Изобретение относится к машиностроению, а именно к схватам манипуля- i|opoB, и может быть использовано для 1|адежного захвата и транспортировки Деталей.
I Целью изобретения является расширение технологических возможностей ;а счет обеспечения автоматической настройки захватного устройства ротота на требуемый типоразмер детали и гювьшение быстродействия работы схва та за счет минимального пе1)емещения 1 убок при захвате детали. j На чертеже представлено захватное устройство, общий вид. I Захватное устройство содержит корпус 1, привод 2 линейного перемещения, шарнирно закрепленные на корпусе 1 двуплечие захватные рычаги 3, парнирно связанные через шатуны А со ИТОНОМ 5 привода 2 захватного устройства.
i На корпусе 1 жестко закреплена s.i; (убчатая рейка 6 с возможностью расположения в продольном канапе штока привода 2 захватного устройства. $ поперечном канале штока 5 установлен фиксатор 7, шарнирно связанный с одним концом звена 8, а другой конец звена 8 шарнирно связан с ползу- юм 9 привода фиксатора 7, Ползун 9 привода фиксатора 7 установлен в продольном пазу одного из захватных ры- jiaroB 3 и подпружинен относительно пружиной 10.
Захватное устройство работает сле- | ую1дим образом.
I Захват вводится в рабочую зону. tipH подаче рабочей среды в штоковую юлость привода 2 шток 5, перемещаясь |iepe3 шатуны 4, воздействует на дву- |(и1ечие захватные рычаги 3, которые, Ьближаясь, захватывают деталь. При |(вижении штока 5 фиксатор 7 скользит tto зубчатой рейке 6, В момент захвата детали фиксатор 7 находится в одном
из пазов между зубьями рейки 6. При отпускании детали привод 2 совершае обратное движение, при этом захватные рычаги разжимаются до тех пор, пока фиксатор 7 не упрется в ближайший зуб рейки 6. При этом диапазон рабочего перемещения захватных рычагов минимален. При захвате деталей большего, по сравнению с предыдущим размера захват подводится к детали и касается ее поверхности торцами захватных рычагов 3. При этом ползун 9, перемещаясь , выводит фиксатор 7 из зацепления с зубьями рейки 6, это дает возможность приводу 2 перемещать захватные рычаги до тех пор, пока торцовая часть не потеряет контакт с деталью и фиксатор не войдет в зацепление с зубчатой рейкой 6.
Формула изобретения
З
25
30
0
Захватное устройство робота, со- держащее корпус, на котором шарнирно установлены двуплечие захватные рычаги, на одном конце каждого из которых закреплены губки, а другое кинематически связано со штоком привода, отличающееся тем, что, с целью расширения технологических возможностей и повьш1ения быстродействия, оно снабжено фиксирующим уст- ройством, состоящим из жестко закрепленной на корпусе зубчатой рейки, фиксатора и ползуна, а в штоке выполнены продольные и поперечные ка- калы, при этом зубчатая рейка имеет возможность расположения в продольном канале штока и взаимодействия с фиксатором, расположенным в поперечном канале щтока и кинематически связанным с, ползуном, подпружиненным относительно одного из захватных рычагов и расположенным в дополнительно выполненном пазу этого рычага.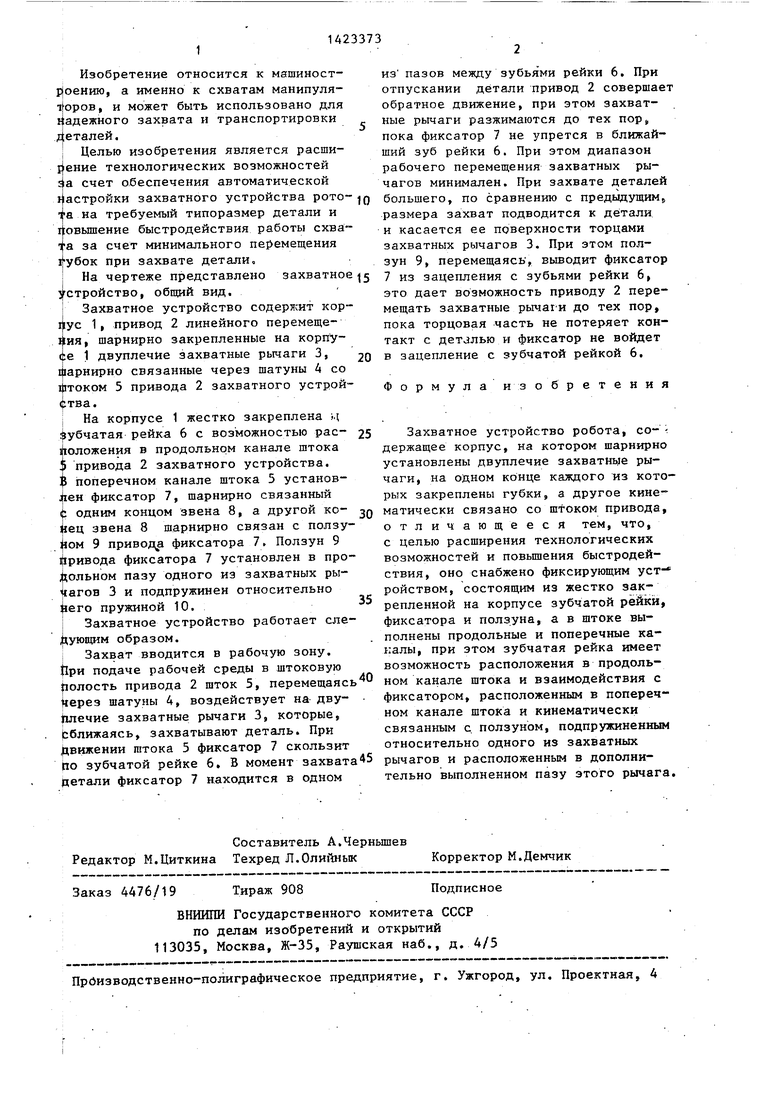
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1981 |
|
SU946744A1 |
| Устройство для перемещения деталей от пресса | 1986 |
|
SU1388161A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Схват промышленного робота | 1986 |
|
SU1335451A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Схват | 1985 |
|
SU1289679A1 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
Изобретение относится к области машиностроения, а именно к схватам манипуляторов, и может быть использовано для надежного захвата и транспортировки деталей. Целью изобретения является обеспечение, автоматической настройки захватного устройства робота на требуемый типо°размер детали и повышение быстродействия работы схвата за счет минимального перемещения губок при захвате детали. Устройство содержит корпус 1, привод 2, двуплечие захватные рычаги 3, шарнирно закрепленные на корпусе. На корпусе 1 жестко закреплена зубчатая рейка 6, расположенная в предельном канале штока 5 привода 2. В поперечном канале штока 5 установле фиксатор 7, шарнирно связанный с ползуном 9 через промежуточное звено 8. Ползун 9 установлен в продольном пазу одного из захватных рычагов 3 и подпружинен относительно него пружиной 10, При захвате деталей шток 5 привода 2, перемещаясь, воздействует на захватные рычаги 3 через шатуны 4. При движении штока 5 фиксатор 7 скользит по зубьям рейки 6. В момент захвата детали фиксатор 7 находится в одном из пазов между зубьями рейки 6. При отпускании детали захватные рычаги 3 разжимаются до тех пор, пока фиксатор 7 не упрется в ближайший зуб рейки 6. При захвате деталей большого размера захват подводится к детали, при этом торцы захвата упираются в него. При этом ползун 9, перемещаясь, выводит фиксатор 7 из t зацепления с зубьями рейки 6, что дает возможность приводу 2 разводить захватные рычаги 3 до тех пор, пока их торцовая часть не потеряет контакт с деталью. 1 ил. и 4 Ю О5 СО СлЭ i ,.
Составитель А.Черньш1ев Редактор М.Циткина Техред Л.Олийнык Корректор М.Демчик
Заказ 4476/19
Тираж 908
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Захватное устройство | 1984 |
|
SU1206080A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
