Изобретение относится к автоматическому управлению, а именно к реализации двухпозиционных регуляторов с адаптивными позициями, и может быть использовано как при автоматизации промышленных объектов, так и объектов бытовой техники для автоматического регулирования в них тех или иных технологических величин.
Известен способ (см., например, А.А.Кампе-Немм. Автоматическое двухпозиционное регулирование. М.: Наука, 1967. - 160 с.) реализации двухпозиционного регулятора, основанный на фиксированном задании его зоны неоднозначности и регулирующих сигналов, соответствующих его двум позициям. Такой способ, хотя и прост при технической реализации, однако не обеспечивает в системе регулирования требуемого качества, особенно при возмущениях, например по нагрузке на объект.
Для улучшения качества регулирования прибегают к различным способам. Так, при больших запаздываниях в объекте регулирования используют двухпозиционные статические системы регулирования (см., например, В.Г.Матвейкин, С.В.Фролов, И.А.Елизаров. Расчет двухпозиционных систем регулирования. // Приборы и системы управления. 1997, №6, С.37-39). При таком регулировании, однако, приходится решать компромиссную задачу между уменьшением амплитуды установившихся колебаний переходного процесса и увеличением их частоты.
Одновременного уменьшения как амплитуды колебаний, так и их частоты можно добиться путем использования так называемого способа регулирования с неполным притоком и оттоком, в котором добиваются максимального приближения значений регулирующих сигналов к нагрузке, с которой работает объект (способ описан, например, в той же монографии А.А.Кампе-Немм. Автоматическое двухпозиционное регулирование. М.: Наука, 1967. - С.27, 28).
Способ дает удовлетворительные результаты лишь при постоянной нагрузке, меняющейся в пределах регулирующих сигналов, соответствующих двум позициям регулятора, значения которых должны быть заданы вручную.
Если же нагрузка выходит за пределы этих сигналов, то объект становится неуправляемым и регулируемая технологическая величина не достигает требуемых (задаваемых) значений. В этом случае необходима новая ручная перенастройка значений регулирующих сигналов с тем, чтобы нагрузка оказалась внутри их пределов.
Автоматическая перенастройка сигнала средней позиции под нагрузку, с которой работает объект, реализована, например, в трехпозиционном регуляторе по способу, описанному в патенте №2220432 (G05В 13/02, G05В 11/18 МКИ 7). Однако в этом способе подстраивается сигнал лишь одной средней позиции регулятора, в то время как в двухпозиционном регуляторе подстраивать под нагрузку, с которой работает объект, следует регулирующие сигналы двух позиций регулятора, что требует иного подхода к адаптации сигналов позиций.
Автоматическая перенастройка двух значений регулирующих сигналов под нагрузку, с которой работает объект, реализована, например, в способе-прототипе по патенту №2129726, МКИ 6 G05В 11/16, G05В 11/54. Реализация способа требует создания специального адаптивного двухпозиционного регулятора с шестью элементами сравнения с пороговыми элементами, формирующими дискретные управляющие командные сигналы, и релейного (с нулевой зоной неоднозначности) элемента с изменяющимися значениями верхней и нижней позиций.
Большое число переключающихся (пороговых) элементов естественно снижает надежность работы такого регулятора.
Кроме того, большое число промышленных и бытовых объектов уже содержат двухпозиционные регуляторы (по некоторым оценкам позиционные системы регулирования составляют 15-20% всего парка промышленных систем регулирования и 70-80% парка систем регулирования бытовой техники), управляющие их работой по поддержанию в них той или иной технологической величины на заданном значении, то есть по ее регулированию.
В этом плане целесообразно создание способа, позволяющего преобразовывать существующие действующие двухпозиционные регуляторы, а соответственно, и действующие двухпозиционные системы регулирования, в адаптивные, например, путем подключения к действующим регуляторам устройства-приставки, придающей этим регуляторам новое свойство - свойство адаптации их позиций к нагрузке, с которой работает объект, для улучшения качества регулирования технологических величин. Если к тому же такое устройство-приставку реализовать с минимальным использованием контактных (пороговых) элементов, то повышается надежность работы систем адаптивного двухпозиционного регулирования.
Ниже предлагается способ, позволяющий реализовать адаптацию позиций имеющихся двухпозиционных регуляторов с минимальным использованием дополнительных контактных устройств. Способ позволяет улучшить качество регулирования технологических величин в сравнении с традиционным двухпозиционным регулированием и повысить надежность адаптивного двухпозиционного регулирования в сравнении с существующим способом-прототипом, а также упростить создание систем адаптивного двухпозиционного регулирования.
Блок-схема устройства, реализующего предлагаемый способ, показана на фиг.1. Блок-схема устройства заключена в пунктирный прямоугольник. На фиг.1 цифрами обозначены: 1 - традиционный двухпозиционный регулятор с фиксированной зоной неоднозначности ΔY=Y2-Y1 и фиксированными позициями, 2 - входной канал регулируемой технологической величины Y, 3 - элемент сравнения ЭС регулятора 1, 4 - пороговые элементы переключения позиций регулятора, 5 - выходной канал регулятора 1, 6 - входной канал устройства-приставки 7, придающего регулятору 1 новое свойство - свойство адаптации его позиций к нагрузке, с которой работает технологический объект управления (ТОУ), 8 - алгебраический сумматор АС, 9, 10 - звенья типа насыщения - нелинейные элементы, соответственно первый НЭ1-9 и третий НЭ3-10; 11, 12 - функциональные звенья перенастройки, соответственно первое ФЗП1 - 11 и второе ФЗП2 - 12; 13, 14 - звенья памяти, соответственно первое П1 - 13 и второе П2 - 14; 15, 16 - сумматоры сигналов, соответственно первый С1 - 15 и второй С2 - 16; 17, 18 - звенья типа насыщения - нелинейные элементы, соответственно второй НЭ2 - 17 и четвертый НЭ4 - 18, 19 - нормально замкнутый (размыкающийся) контакт К1, 20 - нормально разомкнутый (замыкающийся) контакт К2, 21 - выходной сумматор С3, 22 - выходной канал устройства-приставки 7; 23, 24 - входные каналы задания в регуляторе 1 зоны возврата (реадаптации) путем подачи в них сигналов соответственно  в канал 23 и
в канал 23 и  в канал 24.
в канал 24.
Элемент сравнения 3 регулятора 1 предназначен для сравнения сигналов задания Y1 и Y2 (Y1<Y2) зоны неоднозначности ΔY с сигналом регулируемой технологической величины Y, подаваемой во входной канал 2 регулятора 1. Пороговые устройства 4 обеспечивают пороговые (скачкообразные) изменения сигналов, соответствующих позициям регулятора 1, соответственно крайней верхней - ВП и крайней нижней - НП. Переключение сигнала с крайней нижней позиции (НП) на верхнюю (ВП) происходит при достижении регулируемой технологической величиной Y значения сигнала Y2, то есть при выходе величины Y из зоны неоднозначности ΔY за Y2, а переключение с крайней верхней (ВП) позиции на нижнюю (НП) - при уменьшении величины Y до значения Y1, то есть при выходе величины Y из зоны ΔY за Y1. Выходной сигнал U регулятора 1, соответствующий ВП или НП, поступает в его выходной канал 5, соединенный с входным каналом 6 устройства-приставки 7, обеспечивающего адаптивные свойства регулятору 1.
Таким образом, элемент сравнения 3 совместно с пороговыми устройствами 4 образует традиционный двухпозиционный регулятор 1 с фиксированной зоной неоднозначности ΔY и фиксированными регулирующими сигналами, соответствующими крайним позициям - верхней (ВП) и нижней (НП), которые формируют выходной сигнал U регулятора при соответствующем выходе регулируемой технологической величины Y из зоны неоднозначности, то есть:

Внутри зоны неоднозначности удерживается сигнал соответствующей позиции исходя из условий:

Соотношения (1), (2) справедливы для двухпозиционного регулятора с "прямой" статической характеристикой, показанной на фиг.1, рассматриваемого ниже.
Аналогичные зависимости и аналогичное рассмотрение способа можно провести и для двухпозиционного регулятора с "обратной" статической характеристикой.
Сформированный в соответствии с (1), (2) выходной сигнал регулятора 1 U подают во входной канал 6 устройства-приставки 7, с которого он попадает на алгебраический сумматор 8, на котором из него вычитают опорный сигнал Ucp, равный среднему значению сигналов крайних верхней (ВП) и нижней (НП) позиций, то есть сигнал Ucp=(ВП+НП)/2. Выходной сигнал алгебраического сумматора U1 подают одновременно на первое и третье звенья насыщения 9 и 10. Первое звено насыщения 9 (первый нелинейный элемент НЭ1) является повторителем положительного входного сигнала U1 с ограничениями: нижним, равным нулю, и верхним В - не меньше, чем значение (ВП-НП)/2 регулятора 1. Третье звено насыщения 10 (третий нелинейный элемент НЭ3) является повторителем отрицательного входного сигнала U1 с ограничениями: верхним, равным нулю, и нижним Н - не больше, чем отрицательное значение (ВП-НП)/2. При таких значениях насыщений звеньев 9 и 10, если в регуляторе 1 установилось значение сигнала крайней верхней позиции ВП, то положительный сигнал U1, равный (ВП-НП)/2, проходит через звено 9 и подается одновременно на первый сумматор С1 (15) для суммирования с выходным сигналом первого звена памяти П1 (13) и на второе функциональное звено перенастройки ФЗП2 (12), а если установилось значение сигнала крайней нижней позиции НП, то отрицательный сигнал U1, равный - (ВП-НП)/2, проходит через звено 10 и подается одновременно на второй сумматор С2 (16) для суммирования с выходным сигналом второго звена памяти П2 (14) и на первое функциональное звено перенастройки ФЗП1 (11).
Функциональные звенья перенастройки ФЗП1 и ФЗП2, как и в патенте-аналоге №2220432, выбираются в зависимости от желаемого вида реализации адаптации позиций регулятора 1: дискретного или аналогового.
Так как при аналоговой реализации ФЗП в качестве него берется, например, интегрирующее звено с передаточной функцией

где Ти - время интегрирования - параметр настройки ФЗП, р - оператор Лапласа, реализующее линейное изменение сигнала адаптивной верхней (g1) или нижней (g2) позиции в соответствии с уравнением

или апериодическое первого порядка с

где Ta - постоянная времени звена - также параметр настройки ФЗП, реализующего экспоненциальное изменение сигнала адаптивной верхней (g1) или нижней (g2) позиции в соответствии с уравнением
где в (4), (6) ν - время нахождения (выбега) регулируемой технологической величины вне (из) зоны неоднозначности ΔY, а Δ=±(ВП-НП)/2 - значение скачкообразного сигнала, поступающего на вход ФЗП1 (со знаком минус) - Δ1 и на вход ФЗП2 (со знаком плюс) - Δ2 соответственно со звеньев насыщения 10 и 9.
При дискретном выборе реализации адаптации сигналов позиций сигнал g1 на выходе ФЗП1 и сигнал g2 на выходе ФЗП2 изменяются скачком на какую-то величину Δg.
В случае реализации ФЗП1, 2 в виде апериодического звена (5) последовательно с ними включается звено памяти, соответственно первое П1 (13) и второе П2 (14) для запоминания сигналов соответственно g1 и g2 на выходе ФЗП1 и ФЗП2 в момент переключения входного сигнала Δ1 или Δ2 на соответствующее ФЗП на нуль.
Такое звено памяти удерживает значение сигнала ФЗП, соответствующего значению вновь сформированного в нем сигнала, для соответствующего сигнала адаптивной верхней ВПi (на первом сумматоре С1) и нижней НПi (на втором сумматоре С2) позиций. При этом на первом сумматоре С1 от сигнала (ВП-НП)/2 будет вычитаться соответствующее значение сигнала g1, а на втором сумматоре С2 к сигналу - (ВП-НП)/2 будет прибавляться соответствующее значение сигнала g2.
При реализации ФЗП 1, 2 в виде интегрирующего звена (3) необходимость в звеньях памяти П1 (13) и П2 (14) отпадает, так как при переключении с НП на ВП сигнал Δ1, идущий на ФЗП1, становится нулевым и, соответственно, в соответствии с (4) сигнал g1 перестает изменяться, а при переключении с ВП на НП становится нулевым сигнал Δ2, идущий на ФЗП2, и, соответственно, не изменяется сигнал g2.
То же происходит и при дискретных изменениях сигналов в ФЗП 1, 2, при которых происходит запоминание сигнала g1 (соответственно, g2) в силу конструктивного выполнения ФЗП.
Сигнал, сформированный после первого сумматора С1 (15), подают на второе звено насыщения 17 (второй нелинейный элементы НЭ2), которое является повторителем положительного сигнала верхней адаптивной позиции ВПi с ограничениями: верхним В - не меньше, чем значение сигнала (ВП-НП)/2 регулятора 1, и нижним Н1, равным значению сигнала N, эквивалентного нагрузке  , с которой работает объект, за вычетом сигнала Ucp и увеличением на дополнительный сигнал δ, например, равный 0,05 N.
, с которой работает объект, за вычетом сигнала Ucp и увеличением на дополнительный сигнал δ, например, равный 0,05 N.
Сигнал с НЭ2 (17) приходит через контакт K1 (19) на выходной сумматор С3 (21), где суммируется с сигналом Ucp и подается в выходной канал 22 устройства-приставки 7 и далее на технологический объект управления (ТОУ). При этом этот сигнал будет равен ВПi+Ucp с учетом ограничений звена 17. Верхнее значение сигнала в выходном канале 22 может достигать значения сигнала крайней верхней позиции регулятора 1, то есть ВП, а нижнее
N+δ-Uср+Uср=N+δ,
то есть превышать значение сигнала N, соответствующего нагрузке  , на величину сигнала δ.
, на величину сигнала δ.
При этом контакт К1 (19) замкнут одновременно с включением крайней верхней позиции ВП регулятора 1.
Сигнал, сформированный после второго сумматора С2 (16), подают на четвертое звено насыщения 18 (четвертый нелинейный элемент НЭ4), которое является повторителем отрицательного сигнала нижней адаптивной позиции НПi с ограничениями: нижним Н - не больше, чем отрицательное значение сигнала (ВП-НП)/2 регулятора 1, и верхним В1, равным значению сигнала N, эквивалентного нагрузке , с которой работает объект, за вычетом сигнала Ucp и дополнительного сигнала δ.
Сигнал с НЭ4 (18) проходит через контакт К2 (20), который замкнут одновременно с включением крайней нижней позиции НП регулятора 1, на выходной сумматор С3 (21), где суммируется с сигналом Ucp и подается далее в выходной канал 22 устройства-приставки 7 и далее на технологический объект управления (ТОУ). При этом сигнал будет равен НПi+Ucp с учетом ограничений звена 18. Нижнее значение сигнала в выходном канале 22 может достигать значения сигнала крайней нижней позиции регулятора 1, то есть НП, а верхнее
N-δ-Uср+Uср=N-δ,
то есть быть меньше на величину сигнала δ значения сигнала N, соответствующего нагрузке .
Сигнал N, соответствующий нагрузке , с которой работает объект, может быть определен, например, путем идентификации нагрузки в процессе эксплуатации системы позиционного регулирования по характеру переходного процесса в системе. Примеры такой идентификации изложены, например, в работах:
1. Войтенко В.В., Магергут В.З., Вент Д.П. Определение параметров объектов по характеристикам работы их позиционных систем регулирования. Сб. трудов XV Междун. научн. конф. "Математические методы в технике и технологиях" (ММТТ-15). Т.9. Тамбов, Изд-во ТГТУ, 2002. С.175-177.
2. Соболев А.В., Магергут В.З. К определению характеристик систем с адаптивным позиционным регулятором при возникновении колебаний. Сб. трудов XIX Междун. научн. конф. "Математические методы в технике и технологиях" (ММТТ-19). Т.2. Воронеж, Изд-во ВГТА, 2006. С.123-125.
3. Кирин Ю.П., Затонский А.В., Беккер В.Ф., Бильфельд Н.В. Опыт идентификации объектов по автоколебательным режимам позиционных систем регулирования. Сб. трудов XVI Междун. научн. конф. "Математические методы в технике и технологиях" (ММТТ-16). Т. 6. Ростов-на-Дону, Изд-во РГАСХМ, 2003. С.131-134.
4. Кирин Ю.П., Затонский А.В., Беккер В.Ф., Бильфельд Н.В. Адаптивное позиционное регулирование с идентификатором. Сб. трудов XVI Междун. научн. конф. "Математические методы в технике и технологиях" (ММТТ-16). Т.2. СПб, Изд-во СПГТИ (ТУ), 2003. С.85-88.
5. Наладка автоматических систем и устройств управления технологическими процессами. Справочное пособие. Под ред. А.С.Клюева. М.: Энергия, 1987. С.352-373.
Блок-схема системы адаптивного двухпозиционного регулирования с идентификатором нагрузки технологического объекта управления (ТОУ) показана на фиг.2. На схеме цифрами обозначены: 1 - традиционный двухпозиционный регулятор с фиксированной зоной неоднозначности и фиксированными позициями, 5 - выходной канал устройства 1, 6 - входной канал устройства-приставки 7, придающего регулятору 1 новое свойство - свойство адаптации его позиций к нагрузке , с которой работает технологический объект управления (ТОУ) 25; 22 - выходной канал устройства-приставки 7; 23 и 24 - входные каналы задания зоны возврата (реадаптации) регулятору 1; 26 - идентификатор нагрузки объекта (ИНО). Устройства 1, 5, 6 и 7, а также 22, 23 и 24 на фиг.2 соответствуют устройствам, обозначенным этими же цифрами на фиг.1.
Идентификатор 26 нагрузки ТОУ 25 работает по сигналам U2 и Y в соответствии с одним из алгоритмов, описанным в литературе [1-5] на стр.8 описания, и выдает сигнал  , соответствующий нагрузке , с которой работает ТОУ 25, что показано на фиг.2 знаком ~. Значение сигнала N в звеньях типа насыщения - нелинейных элементах, соответственно втором НЭ2 - 17 и четвертом НЭ4 - 18, устанавливается равным сигналу , то есть N=~.
, соответствующий нагрузке , с которой работает ТОУ 25, что показано на фиг.2 знаком ~. Значение сигнала N в звеньях типа насыщения - нелинейных элементах, соответственно втором НЭ2 - 17 и четвертом НЭ4 - 18, устанавливается равным сигналу , то есть N=~.
При отсутствии идентификатора (ИНО) нагрузки объекта 26 значение сигнала N в устройстве-приставке 7 задается вручную исходя из примерного знания нагрузки ТОУ, то есть в этом случае
N≈~
Например, значение сигнала N может быть задано исходя из выражения:
 ,
,
где Коб - коэффициент передачи технологического объекта управления.
При этом в системе без ИНО 26 имеет место тот же недостаток, что и в системе с неполным притоком и оттоком (см. стр.2 описания), а именно, если сигнал , соответствующий нагрузке , выходит за пределы сигналов N-δ или N+δ, то есть если <N-δ или >N+δ, то регулируемая технологическая величина Y становится неуправляемой и выходит за пределы допустимых отклонений.
В этом случае предусматривается режим реадаптации системы к исходному состоянию и повтор процедуры адаптации позиций регулятора, описанный выше, но с предварительной коррекцией значения сигнала N в элементах 17 и 18 фиг.1 по результатам выбега регулируемой величины Y за пределы допустимых отклонений.
Так, если регулируемая величина Y отклонилась за допустимые пределы от значения Y2 при работающей текущей верхней позиции ВПi, в том числе при ВПi=N+δ, то есть превысила, например, значение  , то это означает, что сигнал , соответствующий нагрузке , превысил значение сигнала N+δ в устройстве-приставке 7 и значение сигнала N в 7 необходимо увеличить, то есть сделать
, то это означает, что сигнал , соответствующий нагрузке , превысил значение сигнала N+δ в устройстве-приставке 7 и значение сигнала N в 7 необходимо увеличить, то есть сделать  При такой ситуации достаточно реадаптировать лишь ВПi до значения ВП.
При такой ситуации достаточно реадаптировать лишь ВПi до значения ВП.
Если же регулируемая величина Y отклонилась за допустимые пределы от значения Y1 при работающей текущей нижней позиции НПi, в том числе при НПi=N-δ, то есть стала, например, меньше Y1<Y1, то это означает, что сигнал  соответствующий нагрузке
соответствующий нагрузке  стал ниже значения сигнала N-δ в устройстве-приставке 7 и значение сигнала N в 7 необходимо уменьшить, то есть сделать
стал ниже значения сигнала N-δ в устройстве-приставке 7 и значение сигнала N в 7 необходимо уменьшить, то есть сделать  При такой ситуации достаточно реадаптировать лишь НПi до значения НП.
При такой ситуации достаточно реадаптировать лишь НПi до значения НП.
Таким образом, предлагаемый способ реализации двухпозиционного регулятора позволяет повторить работу адаптивного двухпозиционного регулятора, реализованного в соответствии со способом прототипа, однако имеет большие функциональные возможности (помимо дискретной адаптации возможна и аналоговая) и проще реализуется, так как имеет меньшее число контактных и пороговых элементов, что повышает надежность работы регулятора по предлагаемому способу. Кроме того, способ реализуется при помощи устройства-приставки 7 к традиционным двухпозиционным регуляторам, делая их адаптивными. Это существенно проще, чем создавать новый адаптивный регулятор по способу-прототипу, а кроме того, требует минимальной переделки существующих двухпозиционных АСР для их преобразования в адаптивные путем подключения устройства-приставки 7, реализованной по предлагаемому способу.
Наконец, если в способе использовать идентификатор нагрузки объекта (ИНО) 26, то при кажущемся усложнении способа отпадает необходимость в реадаптации сигналов позиций, что в целом упрощает способ в сравнении со способом-прототипом.
Отметим также, что в случае двухпозиционного регулятора 1 с симметричной статической характеристикой, то есть когда сигнал НП=-ВП, a Ucp=0, необходимость в алгебраическом сумматоре АС (8) и выходном сумматоре С3 (21) отпадает, что упрощает устройство-приставку 7.
В настоящее время разрабатываются различные варианты устройства-приставки, работающей в соответствии с предлагаемым способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕАЛИЗАЦИИ ТРЕХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2001 |
|
RU2220432C2 |
| АДАПТИВНАЯ ПРИСТАВКА К ДВУХПОЗИЦИОННОМУ РЕГУЛЯТОРУ | 2010 |
|
RU2424545C1 |
| СИСТЕМА АДАПТИВНОГО ДВУХПОЗИЦИОННОГО УПРАВЛЕНИЯ | 2010 |
|
RU2430398C1 |
| СПОСОБ АДАПТИВНОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2498386C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2158435C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2129726C1 |
| СПОСОБ АДАПТИВНОГО ТРЕХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2474856C1 |
| НЕЧЕТКИЙ АДАПТИВНЫЙ ПОЗИЦИОННЫЙ СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ С ДИСКРЕТНЫМИ ИСПОЛНИТЕЛЬНЫМИ УСТРОЙСТВАМИ | 2013 |
|
RU2514127C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2155361C2 |
| АДАПТИВНЫЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 2010 |
|
RU2408913C1 |
Изобретение относится к автоматическому управлению, а именно к реализации двухпозиционных регуляторов с адаптивными позициями в виде приставки, подключаемой к выходному каналу традиционного двухпозиционного регулятора. В отличие от известных способов создания адаптивных двухпозиционных регуляторов с контактным подключением функционального звена перенастройки позиций предлагается бесконтактный вариант подключения этого звена. Технический результат - повышается надежность работы приставки и упрощается преобразование традиционного двухпозиционного регулятора с фиксированными позициями в адаптивный, при этом достигается улучшение качества регулирования. Изобретение может быть использовано как при автоматизации промышленных объектов, так и объектов бытовой техники, особенно тех, в которых для автоматического регулирования тех или иных технологических величин используются традиционные двухпозиционные регуляторы. Подключение к ним предлагаемой приставки превращает регуляторы в адаптивные, то есть в регуляторы, позиции которых подстраиваются под нагрузку, с которой работает объект. При этом происходит существенное снижение амплитуды колебаний технологической величины и снижение частоты этих колебаний. 4 з.п. ф-лы, 2 ил.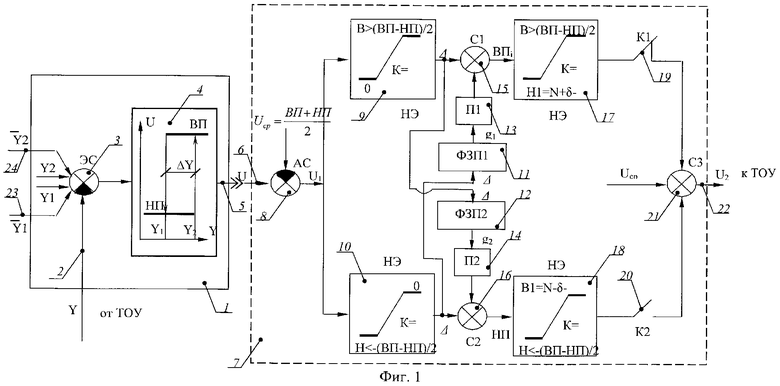
1. Способ автоматического двухпозиционного регулирования технологической величины Y, основанный на задании фиксированной зоны неоднозначности ΔY=Y2-Y1 и фиксированных регулирующих сигналов, соответствующих крайним - верхней (ВП) и нижней (НП) позициям регулятора, причем регулирующий сигнал U регулятора, соответствующий крайней верхней (ВП) позиции, появляется на его выходе при условии Y≥Y2 и удерживается на нем до появления условия Y≤Y1, при котором на выходе регулятора появляется значение регулирующего сигнала U, соответствующего крайней нижней (НП) позиции, которое удерживается на нем до появления условия Y≥Y2, отличающийся тем, что выходной сигнал регулятора U подают во входной канал устройства-приставки, с которого он попадает на алгебраический сумматор, на котором из него вычитают опорный сигнал Ucp, равный среднему значению сигналов крайних позиций регулятора, выходной сигнал алгебраического сумматора подают одновременно на первое и третье звенья насыщения, одно из насыщений которых равно нулевому сигналу, а другое - сигналу не меньшего среднего значения разницы сигналов верхней и нижней крайних позиций регулятора со знаком "плюс" на первом звене насыщения и сигналу не большего этого среднего значения разницы со знаком "минус" на третьем; сигнал с первого звена насыщения подают одновременно на первый сумматор для суммирования с выходным сигналом первого звена памяти и на второе функциональное звено перенастройки регулирующего сигнала адаптивной нижней крайней позиции устройства-приставки с последовательно соединенным с ним вторым звеном памяти сигнала этого второго функционального звена перенастройки, запоминающегося в моменты переключения входного сигнала последнего с положительного значения на нулевой, а сигнал с третьего звена насыщения подают одновременно на второй сумматор для суммирования с выходным сигналом второго звена памяти и на первое функциональное звено перенастройки регулирующего сигнала адаптивной верхней крайней позиции устройства-приставки с последовательно соединенным с ним первым звеном памяти сигнала этого первого функционального звена перенастройки, запоминающегося в моменты переключения входного сигнала последнего с отрицательного значения на нулевой; выходной сигнал первого сумматора подают на второе звено насыщения с верхним сигналом насыщения, не меньшим положительного значения средней разницы сигналов верхней и нижней крайних позиций регулятора, и с нижним - равным значению сигнала, соответствующего нагрузке, с которой работает технологический объект управления, увеличенному на дополнительный сигнал δ, за минусом опорного сигнала; выходной сигнал второго звена насыщения через контакт, замыкающийся одновременно со срабатыванием регулятора на включение верхней крайней позиции и размыкающийся при срабатывании на включение нижней крайней позиции регулятора, подается на выходной сумматор, где суммируется с опорным сигналом, и подается после суммирования с выходного сумматора на технологический объект управления; выходной сигнал второго сумматора подают на четвертое звено насыщения с нижним сигналом насыщения, не большего отрицательного значения средней разницы сигналов верхней и нижней крайних позиций регулятора, и с верхним - равным значению сигнала, соответствующего нагрузке, с которой работает технологический объект управления, уменьшенному на дополнительный сигнал δ и на опорный сигнал; выходной сигнал четвертого звена насыщения через контакт, замыкающийся одновременно со срабатыванием регулятора на включение нижней крайней позиции и размыкающийся при срабатывании на включение верхней крайней позиции регулятора, подается на выходной сумматор, где суммируется с опорным сигналом, и подается после суммирования с выходного сумматора на технологический объект управления.
2. Способ по п.1, отличающийся тем, что в регулятор вводят дополнительную зону - зону возврата (реадаптации)  , большую чем зона неоднозначности ΔY=Y2-Y1 и включающую последнюю внутри себя, то есть
, большую чем зона неоднозначности ΔY=Y2-Y1 и включающую последнюю внутри себя, то есть  , a
, a  , и в случае выбега технологической величины Y за верхнее значение
, и в случае выбега технологической величины Y за верхнее значение  этой зоны, сигнал верхней адаптивной позиции устройства-приставки возвращают (реадаптируют) на соответствующий сигнал верхней позиции (ВП) регулятора и одновременно увеличивают значение сигнала, соответствующего значению нагрузки, с которой работает технологический объект управления, на втором и четвертом звеньях насыщения устройства-приставки, а в случае выбега за нижнее значение
этой зоны, сигнал верхней адаптивной позиции устройства-приставки возвращают (реадаптируют) на соответствующий сигнал верхней позиции (ВП) регулятора и одновременно увеличивают значение сигнала, соответствующего значению нагрузки, с которой работает технологический объект управления, на втором и четвертом звеньях насыщения устройства-приставки, а в случае выбега за нижнее значение  этой зоны, сигнал нижней адаптивной позиции устройства-приставки возвращают (реадаптируют) на соответствующий сигнал нижней позиции (НП) регулятора и одновременно уменьшают значение сигнала, соответствующего значению нагрузки, с которой работает технологический объект управления, на втором и четвертом звеньях насыщения устройства-приставки, после чего возобновляют процесс адаптации позиций устройства-приставки.
этой зоны, сигнал нижней адаптивной позиции устройства-приставки возвращают (реадаптируют) на соответствующий сигнал нижней позиции (НП) регулятора и одновременно уменьшают значение сигнала, соответствующего значению нагрузки, с которой работает технологический объект управления, на втором и четвертом звеньях насыщения устройства-приставки, после чего возобновляют процесс адаптации позиций устройства-приставки.
3. Способ по п.1, отличающийся тем, что в случае установки на технологическом объекте управления идентификатора нагрузки объекта, сигнал, соответствующий нагрузке, с которой работает объект, на втором и четвертом звеньях насыщения задают по показаниям идентификатора нагрузки объекта, а зону реадаптации регулятора по п.2 исключают.
4. Способ по п.1, отличающийся тем, что в случае использования в качестве первого и второго функционального звена перенастройки интегрирующего звена или звена с дискретным изменением сигнала адаптивных крайних позиций устройства-приставки, запоминание сигналов функциональных звеньев перенастройки, в моменты переключения их входных сигналов соответственно с положительного или отрицательного значения сигнала среднего значения разницы сигналов верхней и нижней крайних позиций регулятора на нулевой, не производится в силу постоянства их выходных сигналов с момента переключения.
5. Способ по п.1, отличающийся тем, что, в случае симметричной статической характеристики регулятора, суммирование на алгебраическом и выходном сумматорах с опорным сигналом не производится в силу нулевого значения последнего.
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2129726C1 |
| СПОСОБ РЕАЛИЗАЦИИ ТРЕХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2001 |
|
RU2220432C2 |
| АХРОМАТИЧЕСКИЙ МИКРООБЪЕКТИВ | 1999 |
|
RU2158432C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2155361C2 |
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2144690C1 |
| Способ формирования опорной культи после эвисцерации при субатрофии глазного яблока | 1985 |
|
SU1388027A1 |
| US 3546559 A, 08.12.1970. | |||

