режимах работы электропривода и значения статического тока Iстат, определенного в соответствии с известным методом (фиг. 2) и предлагаемым методом (фиг.3). Из графиков видно, что известный метод не обеспечивает удовлетворительного решения задачи измерения статического тока. Предлагаемый метод позволяет точно измерить статический ток электропривода.
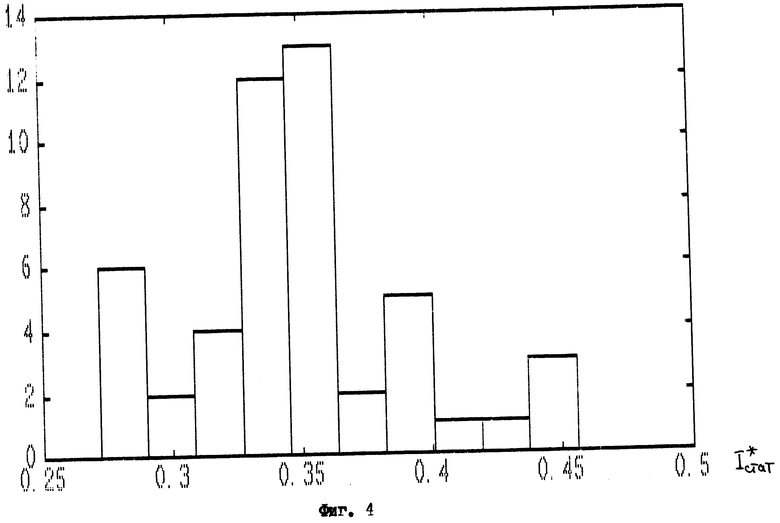
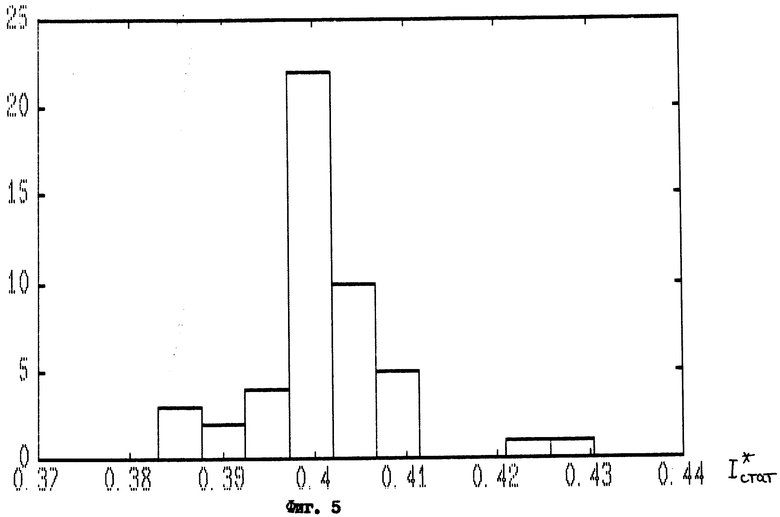
На фиг. 4 и 5 представлены гистограммы выборки измеренных значений статического тока, полученные соответственно известным и предлагаемым методами.
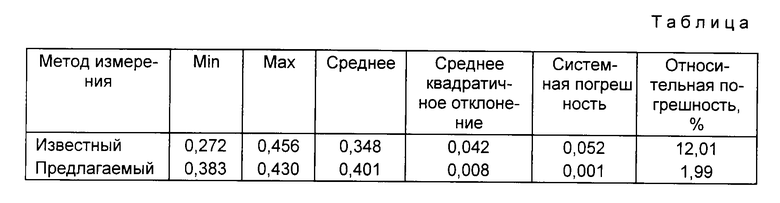
В таблице приведены результаты обработки гистограмм.
Таким образом, предлагаемый метод измерения позволяет на порядок улучшить показатели измерения статического тока электропривода по сравнению с известным методом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления возбуждения электродвигателя постоянного тока | 1980 |
|
SU892634A1 |
| Датчик статической и динамической составляющих тока электродвигателя постоянного тока | 1981 |
|
SU945813A1 |
| Устройство для определения статического момента двигателя | 1991 |
|
SU1789887A1 |
| Способ пуска электродвигателя цилиндрической конструкции на радиальных упругих опорах | 1986 |
|
SU1337979A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод постоянного тока станка-качалки | 1981 |
|
SU1026268A1 |
| Электропривод с оптимальным управлением | 1985 |
|
SU1339854A1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| Способ старт-стопного управления шаговым двигателем | 1986 |
|
SU1363417A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
Изобретение относится к области электропривода и автоматизации землеройных и подъемно-транспортных машин. Сущность изобретения: способ осуществляют путем определения разности между полным и динамическим током электродвигателя. Динамический ток определяется как разность между величиной, пропорциональной измеренному значению напряжения питания электродвигателя, и величиной, пропорциональной интегралу динамического тока электрического двигателя. Устройство, реализующее способ, содержит датчик полного тока двигателя, выход которого подключен к первому входу сумматора для определения статического тока, датчик напряжения преобразователя, выход которого соединен с первым входом сумматора для определения динамического тока, и усилитель, вход которого подключен к выходу сумматора для определения динамического тока. Выход усилителя подключен к второму входу сумматора для определения статического тока и входу интегратора. Причем выход интегратора подключен к второму входу сумматора для определения динамического тока. 2 с.п. ф-лы, 5 ил., 1 табл.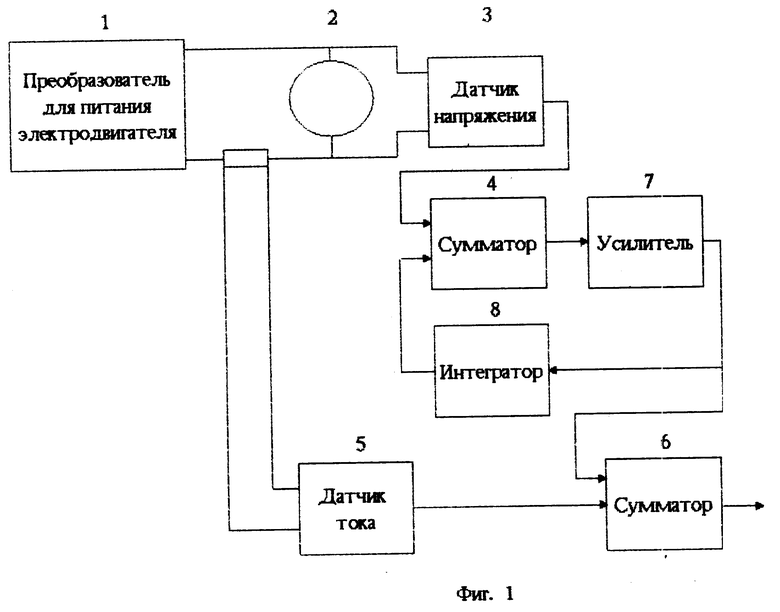
| Каминская Д.А., Базилевский В.Г., Григорьева М.Н | |||
| Управление электроприводом с упругими связями | |||
| - Электротехника, 1974, N 3, с | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
