Изобретение относится к весоизмерительной технике и может быть применено, например, для ззвешивания грузов, перевозимых железнодорожным транспортом.
Известен способ поосного взвешивания объектов железнодорожного состава в движении, включающий измерение с помощью весовых модулей осевых усилий объектов, определение направления движения и осности взвешиваемых объектов, нахождение масштабирующих осевых коэффициентов путем тарирования весовых модулей контрольными объектами различной осно- сти, определение массы взвешивания объекта суммированием произведений результатов вззешивания по осям на соответствующие весовые коэффициенты, на- г р ужение при тарировании весо&ых
модулей одной тележки до заданной грузоподъемности, при этом оставляя другую не нагруженной, вычисление и запоминание осевых коэффициентов отдельно для порожней и груженой тележек, проведение оценки в первом приближении веса оси взвешиваемого объекта, по которой, при определении массы взвешиваемого объекта выбирают ряд осевых коэффициентов, соответствующих порожней или груженой тележке.
Недостатками известного способа являются: сложность определения осности подвижных объектов; значительная трудоемкость тарировки весоизмерительного модуля, требующего нагружения контрольными грузами каждого типа подвижного объекта; большая динамика весоизмерительного модуля (а, следовательХ|00
.«ш&
ел
СП
ы
но, и большая динамическая составляющая сигнала, пропорционального массе взвешиваемого объекта) из-за его ударного нагру- жения при въезде тележки подвижного объекта.
Наиболее близким по достигнутому эффекту и технической сущности следует считать способ поколесного взвешивания подвижных объектов, включающий измерение усилий, бЪзникаГющй хтфи прохождении колёсами подвижного вбъбкта весоизмери- тельйых модулей, установленных со сдвигом относительно друг друга, использование пропорциональных измеряемым усилиям сигналов для формирования команд управления процессом взвешивания, определение по измеренным усилиям веса каждой оси, подвижного объекта в целом и совокупности подвижных объектов, при этом обеспечивается сдвиг весоизмерительных модулей относительно друг друга на расстояние, большее межосевого расстояния регистрируемых объектов, но меньшее межосевого расстояния нерегистрируемых объектов, причем начало обработки результатов взвешивания для каждой тележки объекта осуществляется при втором подряд наезде тележки объекта на один и тот же весоизмерительный модуль, а окончание - при втором подряд съезде.
Недостатком этого способа является использование громоздких конструкций весоизмерительного модуля и массивного фундамента в связи с наличием значительных динамических нагрузок в элементах весоизмерительного модуля, возникающих вследствие ударного нагружения модуля при въезде на него колеса подвижного объекта, что усложняет и удорожает реализацию способа;
Другим недостатком названного способа является то, что динамические наг-рузки весоизмерительного модуля обуславливают существенную по величине погрешность измерения веса движущегося объекта за счет присутствия в выходном сигнале весоизмерительного модуля динамической составляющей.
Целью изобретения является повышение точности взвешивания.
Технико-экономические преимущества предложенного способа заключаются в следующем:
техническая реализация способа не требует применения громоздких весоизмерительных платформ и соответствующих им фундаментов, т.е. реализация способа проста и не требует больших капитальных затрат;
при простоте технической реализации обеспечивается высокая точность взвешивания за счет отсутствия в предлагаемых технических решениях весоизмерительного
модуля динамической составляющей измеряемого сигнала, обуславливаемой ударной нагрузкой колеса при его въезде на весоизмерительный модуль;
высокая степень автоматизации про0 цесса взвешивания движущихся объектов без применения специальных датчиков, устанавливаемых на весоизмерительном модуле и в непосредственной от него близости, что повышает удобства при экс5 плуатации и обеспечивает повышенную надежность систему в целом.
Поставленная цель достигается тем, что перед началом измерений на железнодорожном пути устанавливают два весоизме0 рительных модуля, сдвинутых друг относительно друга на величину, равную длине пролета упругой балки весоизмерительного модул я, задаютуровень выходного сигнала в пределах 5-10% от минимальной
5 нагрузки на весоизмерительный модуль и формируют управляющие сигналы при превышении выходным сигналом весоизмерительного модуля заданного уровня, определяют текущую скорость движения
0 каждого колеса при его прохождении через весоизмерительный модуль и измеряют и запоминают интервалы времени при смене колеса на каждом весоизмерительном модуле, по которым определяют тип подвижного
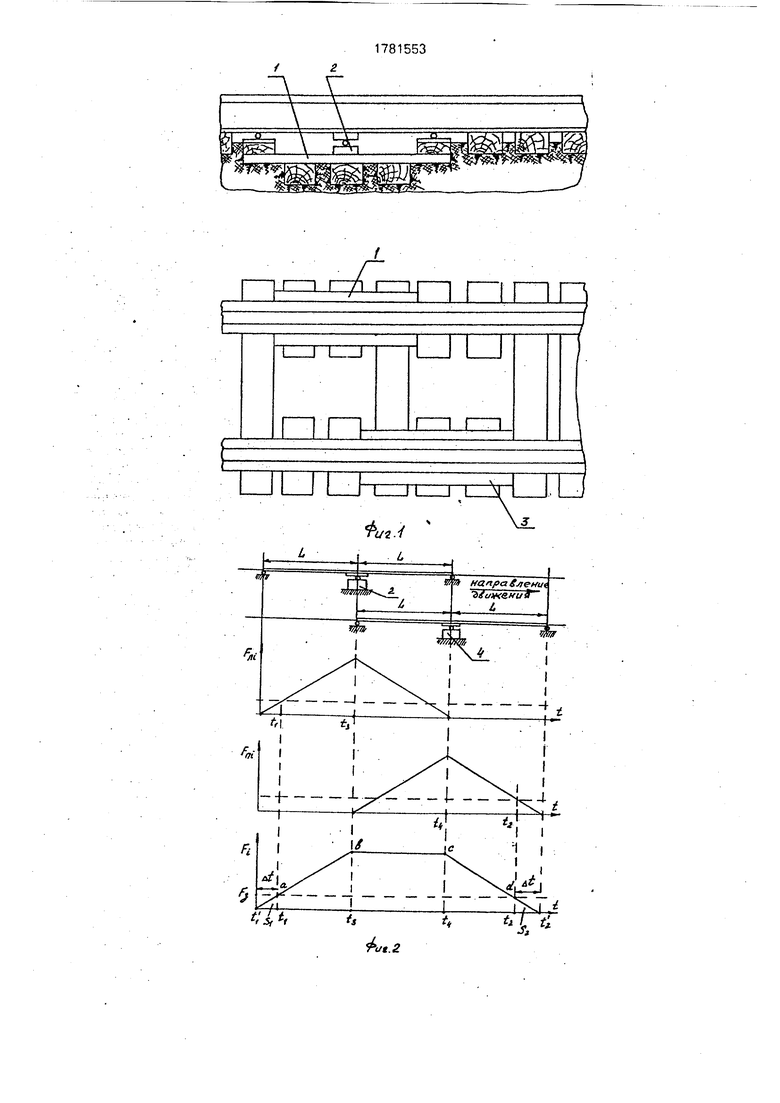
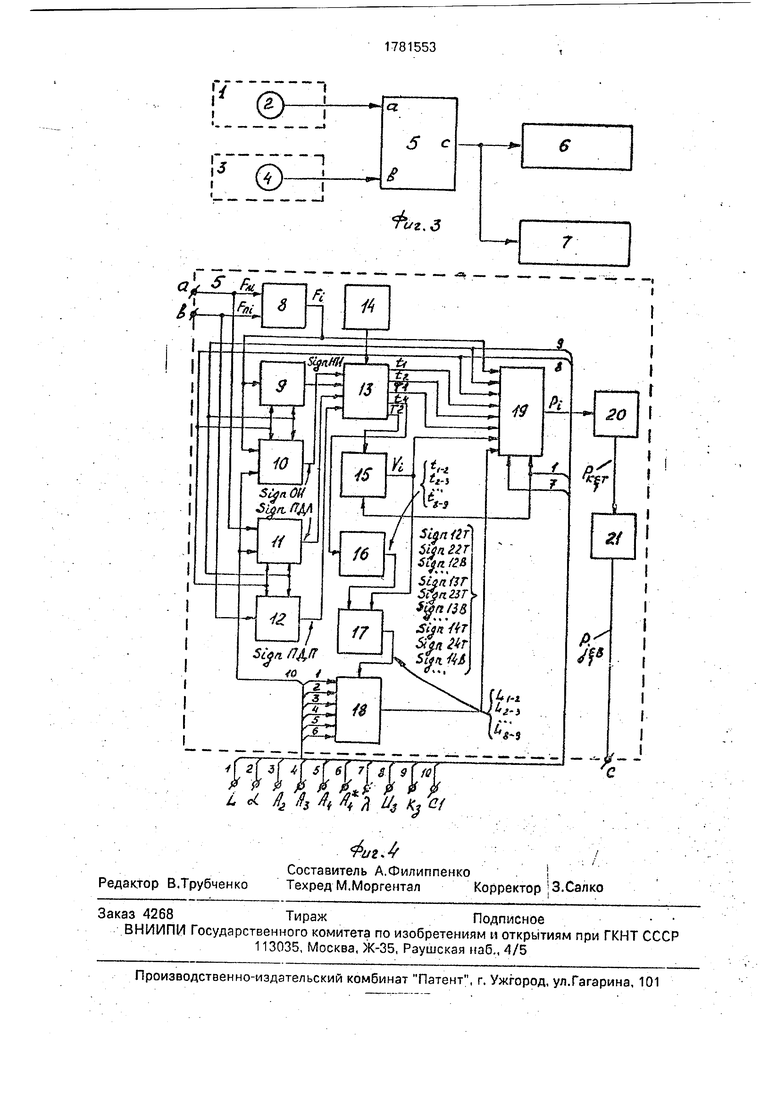
5 объекта, причем усилия измеряют в течение времени нахождения колеса нг весоизмерительном модуле, определяемого управляющими сигналами, и запоминают эти результаты, а вес подвижного объекта опре0 деляют после прохождения им весоизмерительных модулей путем суммирования сигналов, пропорциональных весу каждой пары колес, объединенных одной осью. На фиг. 1 изображена установка весоиз5 мерительных модулей на участке железнодорожного пути; на фиг. 2 - эпюры выходных сигналов силоизмерительных датчиков весоизмерительных модулей и их суммарного сигнала; на фиг. 3 - блочная
0 схема весоизмерительной системы; на фиг. 4 - структурная схема вычислителя.
Левый весоизмерительный модуль 1(фиг. 1) с силоизмерительным датчиком 2 установлен без фундамента на полотне же5 лезнодорожного пути со сдвигом по отношению к правому весоизмерительному модулю 3 с силоизмерительным датчиком 4. Весоизмерительный модуль представляет собой жесткую раму, по центру которой располагается силоизмерительный датчик, а по
краям - цилиндрические опоры, Жесткая рама закреплена на шпалах, Рамы весоизмерительных модулей связаны между собой фиксирующими тягами. Модули устанавливаются под рельсы таким образом, что все три опорные точки (силомзмерительный датчик, цилиндрические опоры) располагаются между соседними шпалами железнодорожного пути, а рамы опираются на укороченные шпалы. Силоизмерительные датчики 2, А подключены к входам вычислителя 5 (см. фиг. 3), выход которого связан с выходным табло б и печатающим устройством 7. Вычислитель 5 (см фиг. 4) содержит: узел 8 суммирования узел 9 формирования сигнала начала измерения Sign НИ, узел 10 формирования сигнала окончания измерения Sign ОИ, узел 11 формирования сигнала прохождения колесом точки установки си- лоизмерительного датчика левого весоизмерительного модуля Sign ПДЛ, узел 12 формирования сигнала прохождения колесом точки установки силоизмерительного датчика правого весоизмерительного модуля Sign ПДП, узел 13 определения и запоми- нания моментов времени начала и окончания измерения веса оси, прохождения колесами точек установки силоизмери- тельных датчиков, таймер 14, узел 15 определения и запоминания текущей скорости движения оси через весоизмерительные модули, узел 16 измерения и запоминания интервалов времени при смене каждого колеса в точке установки силоизмерительного датчика, узел 17 определения и запоминания расстояний между осями движущегося объекта, узел 18 формирования сигналов идентификации движущихся объектов, узел 19 определения и запоминания веса оси движущегося объекта, узел 20 определения и запоминания веса тележки движущегося объекта, узел 21 определения и запоминания веса движущегося объема (вагона) в целом).
Узлы вычислителя соединены между собой следующим образом выход узла 8 подключен к входам узлов 9, 10, 19, выходы узлов 9-12 связаны с входами узла 13, соответствующие выходы которого подключены к входам узлов 15, 16, 19; вьг од узла 14 подключен к входу узла 13, выход узла 15 подключен к входам узлов 17 и 19, выход узла 16 подключен к другому входу узла 17, выход которого связан с входом узла 18; выход узла 18 подключен к входу узла 19, выход которого через узел 20 подключен к входу узла 21; соответствующие входы узлов 9-12, 19 подключены параллельно к источникам сигналов, пропорциональных величинам 1)з, Кч: к входам узла 18 по цепям
1-6 подключены сигналы, пропорциональные величинам L, а, А2. Аз, Аз, A/i , к соответствующим входам узла 9 подключены сигналы, пропорциональные величинам L, Я; к другому входу узла 13 подключен сигнал, пропорциональный величине L
Предлагаемый способ включает следующие основные операции;
устанавливают весоизмерительные мо- дули со сдвигом по отношению друг к другу, равным длине пролета упругой балки весоизмерительного модуля;
задают уровень выходного сигнала из
Ј Рз весоизмерительного модуля для формирования управляющих сигналов в пределах 5-10% от минимальной нагрузки на весоизмерительный модуль, создаваемый колесом незагруженного подвижного объекта;
Формируют следующие сигналы управления процессом взвешивания при превышении выходным сигналом весоизмерительного модуля заданного уровня;
сигнал начала измерения Sign НИ
Г1.если FI KiU3,
,0, если FJ Kills, FI 0: сигнал окончания измерения (1)
1,еслиР| К111з, Sign ОИ (2)
О, если FI KiU3,
Сигнал прохождения колесом точки установки силоизмерительного датчика левого весоизмерительного модуля ft, если РЛ| Kills, Рл Ci
5 дпПДЛ j(3)
0, (в противном случае)
сигнал прохождения колесом точки устапов- ки силонзмерителыюго датчика правого ве- соизмерительногоо модуля /1,если Fni KiUj, FmSiCi, Sign ПДП /(4)
I 0 (в противном случае)
где FI - суммарное усилие, создаваемое проходящими через весоизмерительные модули левым и правым колесами, сочлененными од- ной осью подвижного объекта;
К}- коэффициент пропорциональности;
Us - заданный уровень выходного сигнала силоизмерительного датчика весоизмерительного модуля;
U3 (0,05 + 0,1)Umln
Umin - выходной сигнал при минимальной нагрузке на колесо подвижного объекта;
FI - первая производная суммарного усилия, создаваемого проходящими через весоизмерительные модули левым и правым колесами, сочлененными одной осью подвижного объекта;
Рл1, Fni, , Fni - усилия, создаваемые левым и правым колесами, сочлененными одной осью, при их прохождении через соответствующие весоизмерительные модули и их вторые производные;
Ci - заданный уровень второй производной Рл |, Fni;
определяют текущую скорость движения каждого колеса при его прохождении через весоизмерительный модуль:
(6)
где L - длина пролета упругой балки весоизмерительного модуля;
) - длительность прохождения i-ой оси подвижного объекта расстояния между точками установки силоизмерительных датчиков левого и правого весоизмерительных модулей;
(T2)i t4 - тз; .
(7)
13- момент времени прохождения колесом точки установки силоизмерительного датчика левого весоизмерительного модуля;
, ta treK/Sign ПДЛ 1; (8)
t4- момент времени прохождения-колесом точки установки силоизмерительного датчика правого весоизмерительного модуля:
Т4-Ттек/5 дпПДП 1; (9)
измеряют и запоминают интервалы времени при смене колеса на каждом весоизмерительном модуле в момент прохождения им точки установки силоизмерительного датчика, например правого весоизмерительного модуля ti-2, ta-з. ta-4te-э:
определяют гип подвижного объекта при его прохождении через весоизмерительные модули:
вагон двухтележечный с двухосными тележками:
Sign 12B
П, если Sign 12T 1. Sign 22T-1;
О, в противном случае.
(Ю)
где Sign 12T 1, Sign 22T 1 - сигналы прохождения первой и второй тележек:
Slgnl2T
Sign22T
1, если (1 - а)А2 Li-2 (1 + «)А2; 1.2-3 (1 + а)А2;
3, в противном случае,
1, если (1 - «)А2 Ls-4 (1 + «)А2; 1.4-5 (1 + а)А2;
|, в претивном случае
а. - 0,1-0,2 - коэффициент, учитывающий погрешность определения , L2-3 - расстояния между соседними осями вагона;
Аа - межосевое расстояние двухосной тележки
вагон двухтележечный с трехосными тележ- ками;
Sign 13B
/
1о.
1, если Sign , Sign 23Т 1;
в противном случае.
где Sign 13T 1, Sign 23T 1 - сигналы прохождения первой и второй тележек
I, если (1 - а) Аз Li-2 (1 + а)Аз; 35/L2-3 (1 + а)Аз;
Sign13T(1.3.4 (1 + а) Аз ;
Sig n23T:
1Д в противном случае,
если (1 - «)Аз Ц-5 (1+а)Аз; L.5-6 (1 +а) Аз; Le-7 (1 + а)Аз;
$, в противном случае. Аз - расстояние между осями в трехосной тележке;
вагон двухтележечный с четырехосными тележками:
/-1, если Sign 14T 1. Sign 24T 1; Sign 14B
u
в противном случае,
где Sign 14T 1, Sign 24T 1 - сигналы прохождения первой и второй тележек.
I, если (1- «)А4 ЈLi-2 (1+ а)А4; (1-а)А4 (1+а)А4; Sign 14T (1-«)А4 1з-4 (1 + «)А4;
U-5(1+«)A/i; 0, в противном случае,
1, если (1-a)A/j Ls-6 (1+a)A4: (1-a) (1+а)АЪ; Sign 24T (1-«)A4 7-8 (I+G&A
U-9 (1+a)A-i; . 0. в противном случае где - расстояние между крайними и внутренними осями четырехосной тележки;
А4 расстояние между внутренними осями четырехосной тележки. Измеряют усилия в течение времени нахождения колеса на весоизмерительном модуле, определяемого управляющими сигналами, и запоминают эти результаты измерения.
г с Д-Р f F dt
Pi - Ря, + Fn, - / г
(13)
где Рл, Fni - усилия, создаваемые проходящими через левый и правый весоизмерительные модули колесами подвижного объекта РЛ| Fn KiUni;
KI - коэффициент пропорциональности U/,1, Uni - выходные сигналы силоизме- рительных датчиков, левого и правого весоизмерительных модулей;
ti - момент времени начала измерения усилий от массы оси движущегося объекта при его прохождении через весоизмерительные модули:
Т1 Ттек/51дп НИ 1:
t2 - момент времени окончания измерения усилия от массы оси движущегося объекта при его прохождении через весоизмерительные модули.
t2 tTeK/Sign ОИ 1;
Вес подвижного объекта определяют пойле прохождения им весоизмерительных модулей путем суммирования сигналов, пропорциональных массе каждой пары колес, объединенных одной осью:
PT). (14)
1
2,3 Р,(15)
где PTJ масса J-ой тележки вагона PI - масса i-ой оси j-ой тележки;
Р|
Pi + Ki U3 At
Тц +2 At,
(16)
At 3L-ViTii Л ЙЦ
(17)
где Ti t2 - ti - длительность прохождения осью подвижного объекта рабочей зоны весоизмерительных модулей (интервал взве- шигания).
При реализации предлагаемого способа предусматривается использование двух ве- 0 соизмерительных модулей 1, 3 (см. фиг. 1), которые монтируются в полотне железнодорожного пути без фундамента и имеют незначительное заглубление. Этот фактор существенно упрощает монтажные работы и не требует строительных работ, что резко снижает капитальные затраты.
Конструкция весоизмерительных модулей предполагает использование в качестве упругого силоизмерительного элемента части рельсов железнодорожного пути и обеспечивает плавное нагружение силоиэмери- тельного датчика при въезде колеса на весоизмерительный модуль. Это обстоятельство обеспечивает минимум динамической составляющей в сигнале, пропорциональном весу движущегося чрез весоизмерительный модуль объекта, что в свою очередь, обуславливает достаточно низкую погрешность взвешивания при применении относительно простых способов и средств измерения.
Конструкция весоизмерительных модулей и их взаимное расположение позволяет сформировать сигналы управления процессом взвешивания без использования допол- нительных датчиков. Измерение суммарного сигнала FI на интервале 12 - ti и последующее нахождение его среднего назначения, т.е. определение величины
5
0
5
0
5
40
12
Г Pidt
5
0
5
F,1
t2 -tl
обеспечивает использование в максимальном объеме первичной информации о весе движущегося объекта. В этом случае случайная составляющая погрешность взвешивания имеет минимальное значение,
В предлагаемом способе предусматривается формировать сигнал начала взвешивания в момент времени ti и окончание - в момент времени t2, что позволяет принципиально избежать применения соот ветству- ющих датчиков положения колеса на весоизмерительном модуле. Моменты времени ti, t2 легко формируются аппаратным средствами и заданием величины Рз, которую целесообразно определять в пределах
(0,05-0.1)Fmin,
где Fmin - минимальное значение суммарного усилия, создаваемого порожним транспортным средством при прохождении весоизмерительного модуля, Но в случае
/ FI d t равен площади фигуры tiabcdt2 (фиг, ti
Ч
2), которая меньше величины J Fi d t на веti
личину Рз At Si + 82. где Si - площадь треугольника ti tia, 82 - площадь треугольника t2 tad. Следовательно, можно написать
J Rdt
+ Ki Уз At
Р ti
Г ш
Ti +2 At
где Ki Us - Рз,
Ki-коэффициент пропорциональности;
Уз - выходной сигнал силоизмеритель- ного датчика;
At
Ti t2-ti; 3L-V, -Ti
2V(
поскольку Vi -2 At + ViTi - 3L,
где Vj / j т. const при малых значениях
(Г2)ь
(Ta)i t4- ts,
где L - длина пролета упругой балки весоизмерительного модуля;
ts, t4 моменты прохождения колесом подвижного объекта точки установки сило- измерительного датчика весоизмерительного модуля.
Моменты ts, U можно определить путем нахождения второй производной РЛ1, Fni и ее сравнения с заданной величиной С1, превышающей уровень помех, образующихся при дифференцировании РЛ|, Fni.
При идентификации движущихся объектов (формулы 10-12) предусматривается контроль межосевых расстояний в тележках вагонов. Поскольку межосевые расстояния в тележках локомотивов отличаются от меж- осееых расстояний вагонов всех типов, то при проходе локомотивом весоизмерительного модуля сигналы идентификации всех видов равны нулю и, следовательно, результаты взвешивания осей локомотива не выдаются на выходные табло и печатающие устройства.
Работа весоизмерительной системы. Перед началом функционирования системы определяют и вводят постоянные величины
L, a, Ki. Ci, А2, Аз, А4, А4 , Ua, которые определяют условия работы системы. Пусть в направлении, указанном стрелкой (см фиг, 2) с постоянной скоростью движется
состав железнодорожных вагонов без локомотива в голове состава. Тогда, при наезде левого колеса первой оси первой тележки первого вагона на весоизмерительный модуль 1 на выходе датчика 2 формируется
выходной сигнал - Рл, имеющий треугольную форму при развертке по оси времени. Аналогичный сигнал Fni имеет место на выходе датчика 4 при наезде правого колеса на весоизмерительный модуль 3. Указанные
сигналы (см. фиг. 3) поступают на входы а, в, вычислителя 5, на выходе с которого формируется информация о весе вагона, прошедшего через весоизмерительные модули. Аналогично взвешиваются и все последующие вагоны в составе. Результаты взвешивания выдаются на выходное табло б для визуального считывания и на печатающее устройство 7 для формирования документа. Рассмотрим подробнее работу
вычислителя 5 (фиг. 4). Выходные сигналы с датчиков 2, 4 поступают на входы а, в узла 8, в результате чего на его выходе формируется сигнал FI (формула 1), который поступает на входы узлов 9, 10, 19. В
результате этого в момент выполнения условий FI KiU3, F 0 на выходе узла 9 формируется сигнал Sign НИ 1 (формула (4), который поступает на вход узла 13. При возникновении условий FI Kills, F 0 на выходе узла 10 формируется сигнал Sign ОИ 1, который также поступает на вход узла 13 В моменты прохождения колесами точек установки датчиков 2, 4 на выходах узлов 11,12 формируются сигналы Sign ПДЛ 1 (формула 6), Sign ПДП 1 (формула 7), которые поступают на соответствующие входы узла 13. В результате этого узлом 13 формируются и запоминаются моменты времени начала ti (формула 8) и окончания t2 (формула 9)
измерения веса оси движущегося объекта при его прохождении через весоизмерительные модули (см. фиг. 2), моменты време- ни тз, IA прохождения колесом точки установки силоизмерительного датчика левого и правого весоизмерительных модулей (формулы 11,12); длительность Ti прохождения осью движущегося объекта рабочей зоны весоизмерительного модуля (формула 10); длительность Т2 прохождения осью расстояния между точками установки силоиз- мерительных датчиков левого и правого весоизмерительных модулей (формула 13). С выхода узла 13 выходные сигналы Т2 и поступают соответственно на выходы узлов
15, 16, на выходах которых формируются
сигналами Vi (формула 14) и ti 2, t2-3te-9.
Выходные сигналы узлов 15-16 поступают на входы узла 17, в результате чего на его
выходе формируются сигналы Li-2, L2-3
La-g (формула 15), которые поступают на вход узла 18. На выходе узла 18 при прохождении весоизмерительных модулей подвижными объектами формируются сигналы идентификации: при прохождении первой двухосной тележки первого вагона в составе с двухосными тележками Sign 12T 1 (формула 16), при прохождении второй двухосной тележки первого вагона в составе с двухосными тележками Sign 22T 1 (формула 17) при прохождении первого вагона в составе с двухосными тележками Sign 12B 1 (формула 18) и аналогично формируются сигналы прохождения следующих двухосных тележек и вагонов с двухосными тележками в составе. Подобным же образом формируются сигналы для трехосных тележек вагона Sign 13T 1, Sign 23T 1, Sign 13В 1, ...(формулы 19. 20, 21), для четырехосных тележек вагона Sign 14T 1, Sign 24T 1, Sign 24В I (формулы 22, 23, 24). Выходные сигналы узлов 13 (ti, 2 TI), 15(Vi). 18, а также сигналы, пропорциональные L, А, поступают на входы узла 19, на выходе которого формируется и запоминается информация о весе каждой оси тележки Pi (формулы 26, 27). Указанные сигналы с выхода узла 19 поступают на вход узла 20, в котором формируется информация о весе тележки (Pk t) (формула 25-32). С выхода узла 20 сигнал поступает на вход узла 21, на выходе которого формируется информация о весе каждого типа вагона (Pj «ь), (формулы 33-35).
Таким образом, рассмотренное устройство реализует предложенный способ аппаратными средствами. Способ может быть успешно реализован на базе программируемых средств вычислительной техники путем разработки и использования соответствующей программы.
Формулаизобретения Способ поколесного взвешивания подвижных объектов, заключающийся в том,
что перед началом измерений на железнодорожном пути устанавливают два весоизмерительных модуля, сдвинутых друг относительно друга, и при прохождении их колесами подвижного объекта измеряют
усилия, по которым определяют вес подвижного объекта, отличающийся тем, что, с целью повышения точности, весоизмерительные модули сдвигают на величину, равную длине пролета упругой балки
весоизмерительного модуля, задают уровень выходного сигнала в пределах 5-10% от минимальной нагрузки на весоизмерительный модуль и формируют управляющие сигналы при превышении выходным сигналом весоизмерительного модуля заданного уровня, определяют текущую скорость движения каждого колеса при его прохождении через весоизмерительный модуль и измеряют и запоминают интервалы времени при
смене колеса на каждом весоизмерительном модуле,- по которым определяют тип подвижного объекта, причем усилия измеряют в течение времени нахождения колеса на весоизмерительном модуле, определяемого управляющими сигналами, и запоминают эти результаты, а вес подвижного объекта определяют после прохождения им весоизмерительных модулей путем суммирования сигналов, пропорциональных весу
каждой пары колес, объединенных одной осью.
ч 
Использование: измерение веса грузов, перевозимых железнодорожным транспортом. Сущность изобретения- при взвешивании объекта устанавливают на железнодорожном пути два весоизмерительных модуля, сдвинутых друг относительно друга на величину, равную длине пролета упругой балки модуля, задают уровень выходного сигнала в пределах 5-10% от минимальной нагрузки на модуль и формируют управляющие сигналы при превышении выходным сигналом модуля заданного уровня, определяют скорость движения каждого колеса при его прохождении через модуль, измеряют и запоминают интервалы времени при смене колеса на каждом модуле, по которым определяют тип объекта, причем усилия измеряют в течение времени нахождения колеса на модуле и запоминают эти результаты, з вес объекта определяют после прохождения им модулей путем суммирования сигналов, пропорциональных весу каждой пары колес, объединенных одной осью. 4 ил, LO
I-I I-I
egsiea
Г/ - I
i .
А
7 S(,iQ
ъ f.
Р J
/j % 4 /
л
6/2. J
| Способ поосного взвешивания объектов железнодорожного состава в движении | 1987 |
|
SU1425465A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ поколесного взвешивания подвижных объектов | 1986 |
|
SU1372194A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
