Изобретение относится к области точного приборостроения, в частности к гироскопам на магнитном подвесе, и может быть использовано в качестве двухосного инерциального блока.
Известен магнитосферический гироскоп, содержащий ротор и статоры магнитных подвесов, электропривод ротора, датчики угла и момента. При этом электромагнитные подвесы выполнены по двухосной, трехосной и четырехосной схеме. Для трехосных подвесов предложено измерять действующее на основание ускорение по величине напряжения на резонансном конденсаторе. (Осокин Ю.А. и др. Теория и применение электромагнитных подвесов, - М.: Машиностроение, 1980, с. 198). Недостатком известного гироскопа является конструктивная сложность реализации необходимых элементов в трехосной конструкции.
Наиболее близким аналогом изобретения, взятым в качестве прототипа, является устройство с магниторезонансным подвесом ротора (авт.св. 1795284, кл.G 01 C 19/24, публ. БИ 6-93), содержащее сферический ротор, многополюсный статор с электрическими контурами, настроечные емкости, регулировочные сопротивления, использующим электромагнитный подвес для вращения ротора гироскопа.
Недостатками известного устройства являются наличие нутаций при разгоне ротора гироскопа, что удлиняет время готовности и не позволяет использовать гироскоп в режиме прецезионного управления через датчик момента.
Задачей изобретения является расширение функциональных возможностей и области применения гироскопа с четырехосным магниторезонансным подвесом.
Поставленная задача решается тем, что в магнитосферическом гироскопе, содержащем сферический ротор, двухкоординатные датчики угла и момента, верхний и нижний статоры подвеса ротора с электромагнитными обмотками, резонансные конденсаторы и диодные демпфирующие мосты, последовательно соединенные с электромагнитными обмотками, введены блок выработки составляющих ускорения и электродвигатель, сферический ротор снабжен токопродящим пояском, а в диагонали диодных демпфирующих мостов включены корректирующие контуры, блок выработки составляющих ускорения включает сумматоры и усилители-преобразователи, при этом входы сумматоров подключены параллельно входам корректирующих контуров попарно для каждой из четырех осей подвеса ротора, входы первого усилителя-преобразователя соединены с выходами первого и третьего сумматоров, входы второго усилителя-преобразователя соединены с выходами второго и четвертого сумматоров, а выходы третьего усилителя-преобразователя соединены с выходами всех четырех сумматоров.
Наличие указанных признаков позволяет сделать вывод о новизне технического решения.
При сравнении заявленного решения с другими техническими решениями в данной области техники не выявлена совокупность признаков, отличающих заявленное решение от прототипа, что позволяет сделать вывод о соответствии технического решения критерию "изобретательский уровень". Таким образом, заявленное техническое решение является новым, имеет изобретательский уровень, промышленно применимо.
Сущность изобретения поясняется чертежами, где на фиг. 1 показан магнитосферический гироскоп с магниторезонансным подвесом ротора; на фиг. 2 - схема магниторезонансного подвеса ротора гироскопа; на фиг. 3 - схема блока выработки составляющих ускорения.
Магнитосферический гироскоп содержит ротор 1, расположенный в вакуумированной камере 2. В экваториальной части ротора расположен токопроводящий поясок 3, а на корпусе - обмотки электродвигателя 4. На верхнем и нижнем статоре подвеса расположены по четыре полюса подвеса 5, 6 и 7, 8, образующие оси подвеса (О1 и О3) с рабочими обмотками 9, 10 и 11, 12 соответственно. Перпендикулярно плоскости чертежа расположены также четыре полюса подвеса с осями О2, О4 (не показано). Для измерения положения оси ротора 1 относительно статора и управления им установлены двухкоординатные датчики угла и момента 15.
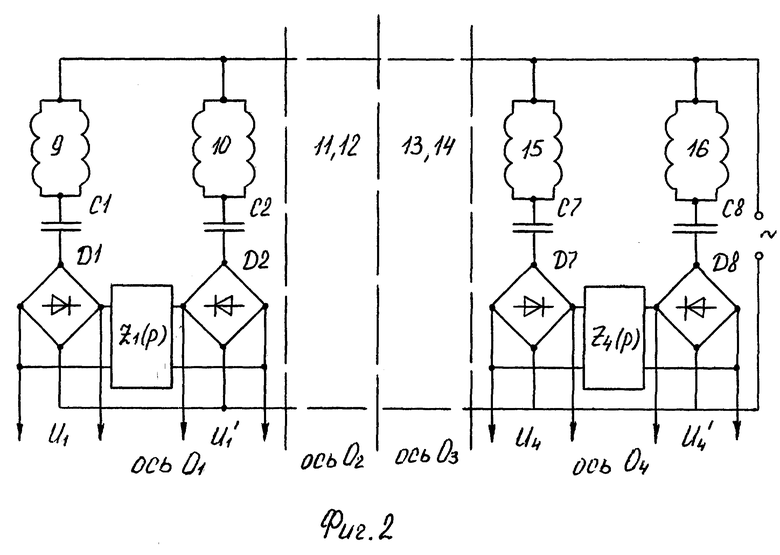
Схема магниторезонансного подвеса ротора содержит электромагнитную обмотку 9 на верхнем статоре и обмотку 10 на нижнем статоре подвеса, которые образуют ось подвеса О1. Последовательно с обмотками включены резонансные конденсаторы C1 и C2 и диодные демпфирующие мосты DI и D2, в диагонали которых включен корректирующий контур Z1 (р). Схема подвеса по осям О2, О3 и О4 выполнена аналогично.
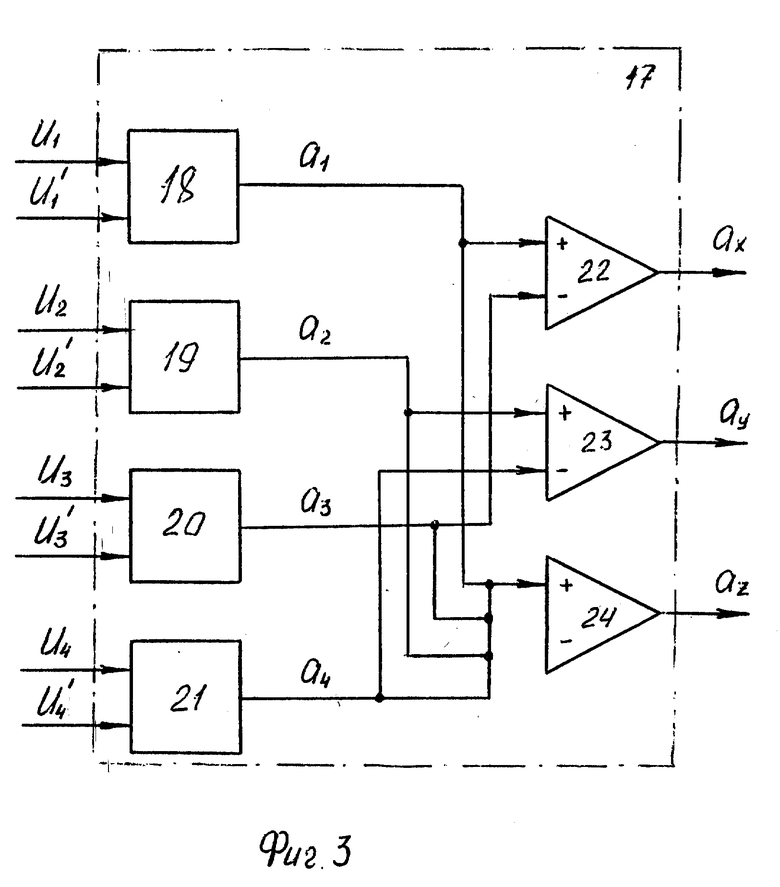
Схема блока выработки составляющих ускорения 17 содержит сумматоры 18, 19, 20 и 21, которые подключены параллельно входам корректирующих контуров Z (р) схемы подвеса. Выходы сумматоров 18, 19, 20 и 21 соединены со входами усилителей-преобразователей 22, 23 и 24. Сумматоры и усилители-преобразователи могут быть выполнены на микросхемах серии 140 УД17 и резисторах.
Устройство работает следующим образом. При включении питания схемы подвеса ротор 1 гироскопа "всплывает" в камере 2 и после подачи питания на обмотки двигателя 4 разгоняется до номинальных оборотов.
При действии ускорения на основание прибора, ротор 1 гироскопа смещается относительно геометрического центра статора, в результате чего изменяются зазоры между полюсами 5, 6 или 7, 8 подвеса и поверхностью ротора. Увеличение зазора между любым полюсом и ротором 1 приведет к увеличению тока через электромагнитную обмотку данного полюса, уменьшение зазора приведет к уменьшению тока.
Действующее на прибор ускорение измеряется в системе координат X, H, Z, связанной с основанием прибора. На входах корректирующих контуров Z(p) и сумматоров 18, 19, 20 и 21 по каждой оси подвеса появятся напряжения, пропорциональные проекции ускорения на соответствующую ось подвеса; при этом на выходе сумматоров будут величины проекций ускорения, действующие по каждой оси подвеса: U1 - U'1 = a1; U2 - U'2 = a2; U3 - U'3= a3 и U4 - U'4 = a4. На выходах усилителей 22, 23 и 24 (фиг. 3) вырабатываются проекции действующих по осям основания отмасштабированные величины ускорений для горизонтальных осей X,У:
ax = kx(a1 - a3);
ay = ky(a2 - a4);
и для вертикальной оси Z:
az = kz(a1+a2+a3+a4),
где ax, ay, az - проекции действующего ускорения по осям основания прибора:
kx, ky, kz - коэффициенты, определяемые при тарировке прибора и устанавливаемые на усилителях 22, 23 и 24.
a1, a2, a3, a4 - проекции действующего ускорения на оси подвеса, пропорциональные измеренной разности напряжений.
Придание гироскопу свойств акселерометра путем схемных решений имеет синергический эффект, так как на основе измерения действующего ускорения в матмодели ошибок могут быть скомпенсированы баллистические составляющие скорости ухода гироскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1997 |
|
RU2130118C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТАВЛЯЮЩИХ УСКОРЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА ГИРОСКОПА | 1996 |
|
RU2121695C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ ОПТИЧЕСКИХ КАНАЛОВ | 2024 |
|
RU2831620C1 |
| УСТРОЙСТВО ПОДВЕСА ФЕРРОМАГНИТНОГО СФЕРИЧЕСКОГО РОТОРА | 1996 |
|
RU2156441C2 |
| Электромагнитный подвес | 1977 |
|
SU709950A1 |
Гироскоп предназначен для использования в качестве двухосного инерциального блока. Гироскоп содержит сферический ротор, двухкоординатные датчики угла и момента, верхний и нижний статоры подвеса ротора с электромагнитными обмотками, резонансные конденсаторы и диодные демпфирующие мосты. Мосты последовательно соединены с электромагнитными обмотками. Гироскоп дополнительно содержит блок выработки составляющих ускорения и электродвигатель. Сферический ротор снабжен токопроводящим пояском. В диагонали диодных демпфирующих мостов включены корректирующие контуры. Блок выработки составляющих ускорения включает сумматоры и усилители-преобразователи. Входы сумматоров подключены параллельно входам корректирующих контуров попарно для каждой из четырех осей подвеса ротора. Входы первого усилителя-преобразователя соединены с выходами первого и третьего сумматоров, входы второго усилителя-преобразователя с выходами второго и четвертого сумматоров, выходы третьего усилителя-преобразователя- с выходами всех четырех сумматоров. Обеспечивается расширение функциональных возможностей гироскопа. 3 ил.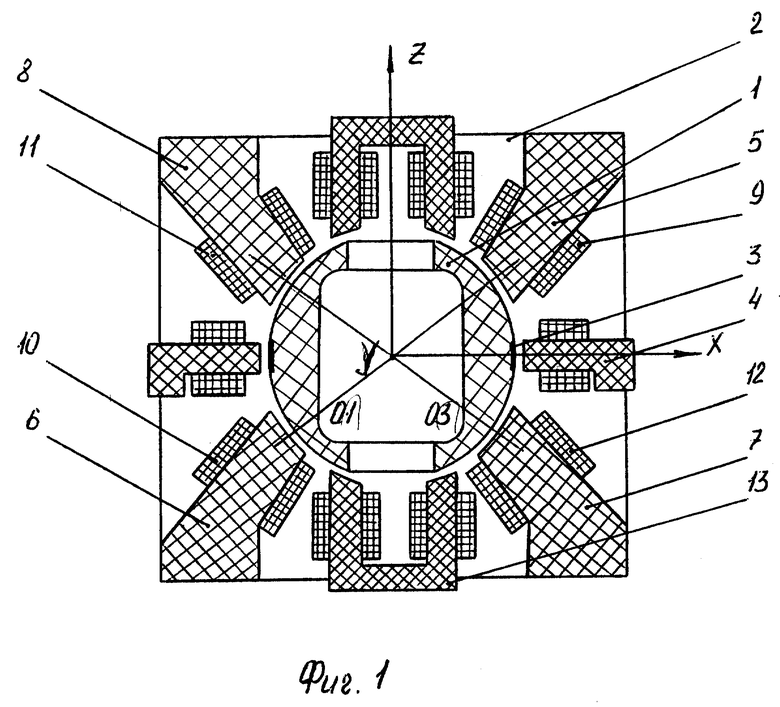
Магнитосферический гироскоп, содержащий сферический ротор, двухкоординатные датчики угла и момента, верхний и нижний статоры подвеса ротора с электромагнитными обмотками, резонансные конденсаторы и диодные демпфирующие мосты, последовательно соединенные с электромагнитными обмотками, отличающийся тем, что в него введены блок выработки составляющих ускорения и электродвигатель, сферический ротор снабжен токопроводящим пояском, а в диагонали диодных демпфирующих мостов включены корректирующие контуры, блок выработки составляющих ускорения включает сумматоры и усилители-преобразователи, при этом входы сумматоров подключены параллельно входам корректирующих контуров попарно для каждой из четырех осей подвеса ротора, входы первого усилителя-преобразователя соединены с выходами первого и третьего сумматоров, входы второго усилителя-преобразователя - с выходами второго и четвертого сумматоров, а выходы третьего усилителя-преобразователя - с выходами всех четырех сумматоров.
| Устройство с магниторезонансным подвесом ротора | 1991 |
|
SU1795284A1 |
| Осокин Ю.А | |||
| и др | |||
| Теория и применение электромагнитных подвесов | |||
| - М.: Машиностроение, 1980, с.198, RU 2064163 C1, 20.07.96 | |||
| RU 94039635 A1, 20.08.96 | |||
| RU 94010338 A1, 20.11.95 | |||
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КАЧЕСТВА КОЛЬЦЕВОГО СОЕДИНЕНИЯ (ВАРИАНТЫ) | 2000 |
|
RU2175126C1 |
| US 4570507 A, 18.02.86. | |||
