Область техники, к которой относится изобретение
Изобретение относится к области управления непрерывными технологическими процессами, в частности сложными инерционными объектами, с помощью вычислительных технических средств и может быть использовано в химической, нефтехимической и других отраслях промышленности.
Уровень техники
Известен способ каскадного автоматического регулирования, в котором осуществляют стабилизацию вспомогательного и основного параметров с помощью одноконтурных систем регулирования, при нарушении вспомогательным параметром верхнего или нижнего допустимого значения подают с выхода регулятора внутреннего контура на исполнительное устройство управляющее воздействие релейного типа и одновременно отключают управляющее воздействие астатического регулятора внешнего контура, формируют и сохраняют интегральную составляющую этого регулятора на уровне значения средней позиции выходного сигнала регулятора внутреннего контура (патент на изобретение №2127895, 20.03.1999, G05B 13/02).
Известный способ реализует фактически «развязанное» регулирование каскада с поочередным управлением по вспомогательной и основной переменной. Для сложных объектов (а именно для таких объектов используют каскадное регулирование) между вспомогательным и основным параметром существует не жесткая связь, а плавающая (из-за различных возмущений) зависимость. Поэтому задать «правильные» допустимые пределы вспомогательного параметра и значение интегральной составляющей основного параметра, как это предусмотрено способом, проблематично. Кроме того, используемая схема регулирования вспомогательного параметра приводит к его значительной статической ошибке, а статическая ошибка вспомогательного параметра не позволяет эффективно устранять статическую ошибку основного параметра. Указанные недостатки известного способа не позволяют обеспечить высокое качество регулирования сложных инерционных объектов.
Известен также способ цифрового управления инерционным объектом путем формирования по сигналу ошибки регулирования Ei пропорциональной Pi=Kn*Ei и интегральной Ri=Ri-1+Ei*h0/Tj составляющих управляющего воздействия, корректировки с дискретностью h1 коэффициента пропорциональной составляющей по формуле
 ,
,
изменения с дискретностью h2 постоянной времени интегральной составляющей по формуле

и прибавления к управляющему воздействию с дискретностью h1 импульсной компенсирующей составляющей с шириной импульса, определяемой пропорционально производной задающего сигнала Y по формуле Sn=D*(Yn-Yn-1)/Uимп (патент на изобретение №2549149, 15.04.2013, G05B 11/00 - прототип).
Недостатком известного способа является невысокое качество регулирования сложных инерционных объектов при использовании в каскадных схемах, так как не учитывает особенности каскадного регулирования.
Раскрытие изобретения
Цель изобретения - повышение качества каскадного регулирования сложных инерционных объектов.
Указанная цель достигается тем, что в отличие от известного технического решения, в предлагаемом способе каскадного цифрового регулирования дополнительно корректируют с дискретностью h1 коэффициент пропорциональной составляющей внутреннего контура в зависимости от значения ошибки Е1 по формуле
с настроечным коэффициентом F, изменяют постоянную времени интегральной составляющей внешнего контура в зависимости от скользящего на задаваемом интервале h2 среднего значения модуля ошибки Е1 внутреннего контура по формуле

Описание чертежей
Реализация и особенности предлагаемого способа иллюстрируются рисунками.
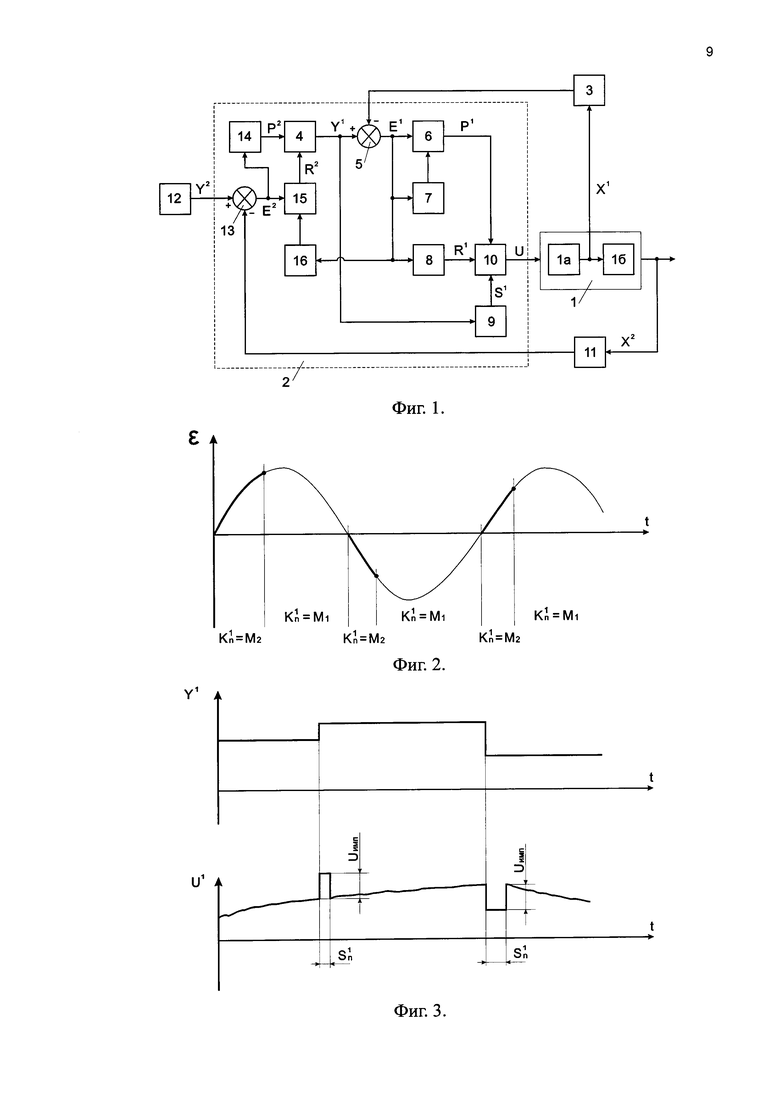
Фиг. 1. Схема каскадной системы регулирования.
1 - Объект регулирования
2 - Управляющий контроллер
3 - Датчик промежуточной переменной
4 - Сумматор внешнего контура
5 - Блок сравнения внутреннего контура
6 - Блок умножения внутреннего контура
7 - Блок коррекции пропорциональной составляющей внутреннего контура
8 - Интегрирующий блок внутреннего контура
9 - Блок импульсной компенсации внутреннего контура
10 - Сумматор внутреннего контура
11 - Датчик выходной переменной
12 - Задатчик
13 - Блок сравнения внешнего контура
14 - Блок умножения внешнего контура
15 - Интегрирующий блок внешнего контура
16 - Блок коррекции интегральной составляющей внешнего контура
Фиг. 2. Корректировка пропорциональной составляющей внутреннего контура.
Фиг. 3. Импульсная компенсация.
Осуществление изобретения
Схема системы, реализующей предлагаемый способ, показана на фиг. 1. Объект регулирования 1 представляет собой сложную динамическую структуру, в которой можно выделить динамическую часть 1а с выходной промежуточной переменной X1. Управляющий контроллер 2 реализует все функциональные блоки системы.
Система работает следующим образом.
Контроллер 2 осуществляет цифровое, с интервалом дискретности h0, регулирование промежуточной переменной X1 i (внутренний контур каскада) по замеру от датчика 3 и получаемому заданию Y1 i от сумматора 4. Ошибка регулирования E1 i рассчитывается блоком 5:
Ε1 i=Y1 i-X1 i,
где i - номер цикла цифрового регулирования с интервалом дискретности h0.
С помощью блока 6 определяется пропорциональная составляющая P1 i управляющего воздействия U1 внутреннего контура:
P1 i=K1 n*E1 i,
где K1 n - настроечный коэффициент, корректируемый с помощью блока 7 в n-м цикле с интервалом дискретности h1 (h1≥h0):

причем настраиваемые константы соответствуют условию M1<М2 (см. фиг. 2). Коэффициент F определяет точку переключения. С помощью блока 8 рассчитывается интегральная составляющая R1 управляющего воздействия внутреннего контура:
R1 i=R1 i-1+E1 i*h0/T1,
где Т1 - настроечная постоянная времени интегрирования. С помощью блока 9 выдается в n-м цикле с интервалом дискретности h1 компенсирующая составляющая управляющего воздействия U1 в виде импульсов следующей длительности (см. фиг. 3):
S1 n=D*(Y1 n-Y1 n-1)/Uимп,
где Uимп - уровень импульса как допустимое значение компенсирующего воздействия;
D - настроечный коэффициент, зависящий от динамических свойств объекта 1.
Управляющее воздействие внутреннего контура определяется с помощью блока 10:
U1 i=P1 i+R1 i+S1 n.
Контроллер 2 осуществляет цифровое, с интервалом дискретности h0, регулирование выходной переменной X2 i (внешний контур каскада) по замеру от датчика 11 и получаемому заданию Y2 i от задатчика 12. Ошибка регулирования рассчитывается блоком 13:
E2 i=Y2 i-X2 i.
С помощью блока 14 определяется пропорциональная составляющая управляющего воздействия U2 внешнего контура:
P2 i=K2*E2 i.
С помощью блока 15 рассчитывается интегральная составляющая R2 i управляющего воздействия внешнего контура:
R2 i=R2 i-1+E2 i*h0/T2 i,
где T2 i - постоянная времени интегрирования, корректируемая с помощью блока 16 в i-м цикле в зависимости от скользящего на интервале h2 среднего значения модуля ошибки Е1 внутреннего контура по формуле:

причем настраиваемые константы соответствуют условиям: N1<N2, L=h2/h0 - целое число.
Управляющее воздействие внешнего контура, являющееся заданием внутреннему контуру, определяется с помощью сумматора 4:
Y1 i=P2 i+R2 i.
Для эффективной работы каскадной схемы регулирования важно, чтобы быстродействие внутреннего контура было по возможности большим при ограниченной колебательности. Увеличение пропорциональной составляющей при возрастании до определенного уровня абсолютного значения ошибки позволяет уменьшить перерегулирования, снизить колебательность внутреннего контура. Импульсная компенсация изменений задающего сигнала внутреннего контура существенно повышает его быстродействие.
Для внешнего контура требуется реализация астатического регулирования, согласуемого с работой внутреннего контура во избежание взаимных раскачиваний. С этой целью корректируется постоянная времени интегральной составляющей внешнего контура в зависимости от скользящего на определенном интервале среднего значения модуля ошибки регулирования внутреннего контура. Увеличение интегральной составляющей внешнего контура при достижении малых значений ошибки внутреннего контура улучшает астатизм системы, снижает время регулирования.
Предлагаемое в способе формирование цифровых управляющих воздействий позволяет существенно повысить качественные характеристики каскадного регулирования сложных инерционных объектов, что было подтверждено проведенными испытаниями на различных промышленных объектах (пароперегревательная печь, теплообменник для котлов и др.).
Для реализации способа может использоваться, например, управляющий контроллер БАЗИС®-21.2ЦУ или другой из серии БАЗИС® производства ЗАО «Экоресурс». Внедрение предлагаемого способа в серийно выпускаемых контроллерах серии БАЗИС® намечено на 2015 год.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦИФРОВОГО УПРАВЛЕНИЯ | 2013 |
|
RU2549149C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ С РЕВЕРСИВНЫМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ | 2014 |
|
RU2568523C1 |
| СПОСОБ КАСКАДНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2127895C1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ ПИД-РЕГУЛИРОВАНИЯ | 2014 |
|
RU2568386C2 |
| Система цифрового управления | 1981 |
|
SU970319A1 |
| Устройство управления одноконтурной зависимой системой отопления | 2023 |
|
RU2825177C1 |
| Система управления | 1977 |
|
SU705417A1 |
| ЦИФРОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ РАСХОДА ЖИДКОСТИ С КОРРЕКЦИЕЙ ПО УРОВНЮ В ЕМКОСТИ-СБОРНИКЕ | 2007 |
|
RU2348960C1 |
| Система управления объекта с запаздыванием | 1984 |
|
SU1254435A1 |
| Способ управления процессом разделения изопрен-изоамиленовой фракции | 1985 |
|
SU1276349A1 |
Изобретение относится к области управления непрерывными технологическими процессами, в частности инерционными объектами, с помощью вычислительных технических средств и может быть использовано в химической, нефтехимической и других отраслях промышленности. Способ заключается в корректировке интегральной составляющей внешнего контура в зависимости от скользящего среднего значения модуля ошибки внутреннего контура, корректировке пропорциональной составляющей в зависимости от направления изменения ошибки, выдаче компенсирующего воздействия на изменения задания внутреннего контура, использовании различных интервалов дискретности для составляющих управляющего воздействия внутреннего и внешнего контуров каскада. В результате повышается качество каскадного регулирования сложными инерционными объектами. 3 ил.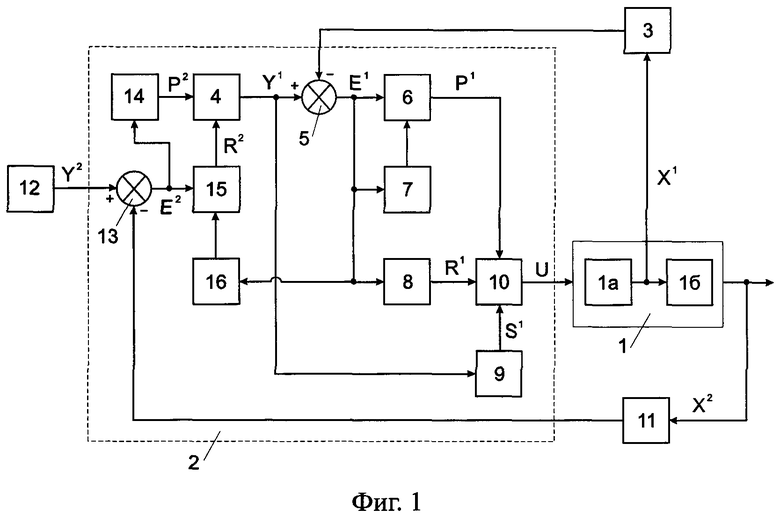
Способ каскадного цифрового регулирования путем формирования для внутреннего и внешнего контуров соответственно по сигналу ошибки регулирования Е1, Е2, пропорциональной  ,
,  и интегральной
и интегральной  ,
,  составляющих управляющего воздействия, прибавления к управляющему воздействию внутреннего контура с дискретностью h1 импульсной компенсирующей составляющей с шириной импульса, определяемой пропорционально производной задающего сигнала Y1 по формуле
составляющих управляющего воздействия, прибавления к управляющему воздействию внутреннего контура с дискретностью h1 импульсной компенсирующей составляющей с шириной импульса, определяемой пропорционально производной задающего сигнала Y1 по формуле  с настроечным коэффициентом D и допустимым уровнем импульса Uимп, отличающийся тем, что дополнительно корректируют с дискретностью h1 коэффициент пропорциональной составляющей внутреннего контура в зависимости от значения ошибки Е1 по формуле
с настроечным коэффициентом D и допустимым уровнем импульса Uимп, отличающийся тем, что дополнительно корректируют с дискретностью h1 коэффициент пропорциональной составляющей внутреннего контура в зависимости от значения ошибки Е1 по формуле
с настроечным коэффициентом F, изменяют постоянную времени интегральной составляющей внешнего контура в зависимости от скользящего на задаваемом интервале h2 среднего значения модуля ошибки Е1 внутреннего контура по формуле
 ,
,
где i - номер цикла цифрового регулирования с интервалом дискретности h0,
n - номер цикла цифрового регулирования с интервалом дискретности h1 (h1 > h0).
| СПОСОБ ЦИФРОВОГО УПРАВЛЕНИЯ | 2013 |
|
RU2549149C2 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБЪЕКТОМ | 1989 |
|
RU2017196C1 |
| US 4430698 A, 07.02.1984. | |||

