Изобретение относится к транспортному машиностроению, в частности к движителям транспортных средств, конкретно - к шагающим колесам.
Известно шагающее колесо (немецкий патент №730607 от 14.01.1943 г.), содержащее ступицу с опорами, установленную на подвижной оси кривошипа, неподвижная ось которого установлена на несущем шагающее колесо звене конструкции транспортного средства. При этом для каждой опоры на ступице установлен радиально размещенный отрезок направляющей, предназначенной для взаимодействия с опорным роликом, неподвижно установленным на звене, и ролик для взаимодействия, в цикле вращения кривошипа, с криволинейными отрезками направляющих расположенных на звене.
Недостатком указанного шагающего колеса является сложность конструкции ввиду присутствия многих направляющих и роликов на ступице, ролика и отрезка направляющих, размещенных на звене, приводящих в цикле вращения кривошипа к повороту ступицы с опорами по принципу действия мальтийского креста, соответственно обеспечивающие прерывистое вращение ступицы, что приводит к снижению надежности работы шагающего движителя.
Цель изобретения - упрощение конструкции шагающего колеса и повышение надежности его работы.
Указанная цель достигается тем, что шагающее колесо, содержащее ступицу с опорами, размещенными по ее периметру и содержащее систему направляющих и взаимодействующих с ними роликов, для реализации поворота ступицы вокруг ее центра в процессе выполнения шагового движения опорами колеса, которая осуществлена:
1) либо посредством снабжения ступицы замкнутой направляющей, взаимодействующей с ней опорным роликом, установленным на несущем шагающее колесо звене конструкции транспортного средства, а звена - прямой направляющей и выполнением поворотной связи ступицы с подвижным элементом (блоком, ползуном, роликом), размещенным в прямой направляющей звена;
2) либо посредством снабжения ступицы двумя замкнутыми направляющими, каждая из которых взаимодействует со своим опорным роликом, размещенными на несущем шагающее колесо звене конструкции транспортного средства, а звена - прямой направляющей, и выполнением поворотной связи ступицы с подвижным элементом (блоком, ползуном, роликом), размещенным в прямой направляющей звена, причем один опорный ролик установлен вверху от прямой направляющей звена для взаимодействия с первой замкнутой направляющей, другой - внизу для взаимодействия со второй замкнутой направляющей;
3) либо опоры на ступице установлены на шарнирах, и каждая опора снабжена двумя дополнительными шарнирами, которые размещены в разных противоположных сторонах от шарнира ступицы, несущей опору, причем каждая опора связана с соседней опорой посредством дополнительного звена, установленного на разноименных дополнительных шарнирах опор;
4) либо посредством поворотной установки ступицы на неподвижной на блоке (элементе) оси, на блоке (элементе), подвижно взаимодействующем с прямой направляющей звена, несущего шагающее колесо в конструкции транспортного средства. Причем каждая опора снабжена дополнительным шарниром, размещенным на удалении от шарнира ступицы и связанным посредством дополнительного звена с шарниром подвижного блока (элемента), находящимся на расстоянии от, (центра вращения ступицы), неподвижной оси блока (элемента), равному длине расстояния между шарнирами опоры, при этом пространственные прямые, соединяющие шарниры опор ступицы, то есть опоры, находящейся в контакте с грунтом, параллельны прямой, соединяющей шарнир блока и центр (вращения ступицы) неподвижной оси блока (элемента).
В целях получения более надежной конструкции связи шагающего колеса с транспортным средством подвижный элемент (блок), размещенный в прямой направляющей звена, может быть выполнен с использованием нескольких роликов и ползуна, то есть в виде блока.
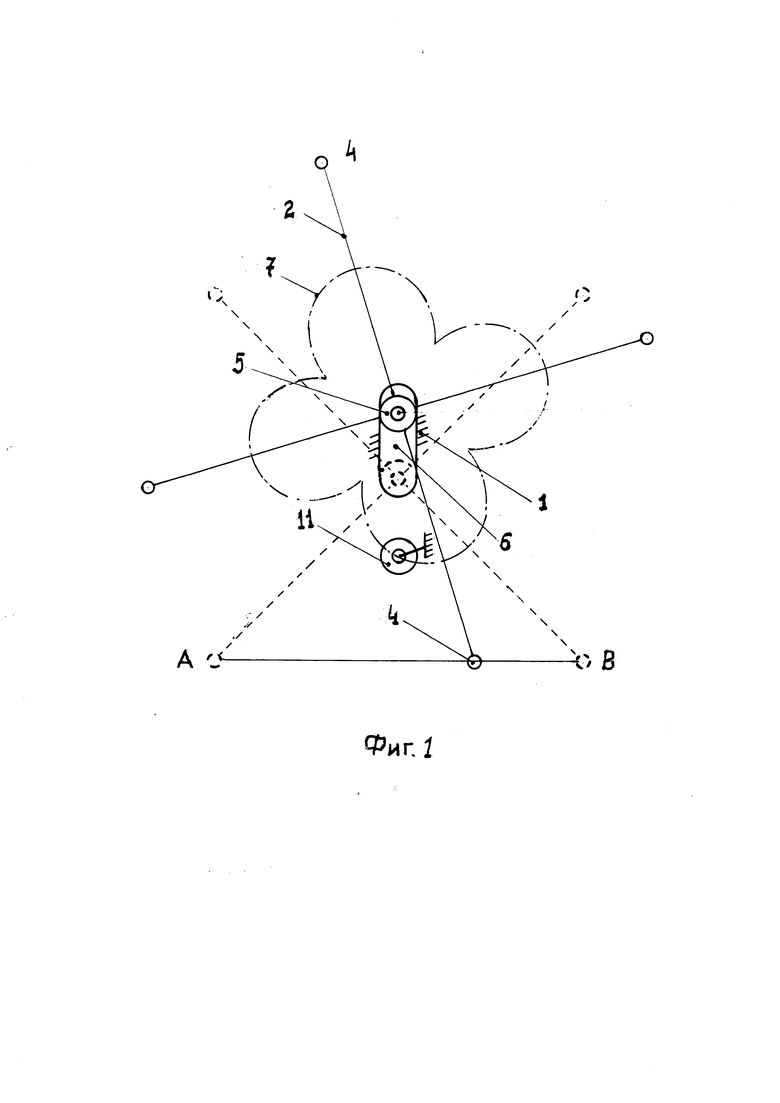
На фиг. 1 приведена кинематическая схема и центровой профиль замкнутой направляющей ступицы шагающего колеса варианта 1, при размещении опорного ролика внизу прямой направляющей звена, несущей шагающее колесо, конструкции транспортного средства.
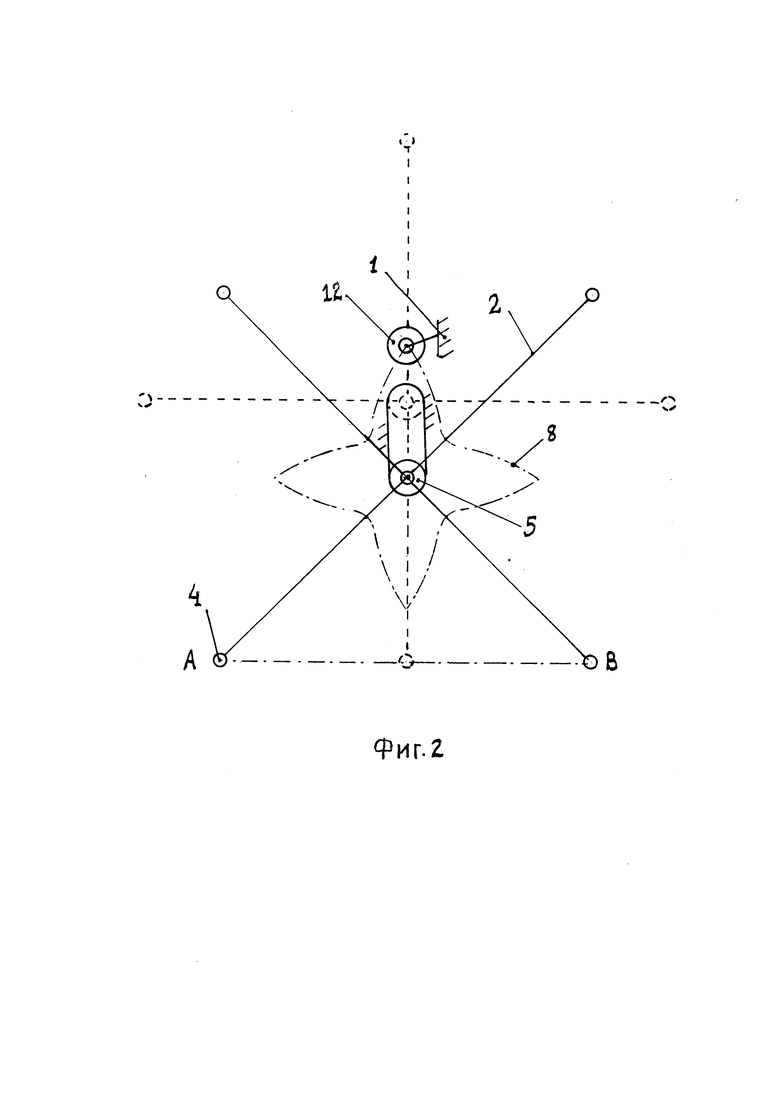
На фиг. 2 - кинематическая схема и центровой профиль замкнутой направляющей ступицы шагающего колеса варианта 1 при размещении опорного ролика вверху прямой направляющей звена, несущей шагающее колесо, конструкции транспортного средства.
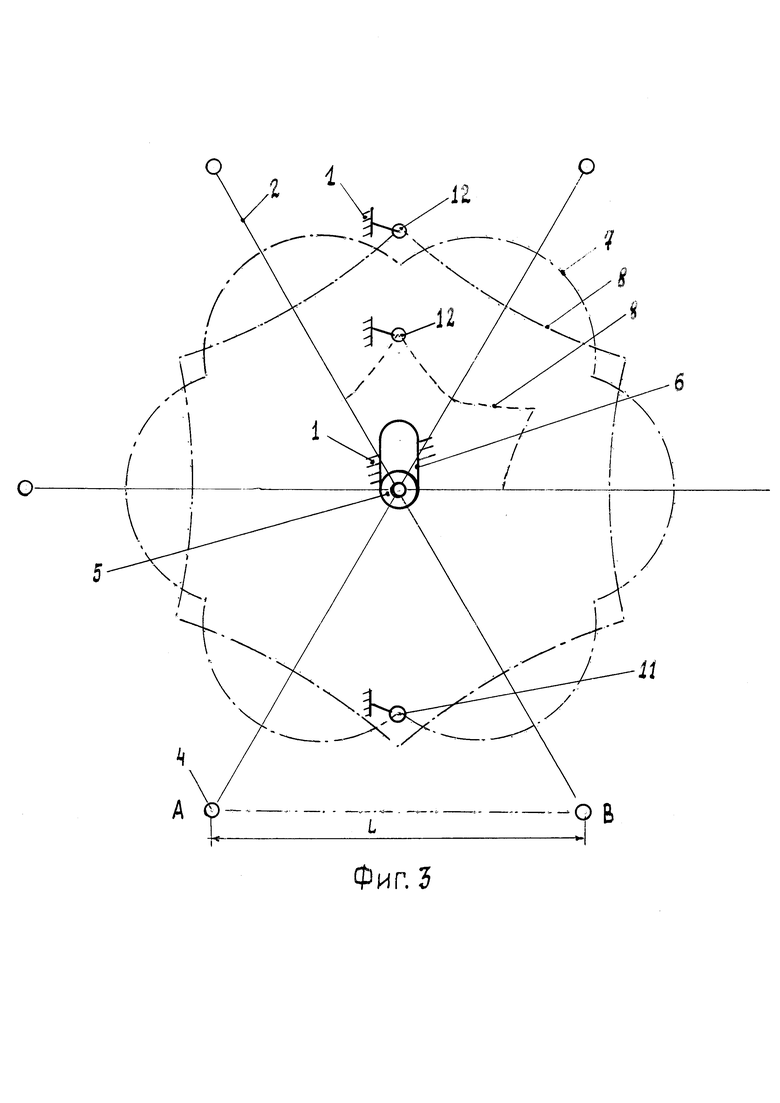
На фиг. 3 - кинематическая схема варианта 1 для шагающего колеса с шестью опорами и центровой профиль замкнутой направляющей ступицы для каждого опорного ролика, установленных над и под прямой направляющей звена, несущего шагающее колесо, конструкции транспортного средства.
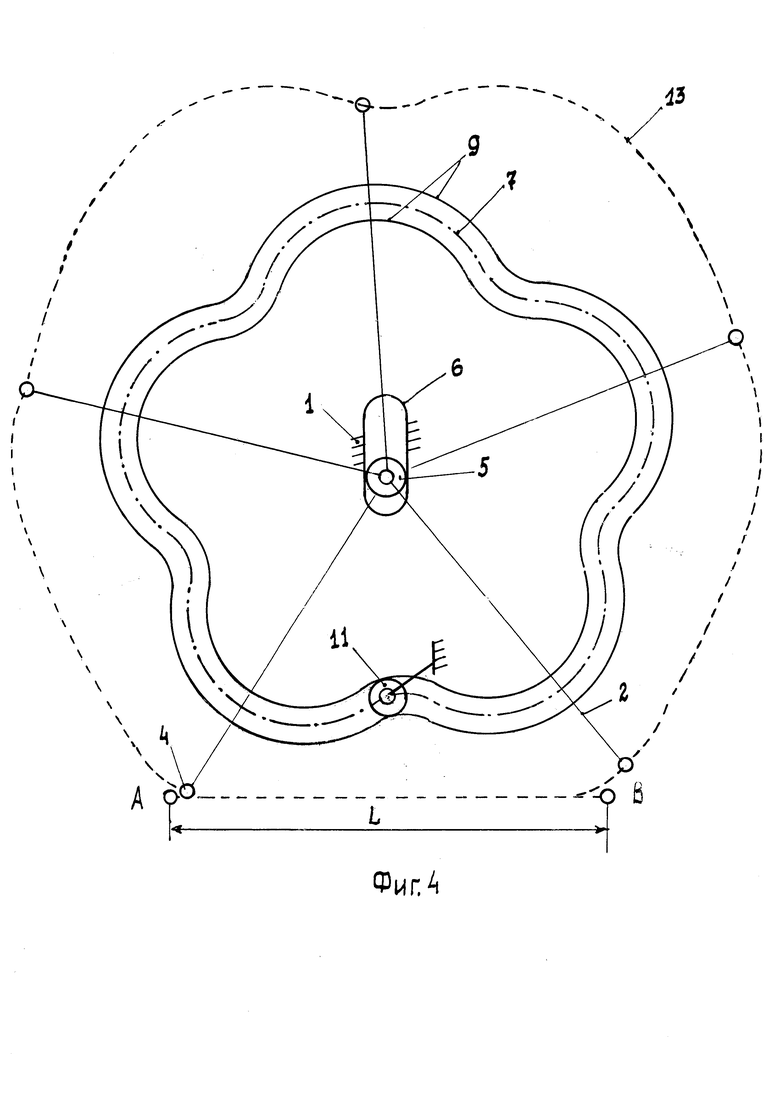
На фиг. 4 - кинематическая схема варианта 1 для колеса с пятью опорами со скорректированным профилем замкнутой направляющей ступицы и траектория движения шарнира выходного звена, которая на концах участка А-В, контакта опоры с поверхностью, отличается.
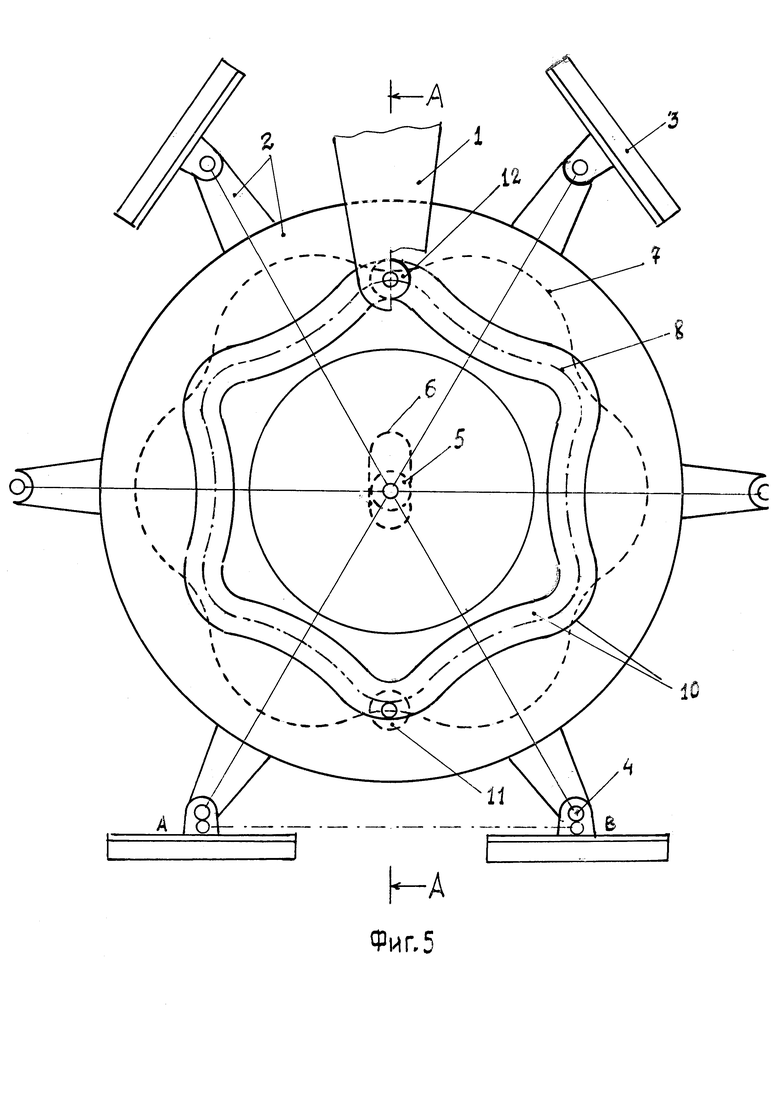
На фиг. 5 - конструкция шагающего колеса варианта 2 со скорректированными профилями замкнутых направляющих ступицы.
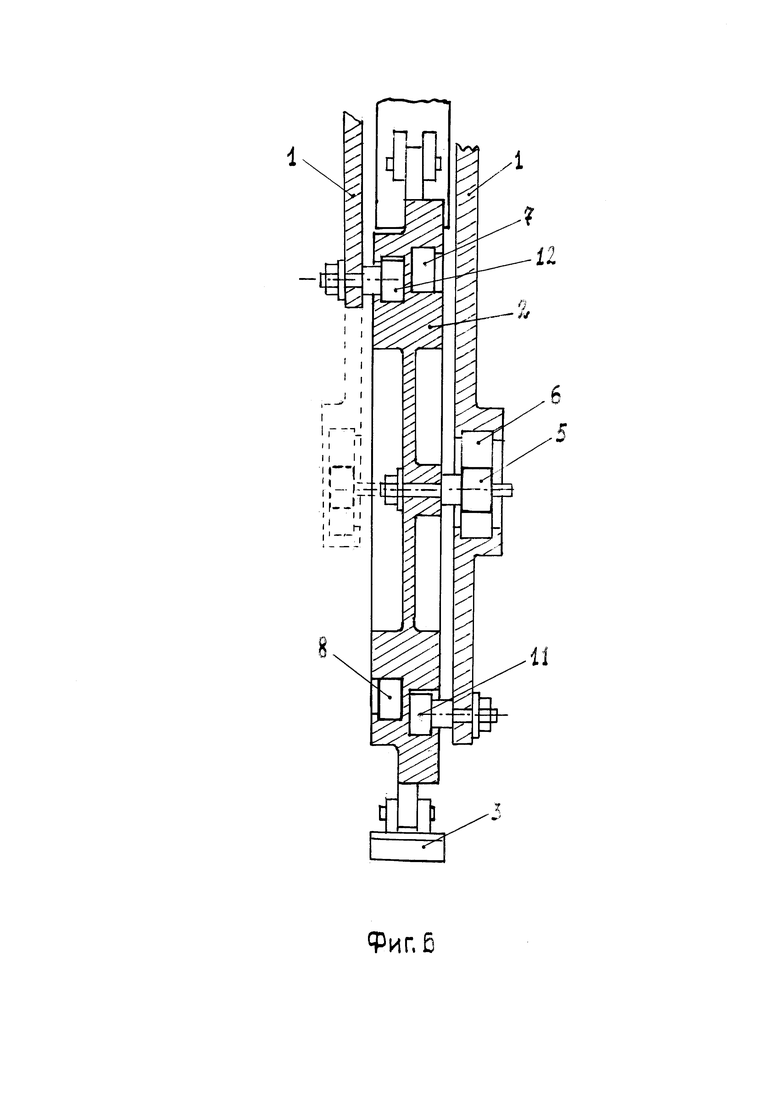
На фиг. 6 - вид А-А фиг. 5, где с пунктирной линией указана возможная конструкция связи оси ступицы с вторым подвижным элементом, размещенным во второй прямой направляющей звена, несущего шагающее колесо конструкции транспортного средства.
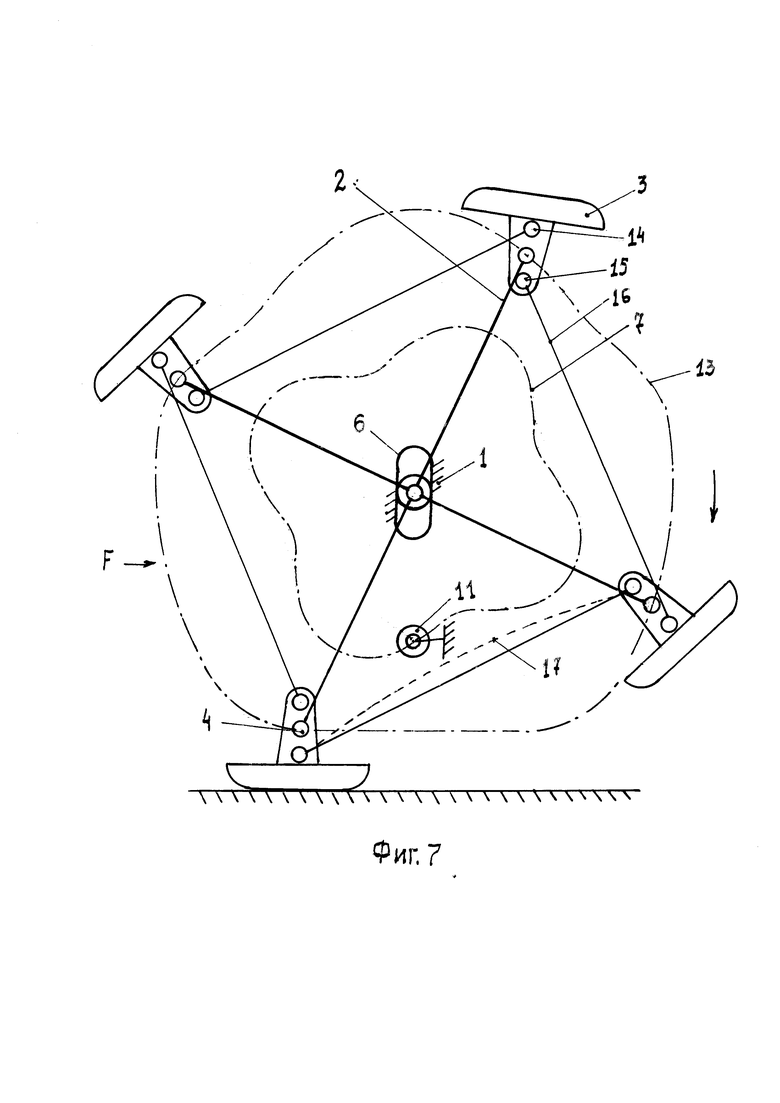
На фиг. 7 приведена кинематическая схема варианта 3 для шагающего колеса с четырьмя опорами и вид скорректированной на участке АВ (не указ.) траектории перемещения шарнира выходного звена и центрового профиля ступицы для опорного ролика размещенного ниже прямой направляющей звена, звена несущего шагающее колесо в конструкции транспортного средства.
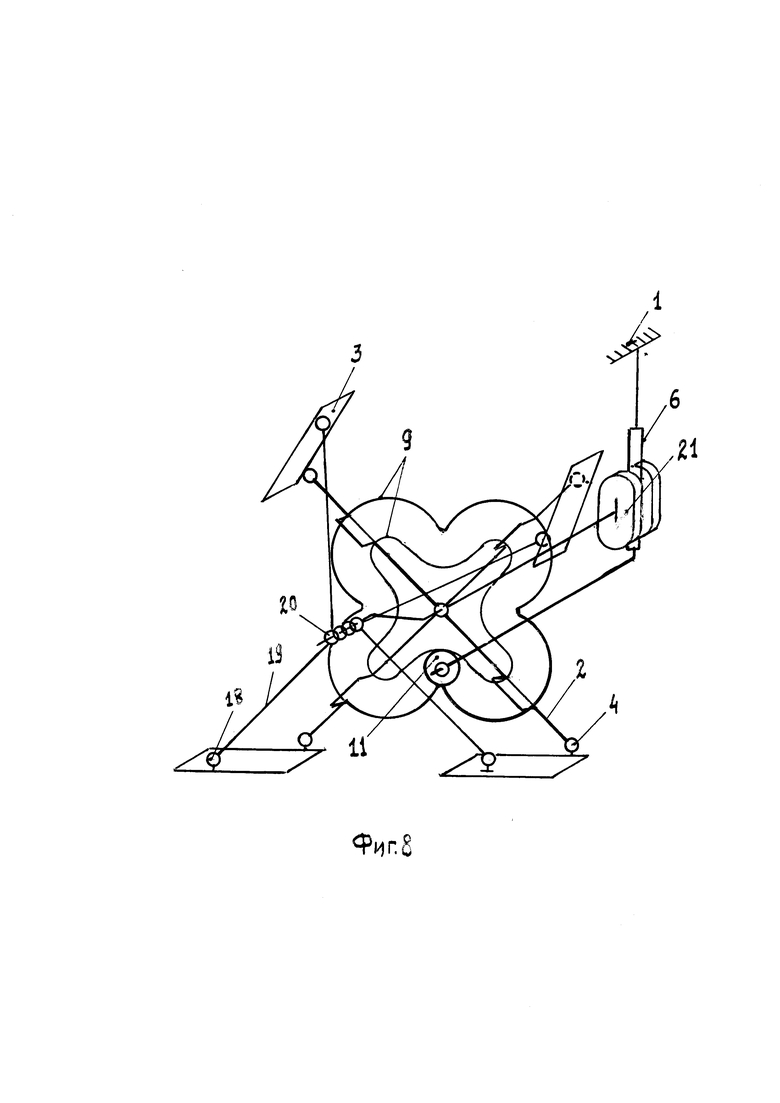
На фиг. 8 приведена кинематическая схема шагающего колеса варианта 4.
Шагающее колесо варианта 2 (фиг. 5 и 6) содержит, несущее шагающее колесо, звено 1 конструкции транспортного средства (не указ.), ступицу 2 с опорами 3, каждая из которых установлена на шарнире 4 выходного звена ступицы. В центре ступицы установлена ось, несущая ролик (элемент, блок) 5, взаимодействующий с прямой направляющей 6, размещенной на несущем шагающее колесо звене 1 конструкции транспортного средства. Сама ступица 2 содержит две отдельные замкнутые направляющие (на фиг. 1, 3-7 приведены центральный профиль 7 замкнутой направляющей 9 ступицы 2, а на фиг. 2, 3 и 5 - центральный профиль 8 замкнутой направляющей 10), одна (на фиг. 4) 9 - для взаимодействия с опорным роликом 11, размещенным ниже прямой направляющей 6 звена 1, другая (на фиг. 5 и 6) 10 - для взаимодействия опорным роликом 12, размещенном выше прямой направляющей 6 звена 1. Сама конструкция шагающего колеса варианта 2 приведена на фиг. 5 и 6.
Шагающее колесо варианта 1 (фиг. 1 и 4) содержит, несущее шагающее колесо, звено 1 конструкции транспортного средства (не указ.), ступицу 2 с опорами 3, каждая из которых установлена на шарнире 4 (траектория 13 движения шарнира 4) выходного звена ступицы 2. Ступица 2 содержит замкнутую направляющую 9 с которой взаимодействует опорный ролик 11, размещенный внизу от прямой направляющей 6 на звене 1, несущем шагающее колесо в конструкции транспортного средства. В центре ступицы 2 установлена ось, несущий ролик (ползун, элемент) 5 для взаимодействия с прямой направляющей 6, находящейся на звене 1. На фиг. 2 приведена кинематическая схема шагающего колеса варианта 1 и центральный профиль 8 замкнутой направляющей ступицы 2 и взаимодействующий с ней опорный ролик 12, размещенный в верхней части от прямой направляющей 6, находящейся на звене 1, несущем шагающее колесо конструкции транспортного средства.
На фиг. 4 приведена скорректированная замкнутая направляющая 9 ступицы 2 и траектория 13 движения шарнира 4 выходного звена ступицы при размещении опорного ролика 11 внизу прямой направляющей 6 звена 1.
Шагающее колесо варианта 3 (фиг. 7) содержит конструкции вариантов 1 и 2, в отличии от которых обязательным является, чтобы опоры 3 на ступице 2 были бы установлены шарнирно и каждая снабжена двумя дополнительными шарнирами 14 и 15, размещенными в разных противоположных сторонах от шарнира 4 несущей опору, причем каждая опора связана с соседней опорой посредством дополнительного звена 16, установленного на разноименных шарнирах опор.
Связь шарниров 14 и 15 так же можно выполнить посредством упругой связи. Упругость связи можно осуществить, например, выполнив упругим дополнительное звено 16 в виде дуги 17 или разместив шарниры 14 и 15 на опоре в упругом кольце, что позволяет работать колесу от жесткого взаимодействия опор между собой при движении транспорта по грунту с многими неровностями.
Шагающее колесо варианта 4 (фиг. 8) содержит конструкции вариантов 1 и 2, в отличии от которых также обязательным является то, чтобы опоры на ступице были установлены шарнирно. При этом каждая опора 3 снабжена дополнительным шарниром 18, размещенным на удалении от шарнира 4 и связанным посредством дополнительного звена 19 с шарниром 20 подвижного блока (элемента) 21. Длина дополнительного звена 19 выбрана равной длине расстояния между центром ступицы 2 и шарниром 4 опоры 3. Расстояние между шарниром 20 и центром (вращения ступицы) неподвижной оси блока 21 выбрано равным длине расстояния между шарнирами 4 и 18 опоры 3, а местоположение шарнира 20 выбрано так, чтобы пространственные прямые, соединяющие шарнир 20 и центр неподвижной оси блока 21 были параллельны прямой, соединяющей шарниры 4 и 18 опоры, находящейся в контакте с грунтом.
Шагающее колесо варианта 1 и 2 в режиме ведомого колеса работает следующим образом.
При приложении толкающего усилия от корпуса транспортного средства опора 3, находящаяся в контакте с грунтом, оставаясь неподвижным относительно грунта, приводит к повороту ступицу 2. Кроме того, ввиду взаимодействия замкнутой направляющей 9 ступицы 2 с опорным роликом 11 или 10 и 12, а в варианте 2 (фиг. 5 и 6) совместные взаимодействия замкнутых направляющих 9 и 10, каждая со своим опорным роликом 11 и 12, и ролика (элемента, блока) 5 ступицы 2 с прямой направляющей 6 звена 1, несущего шагающее колесо в конструкции транспортного средства, приводит к перемещению ступицы в вертикальной плоскости. При этом ступица 2, совершая поворот, опускает опору 3 на грунт, перемещая транспортное средство горизонтально на длину шага шагающего колеса без заметных вертикальных колебаний.
Данное колесо может работать и в режиме ведущего. Для этого к оси ролика 5 (фиг. 6) необходимо передавать крутящий момент от привода транспортного средства через механизм универсального шарнира.
Шагающее колесо варианта 3 работает следующим образом.
При приложении толкающего усилия F от корпуса транспортного средства от суммарных взаимодействий направляющих и опорных роликов шагающего колеса ступица поворачивается. При этом опора, находящаяся в контакте с грунтом, через свой шарнир 14, дополнительное звено 16 и шарнир 15 опускающейся опоры 3, поворачивает ее в направлении вращения ступицы, то есть по мере опускания этой опоры к грунту ориентирует плоскость опоры к плоскости грунта, подготавливая опору к контакту с грунтом. Один из моментов этого процесса изображен на фиг. 7.
Шагающее колесо варианта 4 работает следующим образом.
При приложении толкающего усилия от корпуса транспортного средства, от суммарных взаимодействий направляющих и опорных роликов шагающего колеса, ступица поворачивается. Поскольку шарниры контактирующей с грунтом опоры расположены на прямой параллельной к поверхности грунта, а звенья, соединяющие шарниры опор и подвижного блока составляют шарнирный параллелограмм, то плоскость следующей контактирующей с грунтом опоры так же ориентируется к плоскости грунта.
Таким образом, такие технические решения при любой скорости вращения шагающего колеса позволяют подготовить следующую опору к контакту с грунтом и стабильно устойчиво удерживать опоры в процессе вращения шагающего колеса.
Приведенные для иллюстрации конструкции шагающего колеса на основе приведенных технических решений не исчерпывают возможность реализации их и в другом конструктивном исполнении.
В целях получения более точных очертаний центрового профиля замкнутых направляющих ступицы, автор выполнил их в увеличенном масштабе, особенно при определении скорректированного профиля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающее колесо | 2021 |
|
RU2763325C1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| МЕХАНИЗМ (ВАРИАНТЫ) | 1996 |
|
RU2121093C1 |
| Механизм шагающего движителя | 2019 |
|
RU2723923C1 |
| Колесо транспортного средства | 1989 |
|
SU1785915A1 |
| МЕХАНИЗМ | 1992 |
|
RU2054593C1 |
| Шагающее колесо | 2020 |
|
RU2730118C1 |
| Шагающее колесо транспортного средства | 1989 |
|
SU1660997A1 |
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1991 |
|
RU2006725C1 |
| Шагающее колесо транспортного средства | 1987 |
|
SU1579796A1 |
Группа изобретений относится к шагающим движителям. Шагающее колесо содержит ступицу с опорами по ее периметру. Согласно первому варианту ступица снабжена замкнутой направляющей, взаимодействующей с опорным роликом, установленным на звене, несущем шагающее колесо. Центр ступицы поворотно связан с подвижным элементом, установленным в прямой направляющей звена. Во втором варианте ступица с опорами снабжена двумя замкнутыми направляющими, с каждой из которых взаимодействуют свои опорные ролики, установленные на звене. В третьем варианте шарниры размещены в разных противоположных сторонах от шарнира ступицы и каждые опоры связаны посредством дополнительного звена с разноименными шарнирами соседних опор. В четвертом варианте ступица установлена поворотно на неподвижной оси подвижного блока, взаимодействующего с прямой направляющей звена, несущего шагающее колесо. Каждая опора снабжена дополнительным шарниром, размещенным на удалении от шарнира ступицы и связанным посредством дополнительного звена с шарниром подвижного блока. Достигается повышение надежности работы шагающего колеса. 4 н.п. ф-лы, 8 ил.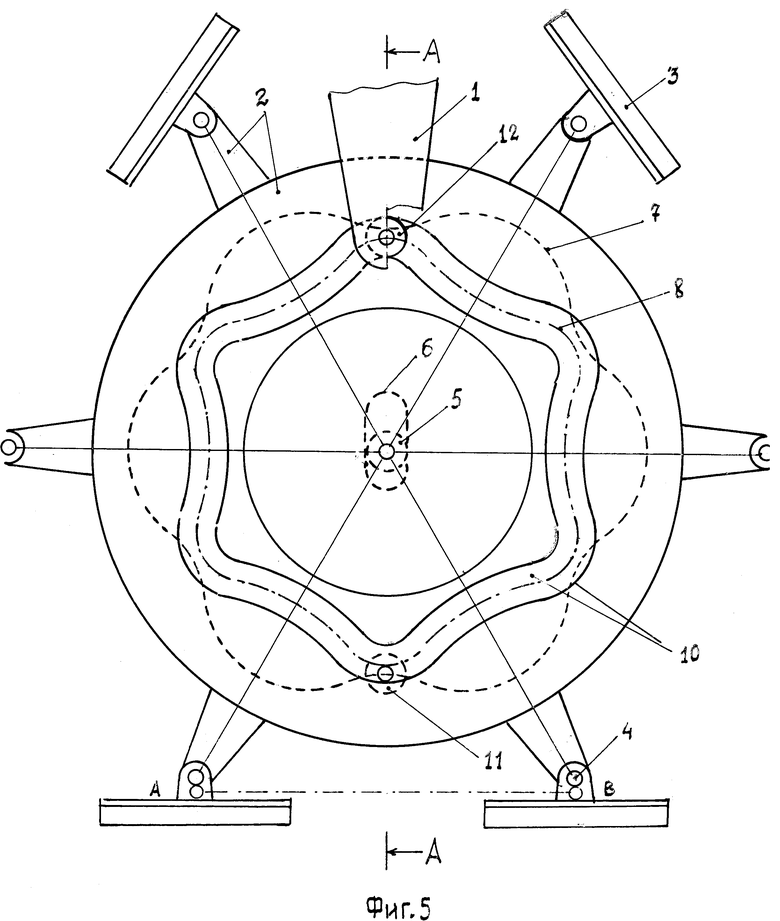
1. Шагающее колесо транспортного средства, содержащее ступицу с опорами по ее периметру, устройство, реализующее поворот ступицы вокруг ее центра и выполнение шагового движения опорами, отличающееся тем, что устройство, реализующее поворот ступицы вокруг ее центра и выполнение шагового движения опорами, осуществлено посредством снабжения ступицы замкнутой направляющей, взаимодействующей с опорным роликом, установленным на несущем шагающее колесо звене, в конструкции транспортного средства, а звена - прямой направляющей, и поворотно связанной с подвижным элементом, выполненным в виде ползуна, или ролика, или блока, установленным в прямой направляющей звена.
2. Шагающее колесо транспортного средства, содержащее ступицу с опорами по ее периметру, устройство, реализующее поворот ступицы вокруг ее центра и выполнение шагового движения опорами, отличающееся тем, что устройство реализующее поворот ступицы вокруг ее центра и выполнение шагового движения опорами, осуществлено посредством поворотной связи ступицы с подвижным элементом, выполненным в виде ползуна, или ролика, или блока, размещенном в прямой направляющей звена, несущего шагающее колесо в конструкции транспортного средства, и снабжения ступицы двумя замкнутыми направляющими, каждая взаимодействующая со своим опорным роликом, установленными: один - вверху от прямой направляющей звена, другой - внизу от прямой направляющей звена.
3. Шагающее колесо транспортного средства, содержащее ступицу с опорами по ее периметру, устройство, реализующее поворот ступицы вокруг ее центра и выполнение шагового движения опорами, отличающееся тем, что опоры на ступице установлены на шарнирах и каждая снабжена двумя дополнительными шарнирами, которые размещены в разной противоположной стороне от шарнира ступицы, несущей опору, причем каждая опора связана с соседней опорой посредством дополнительного звена, установленного на разноименных дополнительных шарнирах опор.
4. Шагающее колесо транспортного средства, содержащее ступицу с опорами по ее периметру, устройство, реализующее поворот ступицы вокруг ее центра и выполнение шагового движения опорами, отличающееся тем, что ступица установлена поворотно на неподвижной оси подвижного блока, или элемента, или ползуна, взаимодействующего с прямой направляющей звена, несущего шагающее колесо в конструкции транспортного средства, причем каждая опора снабжена дополнительным шарниром, размещенным на удалении от шарнира ступицы и связанным посредством дополнительного звена с шарниром подвижного блока, или элемента, или ползуна, находящимся на расстоянии от центра неподвижной оси подвижного блока, или элемента, или ползуна, равном длине расстояния между шарнирами опоры, при этом пространственные прямые, соединяющие шарниры опоры, находящейся в контакте с грунтом, и шарнир подвижного блока и центра ступицы, параллельны.
| Станина пресса | 1978 |
|
SU730607A1 |
| УСТРОЙСТВО ВПУСКА ЖИДКОСТИ, ЕГО ПРИМЕНЕНИЕ И СПОСОБ МОДЕРНИЗАЦИИ ТАКИХ УСТРОЙСТВ | 2006 |
|
RU2424032C2 |
| Шагающее колесо транспортного средства | 1987 |
|
SU1579796A1 |
| Колесо транспортного средства | 1989 |
|
SU1785915A1 |
| CN 103373173 A, 30.10.2013. | |||

