ком 2, взаимодействующего с зубчаты- Ии рейками 3 и 4, на которых закреплены губки 5 и 6. Регулируемые опоры 9 и 10 вьтолнены в виде стержней, каждый из которых взаимодействует с шариками 11, расположенными в замкнуИзобретение относится к машиностроению, в частности к захватным устройствам промьгашенных роботов и манипуляторов, и может быть использовано в гибких автоматизированных производствах.
Цель изобретения - автоматизация переналадки схвата для захвата различных по размерам деталей за счет снабжения схвата устройством переналадки.
На фнг,1 изображен схват, вид сверху; на фиг.2 - вид А на фиг.1.
Схват состоит из силового цилиндра 1 с плоским штоком 2, на поверхностях которого нанесены косые зубья, входящие в зацепление с соответствующими зубьями реек 3 и 4, губок 5 и 6, смонтированных на рейках 3 и 4, имеющих упорные выступы 7 и пазы 8, и упоров, выполненных в виде расположенных по оси симметрии схвата двух упорных стержней 9 и 10, каждый из которых кинематически связан с одной из групп калиброванных шариков 11 , установленных в двух идентичных корпусах 12, имеющих по два сквозных канала: один - для прохода упорных стержней 9 (Ю), а другой - для перемещения калиброванных щариков 1 1 , причем каналы для перемещения шариков 11 вьтолнены замкнутьми,
В нижней части корпусов 12 размещены пл астины 13, жестко закрепленные на упорных стержнях 9 и 10 и взаимодействующие с шариками 11. В каждом из корпусов 12 жестко закреплены фиксаторы шариков 11. Фиксаторы имеют корпус 14, шток-фиксатор 15, входя- щий своим плоским концом в канал между шариками 11, упор 16 фиксатора, возвратную пружину 17 и расположенные на корпусе 14 два микропереклютом канале корпуса 12. На каждом корпусе 12 расположен фиксатор перемещения шариков в канале, а на упорах 9 и 10 расположены устройства временной фиксации упоров 9 и 10 на губках 5 и 6о 2 ил.
чателя 18 и 19, взаимодействующие с упором 16 фиксатора.
На упорных стержнях 9 и 10 размещены устройства временной фиксации
упорных стержней 9 и 10 на губках 5 и 6. Устройства временной фиксации упорных стержней 9 и 10 могут быть выполнены в виде электромагнитов 20, содержащих сердечники-упоры 21, являюшиеся ограничителями раскрытия и сведения губок 5 и 6, и возвратные пружины 22, связанные с сердечниками- упорами 21 .
Схват работает следующим образом,
В исходном положении губки 5 и 6 разведены. При подаче рабочей среды в силовой цилиндр 1 шток 2 выдвигается, заставляя перемещаться рейки 3 и 4 и закрепленные на них губки 5 и 6
навстречу друг другу. Регулировка величины раскрытия губок 5 и 6 осуществляется в их исходном положении.
Для ограничения хода губок 5 и 6 подается рабочая среда в корпус 14 фиксатора шариков 11, давление которой перемещает щток-фиксатор 15 из канала для прохода шариков 11. Через микропереключатель 18 включается привод устройства для временной фиксации
упорного стержня 9 на губке 5, например электромагнит 20, его сердечник- упор 21 выдвигается из электромагнита 20 и входит в паз 8 губки 5, затем губки 5 устанавливаются в необходимое
положение.
Фиксация упорного стержня 9 в корпусе 12 осуществляется после прекращения подачи рабочей среды в полость корпуса фиксатора шариков 11, при этом шток-фиксатор 15 под действием упругого элемента, например возвратной пружины 17, стопорит калиброванные шарики 11 в канале для их прохож313084
дения. После фиксации упорного стержня 9 в корпусе 12 электромагнит 20 через микропереключатель 19 отключается, выдвигая с помощью пружины 22 электромагнита сердечник-упор 21 из паза 8 губки 5. При дальнейшей работе схвата сердечник-упор 21 становится внешним упором губки 5.
Регулировка величины сведения губок 5 и 6 осуществляется аналогично. С помощью штока-фиксатора 15 и устройства временной фиксации упорного стержня 10 на губке 6, например электромагнита 20, заданное положение губок 5 и 6 автоматически фиксируется губкой 6 через упорный стержень 10, После регулировки заданной величины сведения губок 5 и 6 сердечник-упор 21 превращается во внутренний упор губки 5.
0
5
0
4 Формула изобретения
Схват промышленного робота, содержащий губки, смонтированные на зубчатых рейках, кинематически связанных с силовым цилиндром, упоры, отличающийся тем, что, с целью автоматизации переналадки схвата для захвата различных типоразмеров деталей, он снабжен по крайней мере двумя устройствами переналадки схвата, каждый из которых вьшолнен в виде расположенных в замкнутых каналах корпуса: калиброванных шариков и подвижного штифта, имеющего возможность расположения в канале, а упоры выполнены в виде стержней, на одних концах которых смонтированы дополнительно введенные пластины с возможностью взаимодействия с шариками, а на других - дополнительно введенные фиксаторы положения стержней относительно губок.

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Устройство для накопления и поштучной выдачи заготовок | 1983 |
|
SU1184590A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Схват промышленного робота | 1986 |
|
SU1364472A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Схват промышленного робота | 1984 |
|
SU1199616A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Захватное устройство | 1985 |
|
SU1316814A1 |
| Манипулирующее устройство | 1983 |
|
SU1146194A2 |
Изобретение относится к области машиностроения, в частности к захватным устройствам промышленных роботов и манипуляторов. Цель изобретения - автоматизация переналадки схвата для захвата различных типоразмеров деталей за счет снабжения схвата устройством переналадки. Схват состоит из приводного цилиндра с зубчатым што(Л Фиа1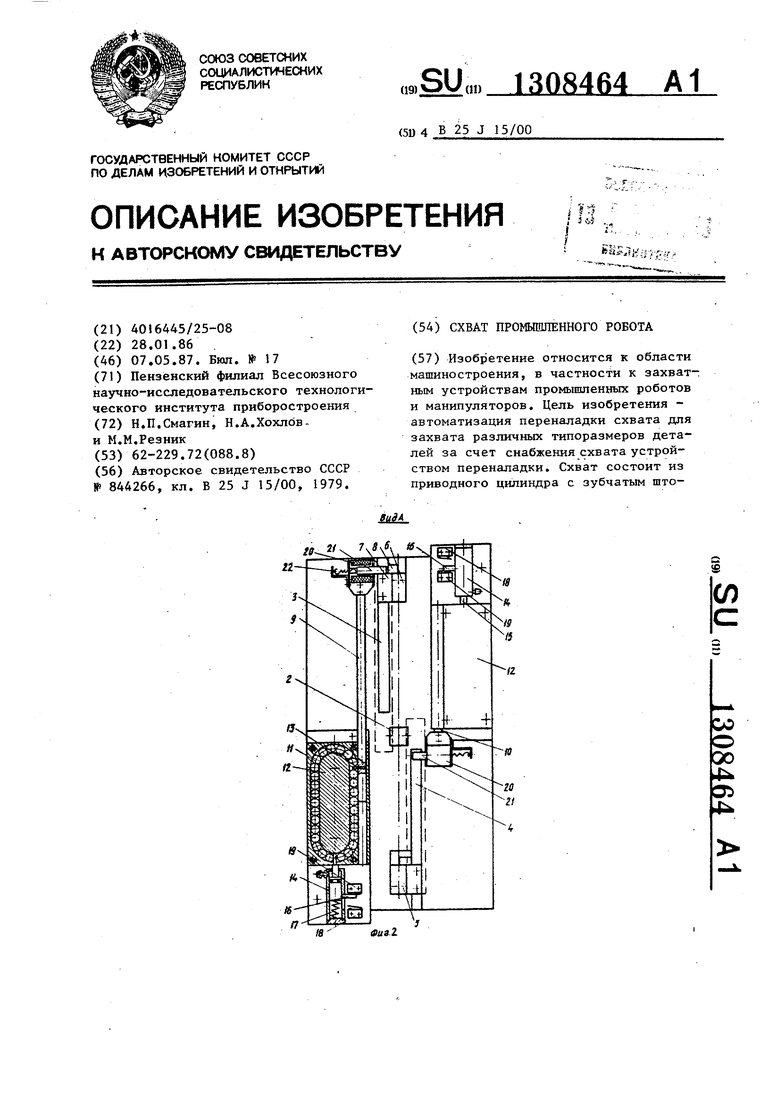
Редактор И. Шулла
Фиг.1
Составитель А.Черньшгев
Техред Л.Сердажова Корректор Т.Колб
Заказ 1664/13Тираж 954 Подписное
ВНПИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Схват промышленного робота | 1979 |
|
SU844266A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
