Изобретение относится к области управления и регулирования и, в частности к области контроля и управления автоматизированными комплексами с использованием электрических сигналов в роботизированных производствах.
Известны системы управления подвижными циклически заменяемыми объектами (рабочими органами), содержащие задатчик управления, включенные по замкнутому контуру аппаратуру выделения координат объекта управления (рабочего органа) автоматизированного робототехнического комплекса, устройство выработки и передачи команд и объект управления с приводом (Вукобратович М., Стокич Д., Кирчански Н. Неадаптивное и адаптивное управление манипуляционными роботами - М. Мир .: 1989 с. 363 Рис. 5.17 "B").
Для контроля систем управления применяют устройства контроля, содержащие индикаторы, сумматоры, компараторы, элементы "И" и "ИЛИ" (авт. св. СССР N 1173395 А.Н.Зюбан и Н.К.Терехов Устройство для диагностирования радиоэлектронного объекта опубл. 15.08.85. кл. G 05 B 23/03).
Известны также системы совместного управления и контроля, имеющие высокие показатели надежности функционирования (патент США N 3633087 Метод и устройство электронного задания и контроля траектории движения механизма, управляемого цифровыми командами, кл. G 05 B 23/02, публикация 1972, январь 4, том 894, N 1).
Однако названные системы функционируют при надежной связи объекта управления и аппаратуры выделения координат объекта и не предназначены для эффективной работы в условиях неполной информации об объекте.
В качестве прототипа выбрана система управления и контроля механизма автоматизированного комплекса (Изделие 1В554. Схема соединений, инв. N 6/46, КБП, г. Тула, 1989), содержащая задатчик управления, включенные по замкнутому контуру аппаратуру выделения координат объекта, устройство выработки и передачи команд и объект управления, а также базовую установку с датчиком схода, систему автоматики с ключом пуска, инвертор, сумматор, таймер, компаратор, задатчик контроля, прерыватель, первый элемент "ИЛИ", первый индикатор, пульт механика, систему навигации, причем выход ключа пуска подключен ко второму входу аппаратуры выделения координат, к базовой установке и ко входу таймера, первый вход аппаратуры выделения координат связан с объектом управления, первый, второй, третий и четвертый входы устройства выработки и передачи команд подключены к соответствующим выходам аппаратуры выделения координат, а седьмой, восьмой и девятый входы этого устройства - к первому, второму и третьему выходам задатчика управления, выход датчика схода подключен к шестому входу устройства выработки и передачи команд и ко второму входу прерывателя, вход инвертора подключен к третьему выходу задатчика управления, а выход через первый выход сумматора подключен к первому входу компаратора, второй вход компаратора подключен к задатчику контроля, а выход компаратора - к первому входу первого элемента "ИЛИ", второй вход сумматора подключен к третьему выходу аппаратуры выделения координат, выход таймера через первый вход прерывателя подключен ко второму входу первого элемента "ИЛИ", третий вход первого элемента "ИЛИ" подключен к четвертому выходу задатчика управления, а выход первого элемента "ИЛИ" подключен к пятому входу устройства выработки и передачи команд и к первому индикатору.
Одновременно с управлением объектом осуществляется контроль за правильностью отработки заданий с задатчика управления и за работоспособностью объекта, проявляющейся в своевременном рассоединении объекта управления и базовой установки.
Недостатком указанной системы управления и контроля является значительная нагрузка на человека-оператора по принятию решений либо о включении следующего цикла работы автоматизированного робототехнического комплекса со следующим циклически заменяемым объектом управления, либо о проведении ремонта системы. В прототипе отсутствует сигнал по выбору того или иного режима дальнейшей работы комплекса.
Целью настоящего изобретения является повышение быстродействия и эффективности работы системы автоматизированного комплекса. Цель достигается путем выработки сигнала "Повторный пуск" и индикации его для человека-оператора, а также индикации для человека-оператора причин прекращения управления в завершившемся цикле работы. Сущность предлагаемого изобретения заключается в том, что в известную систему управления и контроля автоматизированного комплекса, содержащего задатчик управления, включенные по замкнутому контуру аппаратуру выделения координат объекта, устройство выработки и передачи команд и объект управления, а также базовую установку с датчиком схода, систему автоматики с ключом пуска, инвертор, сумматор, таймер, компаратор, задатчик контроля, прерыватель, первый элемент "ИЛИ", первый индикатор, причем выход ключа пуска подключен ко второму входу аппаратуры выделения координат, к базовой установке и по входу таймера, первый вход аппаратуры выделения координат связан с объектом управления, первый, второй, третий и четвертый входы устройства выработки и передачи команд подключены к соответствующим выходам аппаратуры выделения координат, а седьмой, восьмой и девятый входы этого устройства - к первому, второму и третьему выходам задатчика управления, выход датчика схода подключен к шестому входу устройства выработки и передачи команд и ко второму входу прерывателя, вход инвертора подключен к третьему выходу задатчика управления, выход инвертора через первый вход сумматора подключен к первому входу компаратора, второй вход компаратора подключен к задатчику контроля, а выход компаратора - к первому входу первого элемента "ИЛИ", второй вход сумматора подключен к третьему выходу аппаратуры выделения координат, выход таймера через первый вход прерывателя подключен ко второму входу первого элемента "ИЛИ", третий вход первого элемента "ИЛИ" подключен к четвертому выходу задатчика управления, отличающаяся тем, что введены второй, третий и четвертый индикаторы, первый и второй элементы "И", второй элемент "ИЛИ" и линия задержки, при этом первый вход первого элемента "И" соединен с выходом первого элемента "ИЛИ", а его второй входа - с четвертым выходом аппаратуры выделения координат, выход первого элемента "И" соединен с первым входом второго элемента "И", второй вход которого соединен с выходом компаратора, а выход второго элемента "И" - с первым входом второго элемента "ИЛИ", второй вход которого подключен к выходу прерывателя, линия задержки установлена между первым элементом "ИЛИ" и пятым входом устройства выработки и передачи команд, выход второго элемента "ИЛИ" подключен к первому индикатору, четвертый выход задатчика управления - ко второму индикатору, выход прерывателя - к четвертому индикатору, выход компаратора - к третьему индикатору.
Достоинством предлагаемого изобретения является реализация нового критерия контроля функционирования автоматизированного комплекса, характеризующего целесообразность включения следующего цикла работы с объектами управления.
На чертеже изображена функциональная схема системы управления и контроля автоматизированного комплекса.
Здесь обозначены
1 - задатчик управления,
2 - аппаратура выделения координат объекта,
3 - устройство выработки и передачи команд,
4 - объект управления,
5 - базовая установка,
6 - датчик схода,
7 - система автоматики с кнопкой пуска,
8 - инвертор,
9 - сумматор,
10 - компаратор,
11 - задатчик контроля (определяет допустимые отклонения объекта от требуемой траектории),
12 - таймер,
13 - прерыватель,
14 - первый элемент "ИЛИ",
15 - первый элемент "И",
16 - второй элемент "И",
17 - второй элемент "И",
18 - линия задержки,
19,20,21,22 - первый, второй, третий и четвертый индикаторы.
Система управления и контроля имеет циклический режим функционирования и работает следующим образом.
В исходном положении перед каждым циклом работы объект управления 4 находится на базовой установке 5, датчик схода 6 - нормально разомкнут. Начальным действием цикла является замыкание ключа пуска в системе автоматики 7.
По сигналу с ключа пуска базовая установка 5 приводит в движение объект управления 4 и включается таймер 12. После рассоединения базовой установки 5 и объекта управления 4 срабатывает датчик скола 6, сигнал с него через шестой вход поступает в устройство выработки и передачи команд 3 и через второй вход прерывателя 13 блокирует выход таймера 12 на отмену управления объектом 4.
Если время рассоединения объекта управления 4 и базовой установки 5 превысит допустимый временный показатель, таймер 12 вырабатывает и через нормально замкнутый прерыватель 13 передает сигнал на первый элемент "ИЛИ" (14) по сбросу управления данным объектом, с выхода прерывателя 13 сигнал также поступает на индикатор 22 и сигнализирует о неудовлетворительной работе объекта управления 4, проявившейся в несходе объекта с базовой установки.
Если сход объекта 4, с базовой установки 5 прошел нормально (время схода не превысило допустимый временный показатель), прерыватель 13 размыкается, а устройство 3 начинает вырабатывать команды управления и передавать их на объект 4.
Команды управления вырабатываются по информации, поступающей из задатчика управления 1, и по индикации с аппаратуры 2 выделения координат объекта управления.
Задатчик управления 1 вырабатывает координаты конечной точки движения объекта управления 4. С первого выхода задатчика управления выдается значение угла места конечности точки, со второго выхода значение угла азимута конечной точки, с третьего выхода - значение дальности до конечной точки - с четвертого выхода может быть выдан запрет выполнения задачи. Конечная цель может изменять свои координаты в процессе управления. Аппаратура 2 выделения координат фиксирует через пространство (например, с использование электромагнитного излучения) положения объекта управления 4 и выдает координаты объекта в виде с первого выхода аппаратуры - текущее значение угла места объекта, сто второго выхода - текущее значение угла азимута объекта, с третьего выхода - дальность до объекта, с четвертого выхода - сигнал наличия визирования объекта в текущий момент времени.
Выработанные команды передаются на объект управления, далее поступают на привод объекта управления, что вызывает корректировку траектории движения объекта 4.
При появлении на четвертом выходе задатчика управления 1 сигнала запрета, он подается на третий вход первого элемента "ИЛИ" (14); последний вырабатывает сигнал сброса управления, который передается на пятый вход устройства выработки и передачи команд 3. По сигналу сброса устройство 3 в течение, например, 2 секунд вырабатывает команды управления по устранению объекта управления 4 с программной траектории. Одновременно сигнал запрета с устройства 1 подается на индикаторе 20 и сигнализирует человеку-оператору о причине сброса управления.
Сброс управления объектом вырабатывается также первым элементом "ИЛИ" (14) в следующих двух случаях.
Во-первых, когда срабатывает компаратор 10 при сравнении разности расстояний до объекта и до конечной точки с допустимой величиной разности. Разность расстояний получают с сумматора 9, допустимая величина разности (превышение дальности до объекта над дальностью до конечной точки) выдается задатчиком контроля 11. Дальнейшее управление объектом 4 после срабатывания компаратора 10 привело бы к удалению объекта от конечной точки. При этом сигнал с выхода компаратора 10 также подается на индикатор 21 для сигнализации о причине сброса управления.
Во-вторых, когда поступит сигнал с выхода прерывателя 13.
Объект управления 4 имеет привода коррекции траектории движения по углам места и азимута в соответствии с командами управления, скорость перемещения объекта, как правило, является нерегулируемой величиной, получает максимальное значение после начального импульса, а затем уменьшается в процессе движения объекта 4. Особенностью объекта 4 является возможность его визирования аппаратурой 2 лишь при сохранении работоспособности объекта 4.
После окончания текущего цикла функционирования автоматизированного комплекса готовится включение последующего цикла функционирования.
Вторым элементом "ИЛИ" (17) вырабатывается сигнал "Повторный пуск", который подается на индикатор 19, а при автоматическом режиме комплекса может быть использован для выработки сигнала "Пуск" последующего цикла.
Второй элемент "ИЛИ" (17) срабатывает в двух случаях. Во-первых, когда на выходе прерывателя 13 появляется сигнал о неудовлетворительном функционировании объекта 4 на базовой установке 5. И, во-вторых, при одновременном визировании нормально функционирующего объекта 4 аппаратурой выделения координат 2, наличии сигнала с выхода первого элемента "ИЛИ" (14) и наличии сигнала с выхода компаратора 10 т.е. при одновременном срабатывании первого элемента "И" (15) и второго элемента "ИЛИ" (16).
Линия задержки 18 обеспечивает синхронизацию процессов контроля и управления системы.
После отработки команд сброса управления базовая установка переключается на следующий объект управления 4, и система приводится в исходное состояние перед пуском.
Реализуемость системы управления и контроля вытекает из того, что ряд устройств входящих в систему, реализованы и работают в составе прототипа, а вновь вводимые элементы реализуются на основе серийно выпускаемых изделий со стандартными характеристиками. Эти элементы и устройства описаны также в следующих материалах.
Принципы построения и основные узды и характеристики задатчика управления 1 описаны, например, в книге Демидова В.П. и Кутыева Н.Ш. "Управление зенитными пакетами" - М., Воениздат, 1989, на стр. 85-174, 294-300. Основы построения и эксплуатации подобных объектов управления 4 даны в той же книге на стр. 40-41. Распространенные типы аппаратуры выделения координат 2 описаны в той же книге на стр. 175-195. Основы построения и функционирования устройств выработки и передачи команд 3 приведены в той же книге на стр. 234-282.
Основы построения базовой установки 5 с датчиком схода 6 приведены в табл. 6 на стр. 115 статьи Шехвица Э.И. "Системы управления и привода механизмов" периодических перемещений в машинах-автоматах" в книге "Теория машин автоматического действия и теория точности в машиностроении и приборостроении" - M., Машгиз, 1960. Там же на стр. 110 описано устройство системы автоматики.
Индикаторы 19-22 могут реализовываться, например, на светодиодах типа АЛ 307 с соответствующей схемой включения.
Таймер 12 выполняется на основе, например, микросхемы К1006ВИ1 (см. книгу "Микросхемы для бытовой радиоаппаратуры" Справочник И.В.Блудов, А.В. Юровский - М.: Радио и связь, 1989.).
Прерыватель 13 выполняется на основе, например, микросхемы КР162КТ1(см. стр. 414 книги "Интегральные микросхемы" Справочник// Под ред. Б.В.Тарабрина. - М.: Радио и связь. 1984).
Инвертор 8 может быть выполнен на основе микросхемы КР140УД1А, а сумматор 9 - на основе микросхемы К14ОУД8А (см. стр. 398-399 книги "Интегральные микросхемы"// Под ред. Б.В.Тарабрина - М.: Радио и связь, 1984).
Компаратор 10 выполняется, например, на основе микросхемы К554СА3 (см. стр. 362 книги "Цифровые и аналоговые интегральные микросхемы: Справочник // Под" ред. С.В.Якубовского - М.: Радио и связь, 1990). Задатчик 11 реализуется в виде делителя напряжения.
Элемента "ИЛИ" 14 и 17 реализуются, например, в виде микросхемы К555ЛЛ1 (см. стр. 48 книги "Цифровые и аналоговые интегральные микросхемы // Под ред. С.В.Якубовского - М.: Радио и связь, 1990), а элементы "И" 15 и 16 - в виде микросхемы К555ЛИ1 (см. стр. 47 той же книги).
Таким образом, предлагаемое техническое решение характеризуется новизной, практической реализуемостью и обеспечивает системе расширение функциональных возможностей по повышению быстродействия и по повышению эффективности управления и контроля, а также повышение быстродействия и эффективности автоматизированного комплекса в целом в циклическом режиме работы.
Изобретение относится к области управления и регулирования и, в частности к области контроля и управления автоматизированными комплексами с использованием электрических сигналов в роботизированных производствах. Технический результат заключается в повышении эффективности работы автоматизированного комплекса, который достигается за счет того, что в систему управления и контроля автоматизированного комплекса введены инвертор, сумматор, таймер, компаратор, задатчик контроля, прерыватель, два элемента ИЛИ, два элемента И, линия задержки и четыре индикатора. 1 ил.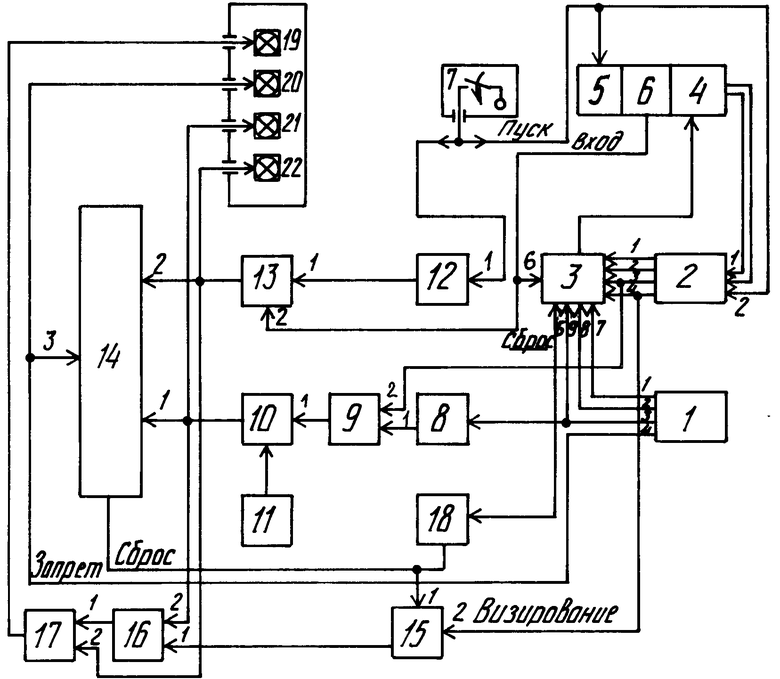
Система управления и контроля, содержащая задатчик управления, аппаратуру выделения координат объекта, устройство выработки и передачи команд и объект управления, а также базовую установку с датчиком схода и систему автоматики с ключом пуска, отличающаяся тем, что она снабжена инвертором, сумматором, таймером, компаратором, задатчиком контроля, прерывателем, двумя элементами ИЛИ, двумя элементами И, линией задержки и четырьмя индикаторами, причем первый вход аппаратуры выделения координат связан с объектом управления, первый, второй, третий и четвертый входы устройства выработки и передачи команд подключены к соответствующим выходам аппаратуры выделения координат, а седьмой, восьмой и девятый входы этого устройства - к первому, второму и третьему выходам задатчика управления, выход устройства выработки и передачи команд связан с объектом управления, выход ключа пуска подключен ко второму входу аппаратуры выделения координат, к базовой установке и к входу таймера, выход датчика схода подключен к шестому входу устройства выработки и передачи команд и к второму входу прерывателя, вход инвертора подключен к третьему выходу задатчика управления, а выход инвертора подключен к первому входу сумматора, выход которого подключен к первому входу компаратора, второй вход компаратора подключен к задатчику контроля, а выход компаратора - к первому входу первого элемента ИЛИ, второй вход сумматора подключен к третьему выходу аппаратуры выделения координат, выход таймера подключен к первому входу прерывателя, выход которого подключен к второму входу первого элемента ИЛИ, третий вход первого элемента ИЛИ подключен к четвертому выходу задатчика управления, первый вход первого элемента И соединен с выходом первого элемента ИЛИ, а его второй вход - с четвертым выходом аппаратуры выделения координат, выход первого элемента И соединен с первым входом второго элемента И, второй вход которого соединен с выходом компаратора, а выход второго элемента И - с первым входом второго элемента ИЛИ, второй вход которого подключен к выходу прерывателя, выход первого элемента ИЛИ через линию задержки соединен с пятым входом устройства выработки и передачи команд, выход второго элемента ИЛИ подключен к первому индикатору, четвертый выход задатчика управления - к второму индикатору, выход прерывателя - к четвертому индикатору, выход компаратора - к третьему индикатору.
| Справочник офицера противовоздушной обороны, /Под ред | |||
| Г.В.Зимина и С.К.Бурмистрова | |||
| - М.: Военное издательство, 1987, с | |||
| Орнито-геликоптер | 1919 |
|
SU442A1 |
