Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, например с носителями на земле, в которых применяются лучевые системы теленаведения.
Известны способ управления ракетой и система наведения ракеты для его осуществления [Патент РФ №2241950 от 10.12.2004 г. МПК7 F 41 G 7/24, F 42 В 15/01]. Способ управления ракетой заключается в том, что преобразуют электромагнитное излучение с пункта управления в электрические сигналы координат ракеты по курсу и тангажу, формируют команды управления ракетой по курсу и тангажу, причем команду управления по курсу формируют из электрического сигнала координаты по курсу, на ракете программно вырабатывают первую команду, пропорциональную величине провисания ракеты, вырабатывают вторую дополнительную команду, интегрируя электрический сигнал координаты по тангажу, а затем суммируют первую и вторую дополнительные команды и электрический сигнал координаты по тангажу и из суммарной величины формируют команду управления ракетой по тангажу.
Система наведения ракеты содержит аппаратуру пункта управления, а на ракете - последовательно включенные приемник и блок выделения координат, выход по курсу которого соединен с первым входом автопилота, при этом вход приемника связан с аппаратурой пункта управления, введены сумматор, блок компенсации, интегратор и блок включения интегратора, связанный с управляющим входом интегратора, сигнальный вход интегратора соединен с выходом блока выделения координат по тангажу, подключенного к первому входу сумматора, второй вход которого соединен с выходом интегратора, а третий - с блоком компенсации, при этом выход сумматора соединен со вторым входом автопилота.
В известном техническом решении (способ и система) повышена точность наведения за счет коррекции на борту ракеты величины команды управления в канале тангажа. Однако после встреливания ракеты в луч и полета низко над поверхностью и параллельно ей, например, при кратковременном прерывании линии связи возникает вероятность касания ракеты поверхности и ее подрыва, что снижает эффективность.
Таким образом, недостатком известного способа управления ракетой и системы наведения ракеты, его реализующей, является низкая эффективность из-за возможности падения ракеты.
Задачей предлагаемой группы изобретений (способа и системы) является повышение эффективности за счет исключения на ракете в канале тангажа команды управления, направленной вниз (к поверхности), а значит, и падения ракеты.
Поставленная задача решается за счет того, что в способе управления ракетой, включающем на этапе наведения ракеты по тангажу формирование сигнала управления суммированием сигнала координаты ракеты по тангажу, программной команды, пропорциональной величине провисания ракеты, и интегрированной величины сигнала координаты по тангажу, а затем сигналом управления формируют команду управления ракетой, односторонне ограничивают сигнал управления, исключая из него значения величин, соответствующих направлению сигнала управления вниз, при этом с момента старта ракеты измеряют время и вырабатывают в заданный момент времени импульсный сигнал, который задает формирование команды управления по тангажу вначале сигналом управления, а затем до конца полета ограниченным сигналом управления.
Система наведения ракеты, основанная на этом способе, содержит аппаратуру пункта управления, а на ракете - автопилот и последовательно соединенные приемник, блок выделения координат и сумматор, второй вход сумматора соединен с выходом интегратора со схемой включения, вход которого подключен к выходу блока выделения координат, третий вход сумматора соединен с выходом блока компенсации, при этом вход приемника связан с аппаратурой пункта управления, введены таймер и переключаемый ограничитель, при этом выход таймера соединен с первым входом переключаемого ограничителя, второй вход которого подключен к выходу сумматора, а выход переключаемого ограничителя соединен со входом автопилота по тангажу.
Поскольку признаки, связанные с каналом курса "Z", не выражают сущность и не влияют на достижение заявленного технического результата, то они отсутствуют в заявленном техническом решении.
Заявленный способ реализуется следующим образом. На этапе наведения (сближения ракеты с целью) по тангажу формируют сигнал управления суммированием сигнала координаты ракеты (соответствующий отклонению ее по тангажу от линии, связывающей аппаратуру пункта управления и цель, вдоль которой происходит наведение) программной команды, пропорциональной величине провисания ракеты, и интегрированной величины сигнала координаты. Сигналом управления формируют команду управления ракетой.
Сигнал управления односторонне ограничивают нулевым уровнем, при этом его величина будет изменяться относительно нулевого уровня в одну сторону, что исключает направление команды управления вниз (в сторону поверхности), а значит, в процессе наведения ракеты на цель уменьшается величина амплитуды колебаний ракеты вниз и время нахождения ее ниже линии (плоскости), имеющей нулевые значения координат (по тангажу).
На ракете с момента старта измеряют текущее время и вырабатывают в заданный момент времени (например, после начала работы интегратора) импульсный сигнал. Этот сигнал задает формирование команды управления по тангажу вначале сигналом управления, а затем до конца полета ограниченным сигналом управления.
Предлагаемое изобретение поясняется чертежами, приведенными на фиг.1, 2 и 3. На фиг.1 приведена структурная электрическая схема системы наведения ракеты, где 1 - аппаратура пункта управления (АПУ), 2 - ракета (Р), 3 - приемник (П), 4 - интегратор со схемой включения (ИН), 5 - блок выделения координат (БВК), 6 - сумматор (С), 7 - блок компенсации (БК), 8 - таймер (Т), 9 - переключаемый ограничитель (ПО), 10 - автопилот (А).
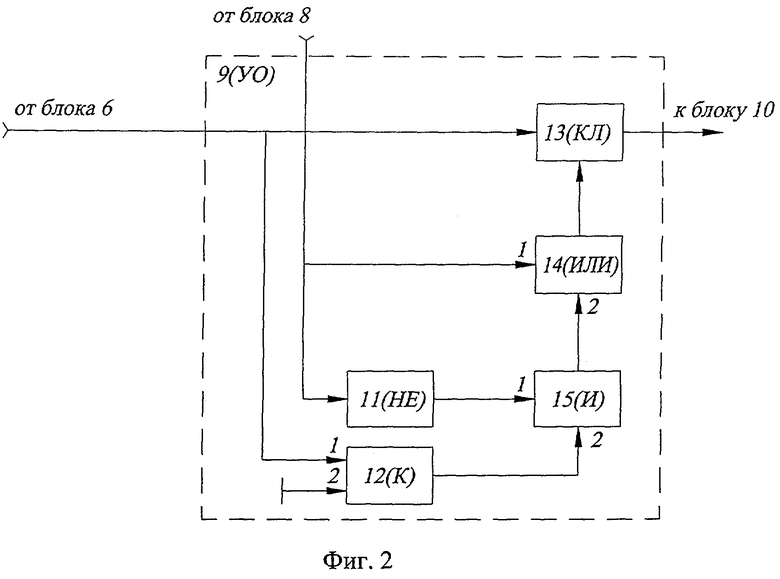
На фиг.2 приведена структурная электрическая схема переключаемого ограничителя 9 (пример выполнения), где 11 - логическая схема НЕ (НЕ), 12 - компаратор (К), 13 - электронный ключ (КЛ), 14 - логическая схема ИЛИ (ИЛИ), 15 - логическая схема И (И).
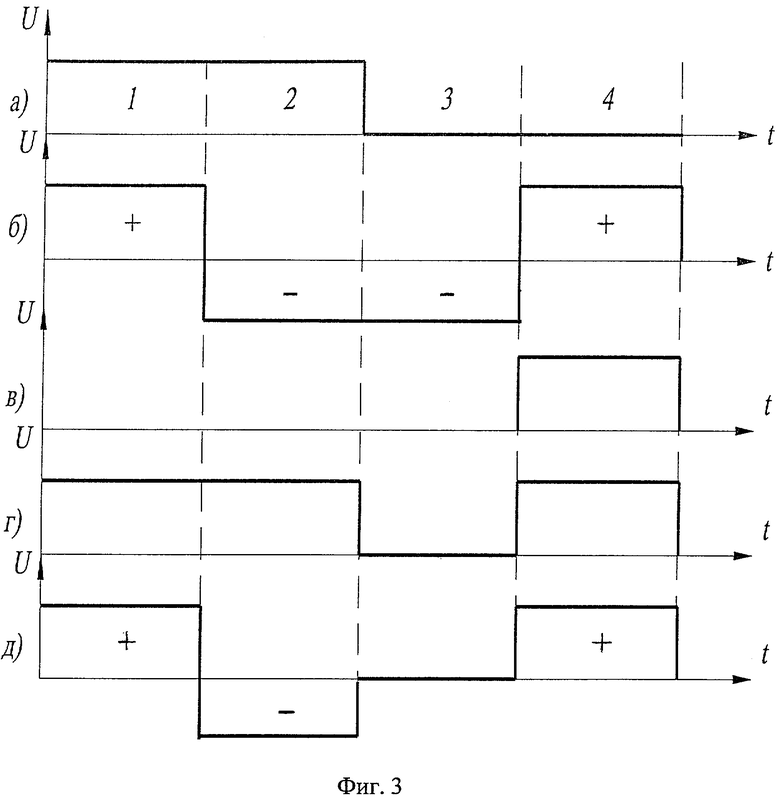
На фиг.3 представлены эпюры сигналов, где "а" - сигнал на выходе таймера 8, "б" - полярность (знак) сигнала на выходе сумматора 6, "в" - сигнал на выходе логической схемы И 15, "г" - сигнал на выходе логической схемы ИЛИ 14, "д" - полярность (знак) сигнала на выходе электронного ключа 13.
Система управления ракетой содержит на ракете 2 последовательно соединенные приемник 3, блок выделения координат 5 и сумматор 6. Второй вход сумматора 6 соединен с выходом интегратора со схемой включения 4, вход которого подключен к выходу блока выделения координат 5. Третий вход сумматора 6 соединен с выходом блока компенсации 7. Вход приемника 3 связан (после ввода ракеты в луч электромагнитным излучением) с аппаратурой пункта управления 1. Выход таймера 8 соединен с первым входом переключаемого ограничителя 9, второй вход которого соединен с выходом сумматора 6. Выход переключаемого ограничителя соединен со входом автопилота 10 по тангажу.
Аппаратура пункта управления 1, приемник 3, интегратор со схемой (блоком) включения 4, блок выделения координат 5, сумматор 6, блок компенсации 7 и автопилот 9 могут быть выполнены, как в известной системе управления ракетой.
Таймер 8 можно выполнить, например, как реле времени [У.Титце, К.Шенк "Полупроводниковая схемотехника", М.: Мир, 1983 г., стр.313, 314, рис.18.36, 18.37], при этом входным сигналам может быть импульсный сигнал, подаваемый на запуск двигательной установки, а длительность сформированного таймером импульса должна превышать максимальное время полета ракеты. Пример выполнения переключаемого ограничителя 9 приведен на фиг.2. Логические схемы НЕ 11, ИЛИ 14 и И 15, например соответствующие микросхемы серии 564. Компаратор 12, например микросхема 521САЗ. Электронный ключ 13 можно выполнить на мультиплексоре, например на микросхеме 564КП1.
Заявленная система наведения ракеты работает следующим образом. Аппаратура пункта управления 1, расположенная, например, на земле, формирует поле управления, например по закону времяимпульсной модуляции по курсу "Z" и тангажу "У". В момент старта ракеты 2 запускается таймер 8, который измеряет текущее время полета. С момента старта ракеты 2 и до момента попадания ее в поле управления на выходе по тангажу "У" блока выделения координат 5 будет нулевое значение координаты (величина напряжения ей соответствующая), при этом на вход по тангажу автопилота 10 поступает через переключаемый ограничитель 9 команда в виде напряжения только с блока компенсации 7 через сумматор 6. Эта команда компенсирует вес ракеты.
В момент попадания ракеты 2 в поле управления приемник 3 преобразует электромагнитное излучение в электрические импульсы, которые поступают на вход блока выделения координат 5. Этот блок выделяет координату по тангажу (ее электрический сигнал), который поступает на первый вход сумматора 6 и вход интегратора со схемой включения 4. В сумматоре 6 координата со своим знаком суммируется с командой с выхода блока компенсации 8, что облегчает встреливание ракеты в луч, и поступает на вход автопилота 9 по тангажу.
По окончании переходного процесса встреливания ракеты в луч (в поле управления) включают интегратор его схемой включения 4, который интегрирует величину координаты по тангажу, выделяя величину ошибки, т.е. величину отклонения от точки прицеливания и подает ее на второй вход сумматора 6. Таким образом, на выходе сумматора 6 до конца полета формируется по тангажу суммарная команда.
Сигнал с единичным логическим уровнем с выхода таймера 8 поступает на первый вход логической схемы ИЛИ 14 и независимо от логического уровня на ее втором входе на выходе схемы 14 сформируется единичный логический уровень (эпюра "г" на фиг.3), который разрешит электронному ключу 13 пропустить с выхода сумматора 6 на вход автопилота 10 команду (сигнал) любого знака (участки 1 и 2 эпюры "б" на фиг.3).
С момента появления на выходе таймера 8 сигнала с нулевым логическим уровнем (эпюра "а" на фиг.3) он проинвертируется логической схемой НЕ 11 и на первом входе логической схемы И 15 будет единичный логический уровень.
Сигнал с выхода сумматора 6 поступает на первый вход компаратора 12, на втором входе которого нулевой логический уровень. При отрицательной величине команды (участок 3 эпюры "б" на фиг.3) на выходе компаратора 12 нулевой логический уровень, который поступает на второй вход логической схемы И 15 и устанавливает на ее выходе также нулевой логический нуль (эпюра "в" на фиг.3).
Таким образом, на первом и втором входах логической схемы ИЛИ нулевые логические уровни, которые выставят также нулевой логический уровень на ее выходе (эпюра "г" на фиг.3), запрещающий электронному ключу 13 пропустить с выхода сумматора 6 отрицательное значение команды (участок 3 эпюры "б" на фиг.3).
При наличии положительного значения команды (участок 4 эпюры "б" на фиг.3) на выходе компаратора 12 будет единичный логический уровень. Этот уровень поступит на второй вход логической схемы И 15. Поскольку на первом входе этой схемы также единичный логический уровень, то на ее выходе, а значит, втором входе логической схемы ИЛИ 14 будет единичный логический уровень (эпюра "в" на фиг.3), который выставит на выходе схемы 14 также единичный логический уровень (эпюра "г" на фиг.3), разрешающий прохождение положительного значения команды с выхода сумматора 5 (участок 4 эпюры "б" на фиг.3).
Таким образом, при наличии единичного логического уровня в сигнале на выходе таймера 8 (эпюра "а" на фиг.3) на вход автопилота по тангажу поступает как положительные, так и отрицательные команды с любыми значениями величин, а при наличии нулевого логического уровня - только положительные команды также с любыми значениями величин.
Срабатывание таймера 9 (момент начала формирования импульса с нулевым логическим уровнем) производят, например, после начала работы интегратора по истечении времени, соизмеримого с его постоянной времени, когда интегратор при нарушении линии связи может "лечь на нижний упор".
Следовательно, использование способа управления ракетой и системы наведения ракеты для его осуществления за счет того, что исключается падение ракеты, повышает эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2005 |
|
RU2289086C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СПОСОБ ВВОДА В ЗОНУ УПРАВЛЕНИЯ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТНЫЙ КОМПЛЕКС | 2007 |
|
RU2362107C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2291384C1 |
| СПОСОБ ВВОДА РАКЕТЫ В ЗОНУ ЛУЧА И КОМПЛЕКС ТЕЛЕУПРАВЛЯЕМОЙ В ЛУЧЕ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257522C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2004 |
|
RU2280233C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241951C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА | 2004 |
|
RU2280226C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257523C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, РАКЕТА, ВРАЩАЮЩАЯСЯ ПО УГЛУ КРЕНА, СПОСОБ ФОРМИРОВАНИЯ ДВУХСКАТНОГО ЛИНЕАРИЗИРОВАННОГО СИГНАЛА И ПЕРЕКЛЮЧАЕМЫЙ ЛИНЕАРИЗАТОР СИГНАЛА | 2005 |
|
RU2283466C1 |
Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, например с носителями на земле, в которых применяются лучевые системы теленаведения. Предложен способ управления ракетой, в котором односторонне ограничивают сигнал управления, исключая из него значения величин, соответствующих направлению сигнала управления вниз, при этом с момента старта ракеты измеряют текущее время и вырабатывают в заданный момент времени импульсный сигнал, который задает формирование команды управления по тангажу вначале сигналом управления, а затем до конца полета ограниченным сигналом управления. Предложена система наведения ракеты, в которую введены таймер и переключаемый ограничитель, при этом выход таймера соединен с первым входом переключаемого ограничителя, второй вход которого подключен к выходу сумматора, а выход переключаемого ограничителя соединен со входом автопилота по тангажу, что повысило эффективность. Техническим результатом является повышение эффективности за счет исключения падения ракеты. 2 н.п. ф-лы, 3 ил.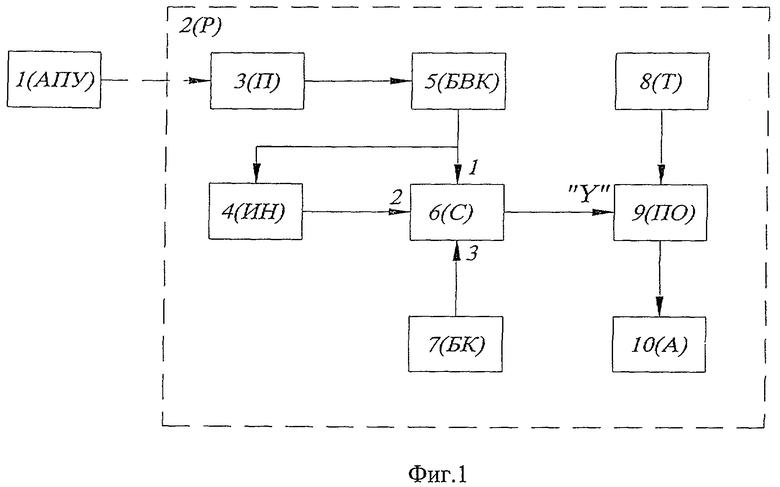
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

