Изобретение относится к машиностроению, может быть использовано для манипуляторов и робототехнических устройств, и является усовершенствованием известного устройства по а.с. СССР N 927486.
В основном изобретении по а.с. СССР N 927486 описано устройство схвата манипулятора. Это устройство содержит корпус, телескопическое звено, электромагнитные фиксаторы, шток с рейками, причем электромагниты фиксаторов расположены на штоке, губки, кинематически связанные с рейками штока. Привод схвата, который выполнен вращательным, установлен на нижней части корпуса и кинематически связан с рейками штока.
Недостатком основного изобретения являются поперечные габариты и масса, сложность конструкции и низкая технологичность изготовления.
Целью дополнительного изобретения является уменьшение поперечного габарита и массы, упрощение конструкции.
Поставленная цель достигается тем, что в схвате манипулятора по а.с СССР N 927486 электромагниты фиксаторов выполнены в виде тяговых электромагнитов, размещены в телескопическом звене соосно с фиксаторами, при этом по оси электромагнитов выполнены отверстия, в которых размещены фиксаторы, а шток выполнен в виде двусторонней зубчатой рейки, при этом пружины фиксаторов размещены внутри электромагнитов.
Основным отличием предлагаемого схвата от схвата прототипа является то, что в первом электромагниты фиксаторов выполнены в виде тяговых электромагнитов, установленных в телескопическом звене и расположенных поперек хода звена, причем сами фиксаторы являются подвижными якорями этих электромагнитов. Вследствие этого уменьшаются поперечные габариты и масса схвата манипулятора, т.к. отпадает необходимость размещения электромагнитов фиксаторов на штоке, как делалось в прототипе. Кроме того, шток в заявляемом устройстве предлагается делать в виде плоской двусторонней зубчатой рейки, а не размещать две рейки на штоке, как в прототипе. Вследствие этого упрощается конструкция схвата, повышается технологичность его изготовления и сборки.
На момент подачи заявки авторам неизвестны устройства схвата манипулятора, описанные в патентной и научно-технической литературе, имеющие столь простое техническое исполнение и высокие массогабаритные показатели. Нет так же сведений об открытом применении подобного устройства. Это позволяет сделать вывод о соответствии заявляемого технического решения критерию "новизна".
Таким образом, благодаря размещению электромагнитов в телескопическом звене и выполнению штока в виде двусторонней зубчатой рейки объект проявляет свойства, которые не предъявляются ни в одном и известных решений. Исходя из этого, можно заключить, что данное решение соответствует и критерию " существенные отличия".
На фиг. 1 изображен общий вид схвата; на фиг. 2 то же, вид сверху.
Схват манипулятора содержит корпус 1, внутри у которого расположено телескопическое звено 2. На конце звена 2 шарнирно установлены губки 3 с закрепленными на них шестернями 4. Шестерни 4 находятся в зацеплении со штоком 5, выполненным в виде двусторонней зубчатой рейки, который расположен внутри телескопического звена 2. На нижней части корпуса 1 установлен привод 6 вращения, кинематически связанный со штоком 5 через шестерни 7 и 8.
Корпус 1 снабжен зубчатыми рейками 9, а на телескопическом звене 2 установлены тяговые электромагниты 10, фиксаторы 11, являющиеся якорями электромагнитов 10 и пружины 12, которые соединены с фиксаторами 11 и закреплены внутри электромагнитов 10.
Схват работает следующим образом.
При обеспеченном электромагните 10 пружины 12 обеспечивают сцепление фиксаторов 11 с рейками 9 корпуса 1. В этом случае при включении привода 6 вращающий момент через шестерни 7 и 8 передается на штоке 5. В результате этого шток 5 перемещается относительно телескопического звена 2 и осуществляется разведение или сжатие губок схвата 3, которые кинематически связаны со штоком 5 с помощью шестерен 4.
При подаче напряжения на электромагниты 10 фиксаторы 11 выйдут из зацепления с рейками 9 корпуса 1 и войдут в зацепление со штоком 5. В этом случае при включении привода 6 вращающий момент через шестерни 8 т 7 передается на шток 5, который при включении электромагнита 10 жестко связан с телескопическим звеном 2, и вызывает перемещение этого телескопического звена.
Таким образом, благодаря размещению тяговых электромагнитов 10 в телескопическом звене 2 и ориентированных поперек хода звена 2, а так же выполнению штока 5 в виде двусторонней зубчатой рейки удалось повысить массогабаритные характеристики схвата и упростить его конструкцию.
Практическая реализация предлагаемого устройства не вызывает затруднений, т.к. требует наличия типовых механизмов и устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1979 |
|
SU927486A1 |
| Схват манипулятора | 1978 |
|
SU703323A1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| Копирующий манипулятор | 1980 |
|
SU946918A1 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| Захватное устройство робота | 1987 |
|
SU1423373A1 |
| Захватное устройство | 1987 |
|
SU1530437A1 |
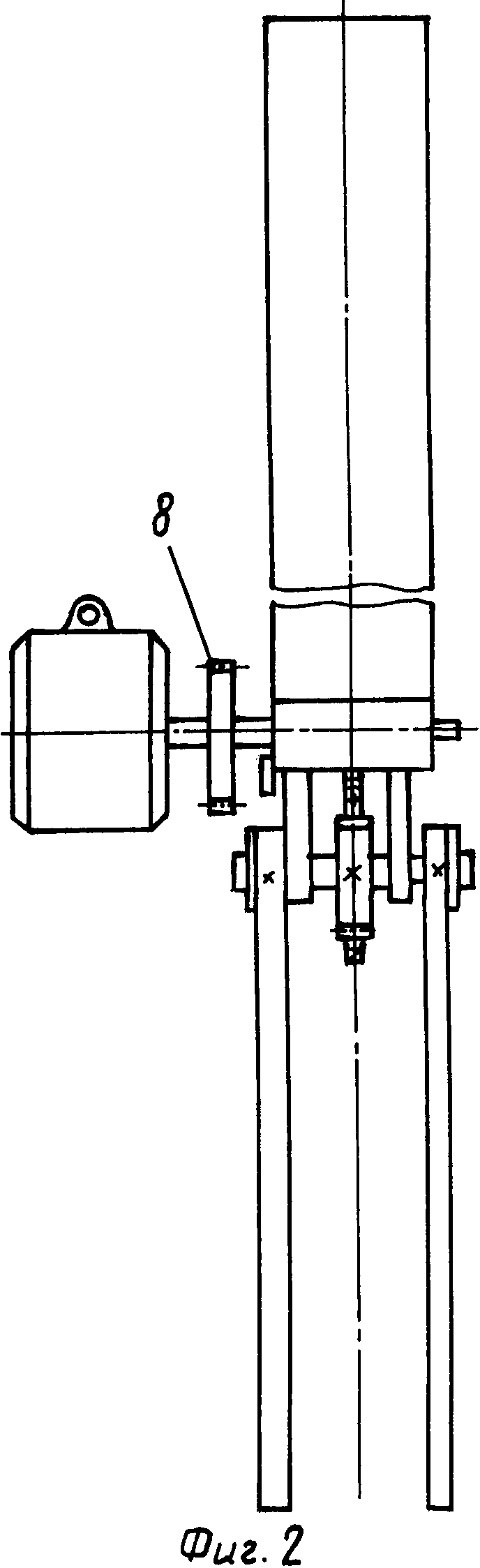
Использование: машиностроение, в захватных органах манипуляторов. Сущность изобретения: схват содержит полый корпус 1, телескопическое звено 2, электромагнитные фиксаторы 11, шток 5 с зубчатыми рейками, захватные губки 3 и привод 6. Телескопическое звено 2 и шток 5 установлены внутри корпуса соосно друг друга. А электромагнитные фиксаторы 11 расположены между ними и установлены с возможностью попеременного взаимодействия с корпусом 1 и штоком 5. При этом электромагниты 10 установлены на телескопическом звене коаксиально фиксатором 11. При обесточенном электромагните 10 обеспечивается сцепление фиксаторов 11 с корпусом 1. В результате этого шток 5 перемещается относительно телескопического звена 2 и осуществляется разведение или сжатие губок 3. При подаче напряжения на электромагниты 10 фиксаторы 11 войдут в зацепление со штоком 5. В этом случае при включении привода 6 происходит перемещение телескопического звена 2. 2 ил.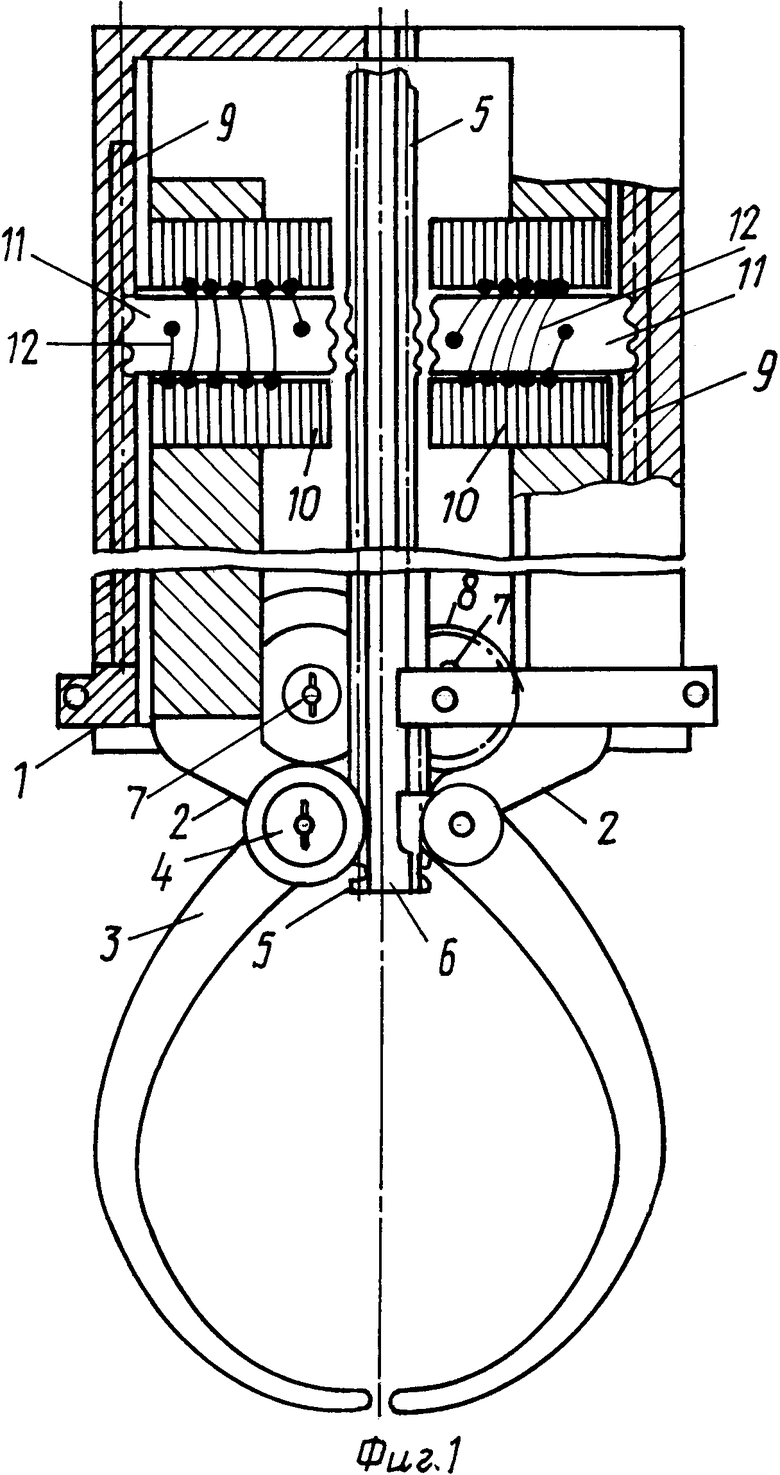
Схват манипулятора, содержащий полый корпус, телескопическое звено, электромагнитные фиксаторы, шток с зубчатыми рейками, захватные губки и привод, причем телескопическое звено и шток установлены внутри корпуса соосно друг другу, а электромагнитные фиксаторы расположены между ними таким образом, что их продольная ось перпендикулярна продольной оси корпуса, и установлены с возможностью попеременного взаимодействия с корпусом и штоком, при этом привод и захватные губки кинематически связаны с рейками штока, отличающийся тем, что, с целью уменьшения габаритов и упрощения конструкции, электромагниты установлены на телескопическом звене коаксиально фиксаторам.
| Схват манипулятора | 1979 |
|
SU927486A1 |
