Изобретение относится к способам автоматизации, а именно к способу адаптивного трехпозиционного регулирования. Оно может быть использовано при автоматизации работы нагревательных печей, экструдеров и литьевых машин, реакторов, бытовых и промышленных холодильников и иных объектов для позиционного регулирования в них одной технологической величины (температуры, давления и т.п.) путем подачи позиционных управляющих воздействий типа «включено»/«выключено».
Известен способ трехпозиционного регулирования с фиксированными позициями регулятора (см., например, А.А.Кампе-Немм «Автоматическое двухпозиционное регулирование». М.: Наука, 1967, - 160 с.), который не обеспечивает достаточно качественного регулирования.
Улучшения качества удается добиться путем создания позиционных систем регулирования с использованием регуляторов с адаптирующейся к нагрузке объекта средней позицией регулятора, изменяющейся в сторону работающей крайней позиции аналоговым (см. авт. св. СССР №675399, кл. G05B 11/56, 1979) или дискретным (см. авт. св. СССР №1554628, кл. G05B 11/56, 1989 или авт. св. СССР №1802606, кл. G05B 11/18, 1992) способом.
Характерной особенностью данного класса систем является адаптация средней позиции их регулятора к значениям крайних, причем при дискретном способе реализации подстройки средней позиции к крайней используется либо реверсивный шаговый двигатель (авт. св. №1554628), либо реверсивный счетчик и преобразователь результата счета (кода счетчика) в дискретный сигнал (авт. св. №1802606) на базе цифроаналогового преобразователя (ЦАП).
Иначе говоря, в данном классе адаптивных позиционных систем регулирования мощность, подводимая к объекту регулирования при нахождении регулируемой величины в зоне нечувствительности регулятора, т.е. при работе регулятора на средней позиции, определяется уровнем сигнала этой позиции.
Общим недостатком такого класса адаптивных позиционных систем регулирования является сложность использования сигнала средней позиции, находящегося между значениями сигналов крайних позиций, в специфическом исполнительном устройстве объекта регулирования, например электрическом нагревателе тепловой печи или двигателе компрессорного холодильника, из-за сложности сопряжения регулятора, работающего на средней позиции с ними, так как данные исполнительные устройства удобнее всего использовать в режимах «включено»/«выключено».
Улучшить показатели качества можно, применяя способы регулирования, используемые в изобретениях по патентам РФ №2047210, кл. G05B 11/18, 1995 и №2408913, МПК G05B 11/18, 2010, которые были выбраны как патенты-прототипы. В них используется сигнал средней позиции, равный по уровню сигналам только крайних позиций, который подается импульсами, а адаптация средней позиции трехпозиционного регулятора обеспечивается в первом случае изменением скважности этих сигналов при постоянном периоде их следования, а во втором случае также изменением скважности, но путем изменения периода следования этих импульсов.
Недостатком этих способов является фиксированность одного из параметров подаваемых импульсов: либо периода, либо длительности импульсов, что приводит к необходимости расчета и правильного выбора этого параметра для соответствующих изменений нагрузки на объект управления. Также неизменность выбранного параметра в ходе функционировании объекта при больших, по сравнению с расчетными, изменениях нагрузки может приводить к вырождению рассматриваемых способов в обычный неадаптивный двухпозиционный с зоной неоднозначности способ регулирования. Кроме того, реализация этих способов предусматривает адаптацию изменяемых параметров импульсов только с некоторым шагом, что приводит к необходимости выбора шага и связанными с этим проблемами: маленький шаг ведет к большому времени адаптации, а при использовании большого шага адаптированное к нагрузке значение параметра импульса получается более грубо и менее точно.
Предложен способ, в котором используется сигнал средней позиции, равный по уровню сигналам только крайних позиций, который подается ШИМ-импульсами, имеющими переменную длительность и паузу. Таким образом, в отличие от патентов-прототипов устраняется недостаток, связанный с фиксированностью одного из параметров импульсов: происходит адаптация как длительности импульсов, так и периода следования импульсов. Кроме этого, устраняется недостаток, связанный с дискретным шагом изменения параметров импульсов в патентах-прототипах.
Иными словами, если регулируемая величина выходит за пределы зоны нечувствительности регулятора, то для ее возврата в зону применяется одно из управляющих воздействий крайних позиций. С другой стороны, при нахождении регулируемой величины в пределах зоны нечувствительности регулирование осуществляется ШИМ-импульсами. При этом адаптация длительности импульса в текущем периоде осуществляется на основании зависимости достигнутого минимального значения регулируемой величины (или максимального, в случае, если подаваемый импульс приводит к возрастанию регулируемой величины) и продолжительности импульса в предыдущем периоде; адаптация периода импульсов производится путем изменения паузы между ними, расчет которой в текущем периоде производится аналогично на основании зависимости достигнутого максимального значения регулируемой величины (или минимального, в случае, если отсутствие импульса приводит к убыванию регулируемой величины) и продолжительности паузы в предыдущем периоде.
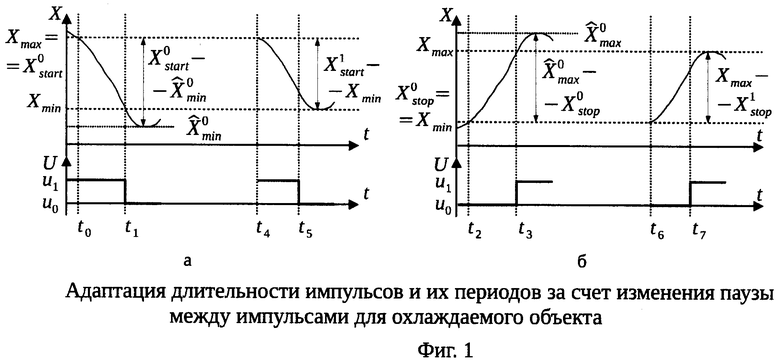
Рассмотрим суть способа на примере охлаждаемого объекта, в котором регулирование величины X, например температуры, осуществляется управляющими воздействиями u0 и u1, причем u1 соответствует отбору энергии за счет внутреннего управляющего воздействия, а u0 - притоку энергии за счет внешней среды. В качестве такого объекта можно рассматривать холодильник, для которого X - температура внутри холодильной камеры, u1 - сигнал включения компрессора, u0 - имеет место при отключении компрессора. Для нагреваемых объектов, в которых u1 соответствует притоку энергии, а u0 - оттоку энергии, в предлагаемом способе достаточно изменить тип управляющего воздействия: «выключено» изменить на «включено», а «включено» - на «выключено».
В начальный период изменения регулируемой величины от одной крайней позиции до другой и обратно к первой регулирование происходит обычным двухпозиционным способом с зоной неоднозначности. Длительность импульса при этом соответствует времени изменения регулируемой величины от верхнего значения зоны регулирования до нижнего, а пауза между импульсами - времени изменения от нижнего значения к верхнему. На последующих периодах происходит реализация адаптации длительности импульсов и их периода за счет изменения пауз между ними, на основании имеющей место связи притока и оттока энергии с поведением регулируемой величины.
Адаптация производится на основании допущения о линейной зависимости изменения регулируемой величины ΔX от изменения энергии объекта ΔQ:

где K - коэффициент пропорциональности. Такая зависимость характерна для тепловых объектов, регулируемой величиной которых является температура (изменение температуры ΔT связано с изменением количества теплоты тела ΔQ через теплоемкость C: ΔQ=CΔT); объектов, в которых происходит регулирование уровня жидкости (изменение объема жидкости ΔV для цилиндрических баков или баков в форме параллелепипеда пропорционально изменению уровня ΔH:ΔV=SΔH, где S - площадь поперечного сечения бака).
Считая, что приток энергии из внешней среды до момента t0 был примерно равен оттоку энергии, вызванному управляющим воздействием u1, т.е. изменения регулируемой величины были незначительными, можно говорить о том, что изменение энергии объекта управления, вызванное управляющим воздействием u1, за время  привело к изменению регулируемой величины на
привело к изменению регулируемой величины на  как показано на фиг.1,a.
как показано на фиг.1,a.
Изменение энергии объекта управления связано с изменением притока и оттока энергии в единицу времени:

где N0 - отток энергии в единицу времени, вызванный управляющим воздействием; N1 - приток энергии в единицу времени за счет внешней среды. Дальнейшие расчеты производятся для медленно меняющейся нагрузки объекта, т.е. если N1≈const и N2≈const в течение как минимум двух периодов изменения регулируемой величины.
Согласно (1) количество энергии, отнятое у объекта за время  , т.е. в нулевом периоде, когда действует обыкновенное позиционное регулирование с зоной неоднозначности, равно:
, т.е. в нулевом периоде, когда действует обыкновенное позиционное регулирование с зоной неоднозначности, равно:

Учитывая связь изменения энергии объекта с ее притоком и оттоком (2), из равенства (3) имеем:

Аналогично, для следующего, первого, периода регулирования, в котором необходимо произвести изменение регулируемой величины от значения  до уровня Xmin за время
до уровня Xmin за время  , можно получить:
, можно получить:

Выражая K из равенства (4) для нулевого периода и подставляя его в равенство (5) для первого периода, получаем длительность импульса для первого периода регулирования, при которой регулируемая величина под действием управляющего воздействия u1 изменится от уровня , соответствующего началу импульса, до уровня Xmin нижнего значения зоны регулирования:

Адаптация пауз между импульсами происходит по аналогии с адаптацией длительности импульсов. Продолжительность паузы в первом периоде регулирования рассчитывается на основе длительности паузы нулевого периода, а также предшествующего и требуемого изменений регулируемой величины в нулевом и первом периодах регулирования (фиг.1, б):

где  - продолжительность паузы в нулевом периоде, когда действует обыкновенное позиционное регулирование с зоной неоднозначности;
- продолжительность паузы в нулевом периоде, когда действует обыкновенное позиционное регулирование с зоной неоднозначности;  - адаптированная продолжительность паузы в первом периоде регулирования.
- адаптированная продолжительность паузы в первом периоде регулирования.
Из соотношений (6) и (7) получаем зависимости для определения адаптированных продолжительностей импульса и паузы для i-го периода на основании данных об изменении регулируемой величины в предыдущем (i-1)-м периоде:


Расчетные зависимости (8) и (9) позволяют учесть различные варианты соотношения начального уровня регулируемой величины, минимального и максимального достигнутого значения регулируемой величины по отношению к минимальной и максимальной границе зоны нечувствительности. Т.е. в отличие от ситуации, представленной на фиг.1, в общем случае, например, может быть  и
и  , а
, а  и
и  . Также следует учитывать, что поскольку объекты, к которым применяется рассматриваемый способ регулирования, обладают внутренним запаздыванием, время начала и прекращения импульса следует считать соответственно с момента убывания и возрастания регулируемой величины, находящейся в средней позиции диапазона регулирования.
. Также следует учитывать, что поскольку объекты, к которым применяется рассматриваемый способ регулирования, обладают внутренним запаздыванием, время начала и прекращения импульса следует считать соответственно с момента убывания и возрастания регулируемой величины, находящейся в средней позиции диапазона регулирования.
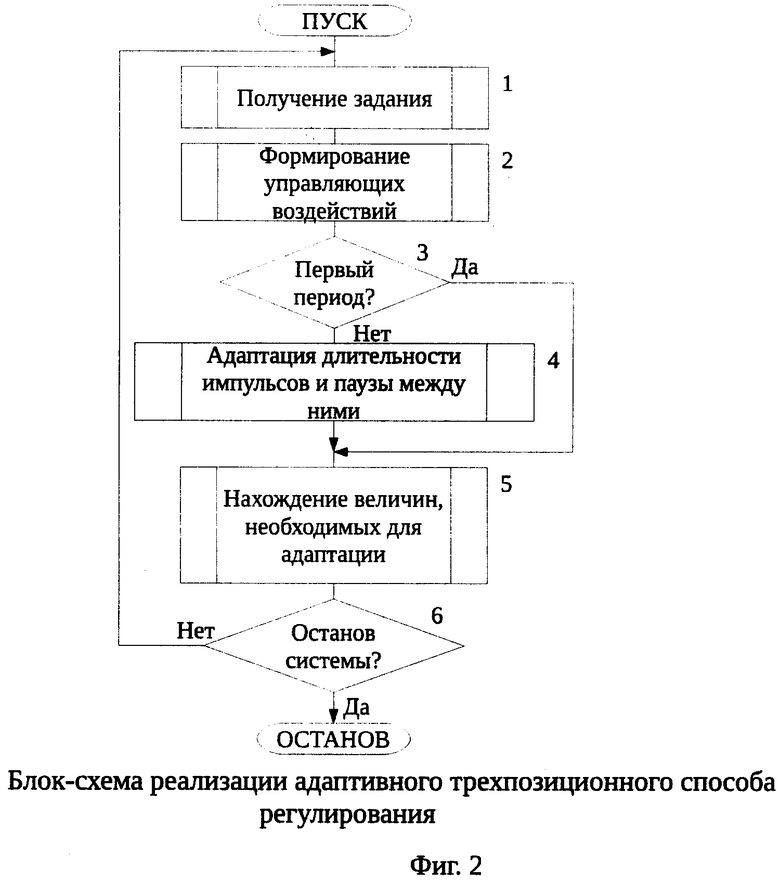
Реализация предлагаемого способа регулирования описана блок-схемой, приведенной на фиг.2. Она содержит блок 1, который расшифровывает блок-схема, приведенная на фиг.3, по получению задания зоны нечувствительности регулятора [Xmin;Xmax] и Xmax, текущего значения регулируемой величины X и задания типа статической характеристики Revers, «прямая» или «обратная». На фиг.4 приведена блок-схема по расшифровке блока 2 - формирование управляющих воздействий в крайних позициях и ШИМ-импульсов в средней позиции. Адаптация длительности импульсов и паузы между ними происходит в случае, если текущий период не является первым (блок 3 фиг.2). Процесс адаптации в соответствии с блоком 4 фиг.2 расшифровывает блок-схема, приведенная на фиг.5, а нахождение величин, необходимых в процессе адаптации (блок 5 фиг.2) расшифровывает блок-схема, приведенная на фиг.6. Согласно блоку 6 на фиг.2, если происходит остановка системы, например, в случае ручного выключения контроллера, входящего в систему управления, с прошитой программой, реализующей предлагаемый адаптивный способ регулирования, работа программы прекращается. Иначе происходит возврат к выполнению блока 1 фиг.2, и процесс управления продолжается.
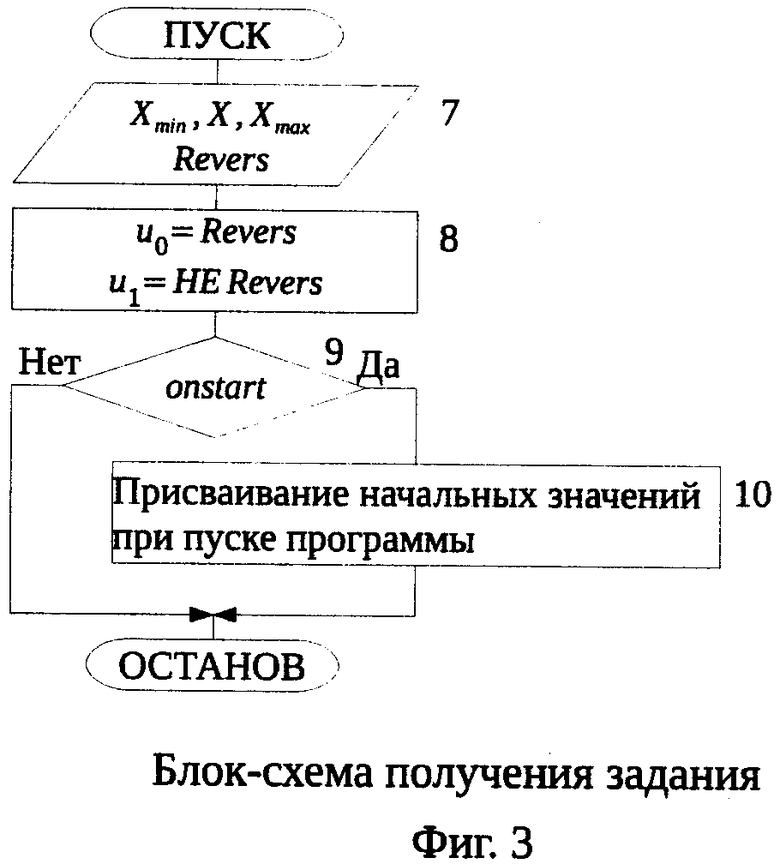
Согласно блок-схеме на фиг.3 в начале задают значение нижней Xmin и верхней Xmax границы зоны нечувствительности регулятора, текущее значение регулируемой величины X и задание «прямой» или «обратной» статической характеристики регулятора Revers (блок 7 фиг.3). Если заданная статическая характеристика является «прямой», логическая переменная Revers устанавливается в значение «ИСТИНА». При этом в соответствии с блоком 8 фиг.3 тип управляющего воздействия u0, также являющийся логической переменной, примет значение «ИСТИНА», а u1 - «ЛОЖЬ». В этом случае, если управляющее воздействие U в текущий момент времени будет равно U=u0, то это будет соответствовать включению исполнительного устройства, a U=u1 - отключению. Для реализации «обратной» статической характеристики регулятора переменная Revers устанавливается в значение «ЛОЖЬ». Тогда управляющее воздействие U=u0 будет соответствовать нахождению исполнительного устройства в режиме «выключено», а U=u1 - «включено». После этого проверяется значение логической переменной onstart (блок 9 фиг.3), и если оно равно «ИСТИНА», что соответствует пуску программы, реализующей трехпозиционный адаптивный способ регулирования, инициируются начальные значения переменных (блок 10 фиг.3), используемые при работе программы.
Блоки 11-18 фиг.4 описывают формирование управляющих воздействий при нахождении регулируемой величины в крайних позициях регулятора. В блоке 11 фиг.4 проверяется, является ли значение регулируемой величины X в текущий момент времени меньшим, чем нижняя граница зоны нечувствительности Xmin, и если да, то согласно блоку 12 фиг.4 для возврата величины X в среднюю позицию применяется управляющее воздействие U, равное U=u0. При этом момент времени fstop прекращения подачи импульса приравнивается значению системного времени TIME в текущий момент (блок 13 фиг.4), а время toff, прошедшее с момента tstop, обнуляется (блок 14 фиг.4). В другом случае, если X>Xmax, что проверяется в блоке 15 фиг.4, происходит возврат величины X в среднюю позицию управляющим воздействием U=u1 (блок 16 фиг.4), момент времени tstart начала подачи импульса приравнивается значению системного времени TIME в текущий момент (блок 17 фиг.4), а время ton, прошедшее с момента tstart, обнуляется (блок 18 фиг.4).
В блоках 19 и 20 фиг.4 реализуется для случая охлаждаемого объекта управления нахождение момента времени начала подачи импульса fstart, который равен текущему системному времени (блок 20 фиг.4) при выполнения условия, что текущее управляющее воздействие должно быть равно U=u1 и после последнего переключения управляющего воздействия со значения U=u0 назначение U=u1 регулируемая величина не изменялась, т.е. логическая переменная Xchange имеет значение «ЛОЖЬ», или регулируемая величина в текущий момент времени имеет значение, большее чем значение регулируемой величины X01 в момент переключения (блока 19 фиг.4). Аналогично в блоках 21 и 22 фиг.4 описывается нахождение момента времени tstop, соответствующего началу паузы.
Блоки 23-26 фиг.4 описывают прекращение подачи импульса, когда время ton, прошедшее с момента начала импульса, становится больше, чем адаптированная продолжительность импульса timp (блок 23 фиг.4). При этом происходит переключение управляющего воздействия на U=u0, момент времени fstop, соответствующий началу паузы, приравнивается текущему значению системного времени TIME, а время ton обнуляется (блоки 24-26 фиг.4). Аналогично в блоках 27-30 фиг.4 описывается окончание паузы, когда время toff, прошедшее с момента прекращения подачи импульса, становится больше, чем адаптированная продолжительность паузы trelax (блок 27 фиг.4).
Время ton рассчитывается при условии равенства управляющего воздействия U=u1 (блок 31 фиг.4) как разность между текущим моментом системного времени TIME и моментом времени начала подачи импульса fstart (блок 32 фиг.4), а время toff - как разность между текущим моментом системного времени TIME и моментом времени начала паузы tstop (блок 34 фиг.4) при условии равенства управляющего воздействия U=u0 (блок 33 фиг.4).
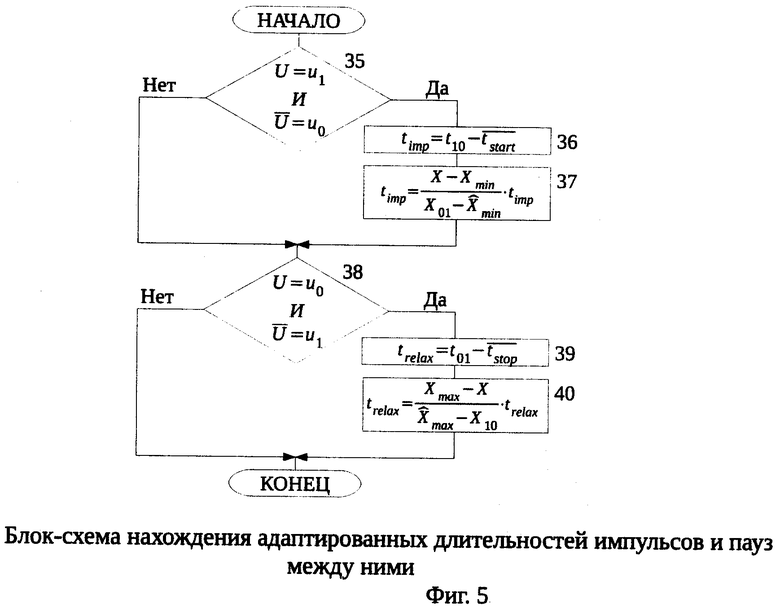
Блок-схема, приведенная на фиг.5, описывает адаптацию продолжительностей импульсов и пауз на основании соотношений (8) и (9). Адаптация продолжительности импульса timp происходит при смене управляющего воздействия с u0 на u1, т.е. если значение управляющего воздействия в предыдущий момент времени  равнялось
равнялось  , а управляющим воздействием в текущий момент времени U является U=u1 (блок 35 фиг.5). При этом рассчитывается продолжительность импульса в предыдущем периоде как разность между моментом времени t10 последнего изменения управляющего воздействия с u1 на u0 и моментом времени
, а управляющим воздействием в текущий момент времени U является U=u1 (блок 35 фиг.5). При этом рассчитывается продолжительность импульса в предыдущем периоде как разность между моментом времени t10 последнего изменения управляющего воздействия с u1 на u0 и моментом времени  начала подачи предыдущего импульса (блок 36 фиг.5). Нахождение адаптированного значения продолжительности импульса на основании соотношения (8) описывается блоком 37 фиг.5, в котором через X01 обозначено значение регулируемой величины X в момент времени t01 последнего изменения управляющего воздействия с u0 на u1. По аналогии в блоках 38-40 фиг.5 описывается адаптация паузы trelax между импульсами при смене управляющего воздействия с u1 на u0.
начала подачи предыдущего импульса (блок 36 фиг.5). Нахождение адаптированного значения продолжительности импульса на основании соотношения (8) описывается блоком 37 фиг.5, в котором через X01 обозначено значение регулируемой величины X в момент времени t01 последнего изменения управляющего воздействия с u0 на u1. По аналогии в блоках 38-40 фиг.5 описывается адаптация паузы trelax между импульсами при смене управляющего воздействия с u1 на u0.
Блок-схема, приведенная на фиг.6, описывает нахождение величин, необходимых в процессе управления и адаптации. В блоках 42-45 фиг.6 реализовано присваивание значений переменным  , t10, X10 и Xchange при смене управляющего воздействия с u1 на u0 (блок 41 фиг.6). Аналогично, в блоках 47-50 производится присваивание значений переменным
, t10, X10 и Xchange при смене управляющего воздействия с u1 на u0 (блок 41 фиг.6). Аналогично, в блоках 47-50 производится присваивание значений переменным  , t01, X01 и Xchange при смене управляющего воздействия с u0 на u1 (блок 46 фиг.6). Блоки 51-54 фиг.6 описывают нахождение минимального
, t01, X01 и Xchange при смене управляющего воздействия с u0 на u1 (блок 46 фиг.6). Блоки 51-54 фиг.6 описывают нахождение минимального  и максимального достигаемого значения регулируемой величины в процессе функционирования. Блоки 55 и 56 фиг.6 предназначены для подсчета переключений управляющего воздействия ChangeU, что необходимо для определения количества поданных ШИМ-импульсов. В блоке 57 фиг.6 происходит переприсваивание переменной
и максимального достигаемого значения регулируемой величины в процессе функционирования. Блоки 55 и 56 фиг.6 предназначены для подсчета переключений управляющего воздействия ChangeU, что необходимо для определения количества поданных ШИМ-импульсов. В блоке 57 фиг.6 происходит переприсваивание переменной  таким образом, что в следующем цикле, реализуемом блок-схемой фиг.2, значение переменной
таким образом, что в следующем цикле, реализуемом блок-схемой фиг.2, значение переменной  будет равно текущему значению управляющего воздействия U. Блоки 58 и 59 фиг.6 реализуют присваивание значения «ИСТИНА» переменной Xchange (блок 59 фиг.6) при изменении регулируемой величины (блок 58 фиг.6), т.е. в случае если текущее значение регулируемой величины X не равно значению регулируемой величины
будет равно текущему значению управляющего воздействия U. Блоки 58 и 59 фиг.6 реализуют присваивание значения «ИСТИНА» переменной Xchange (блок 59 фиг.6) при изменении регулируемой величины (блок 58 фиг.6), т.е. в случае если текущее значение регулируемой величины X не равно значению регулируемой величины  в предыдущем цикле, реализованном в блок-схеме фиг.2. В блоке 60 фиг.6 реализовано переприсваивание переменной
в предыдущем цикле, реализованном в блок-схеме фиг.2. В блоке 60 фиг.6 реализовано переприсваивание переменной  таким образом, что в следующем цикле, реализуемом блок-схемой фиг.2, значение переменной будет равно текущему значению регулируемой величины X. Аналогично в блоках 61 и 62 фиг.6 находятся моменты прекращения
таким образом, что в следующем цикле, реализуемом блок-схемой фиг.2, значение переменной будет равно текущему значению регулируемой величины X. Аналогично в блоках 61 и 62 фиг.6 находятся моменты прекращения  и начала
и начала  подачи предыдущего импульса. Наконец, в блоке 63 фиг.6 переменной onstart присваивается значение «ЛОЖЬ», в соответствии с которым при проверке этой переменной в последующих циклах работы программы инициализация начальных значений переменных (блок 10 фиг.3) не происходит.
подачи предыдущего импульса. Наконец, в блоке 63 фиг.6 переменной onstart присваивается значение «ЛОЖЬ», в соответствии с которым при проверке этой переменной в последующих циклах работы программы инициализация начальных значений переменных (блок 10 фиг.3) не происходит.
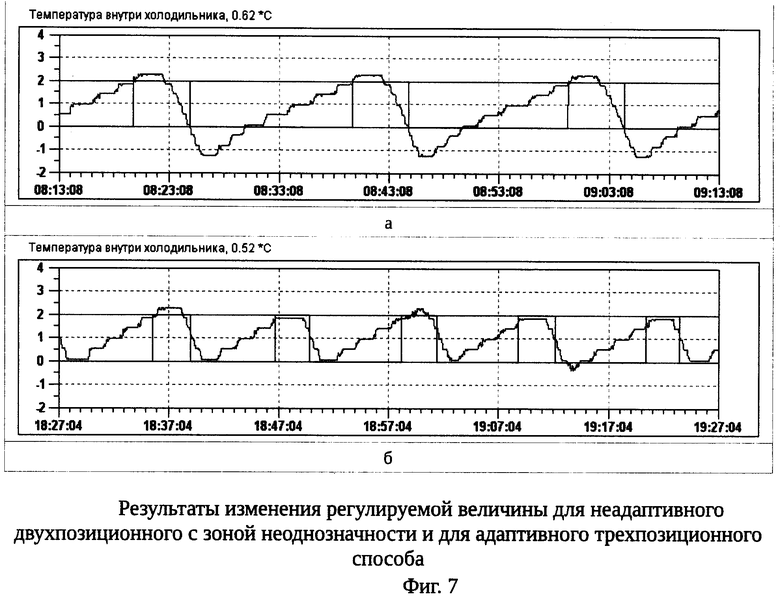
Адаптивный трехпозиционный способ регулирования был применен в программе управления бытовым холодильником. Регулируемой величиной являлась температура в холодильной камере, управляющие воздействия соответствовали «включению»/«выключению» компрессора холодильника. Полученные результаты изменения регулируемой величины для неадаптивного двухпозиционного с зоной неоднозначности (фиг.7,а) и для адаптивного трехпозиционного способа (фиг.7,б) показали повышение качества регулирования за счет минимизации выбегов регулируемой величины за пределы диапазона регулирования, что обеспечивается адаптивным изменением характеристик управляющих импульсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 2010 |
|
RU2408913C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2158435C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОДАВЛЕНИЯ ВИБРАЦИИ ПОМОЛЬНО-СМЕСИТЕЛЬНОГО АГРЕГАТА | 2014 |
|
RU2567158C1 |
| СИСТЕМА АДАПТИВНОГО ДВУХПОЗИЦИОННОГО УПРАВЛЕНИЯ | 2010 |
|
RU2430398C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2129726C1 |
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2047210C1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| СПОСОБ РЕАЛИЗАЦИИ ТРЕХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2001 |
|
RU2220432C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2144690C1 |

Изобретение относится к способам автоматизации, а именно к способу адаптивного трехпозиционного регулирования. Технический результат - улучшение качества регулирования за счет удержания регулируемой величины в зоне нечувствительности регулятора и особенно эффективно для объектов со спорадически или медленно меняющейся в больших пределах нагрузкой. Для достижения указанного результата в крайних позициях применяется одно из потенциальных значений управляющих воздействий для возврата регулируемой величины в зону нечувствительности регулятора, а при нахождении регулируемой величины в пределах зоны нечувствительности регулирование осуществляется ШИМ-импульсами, с адаптирующимися длительностью и периодом. 7 ил.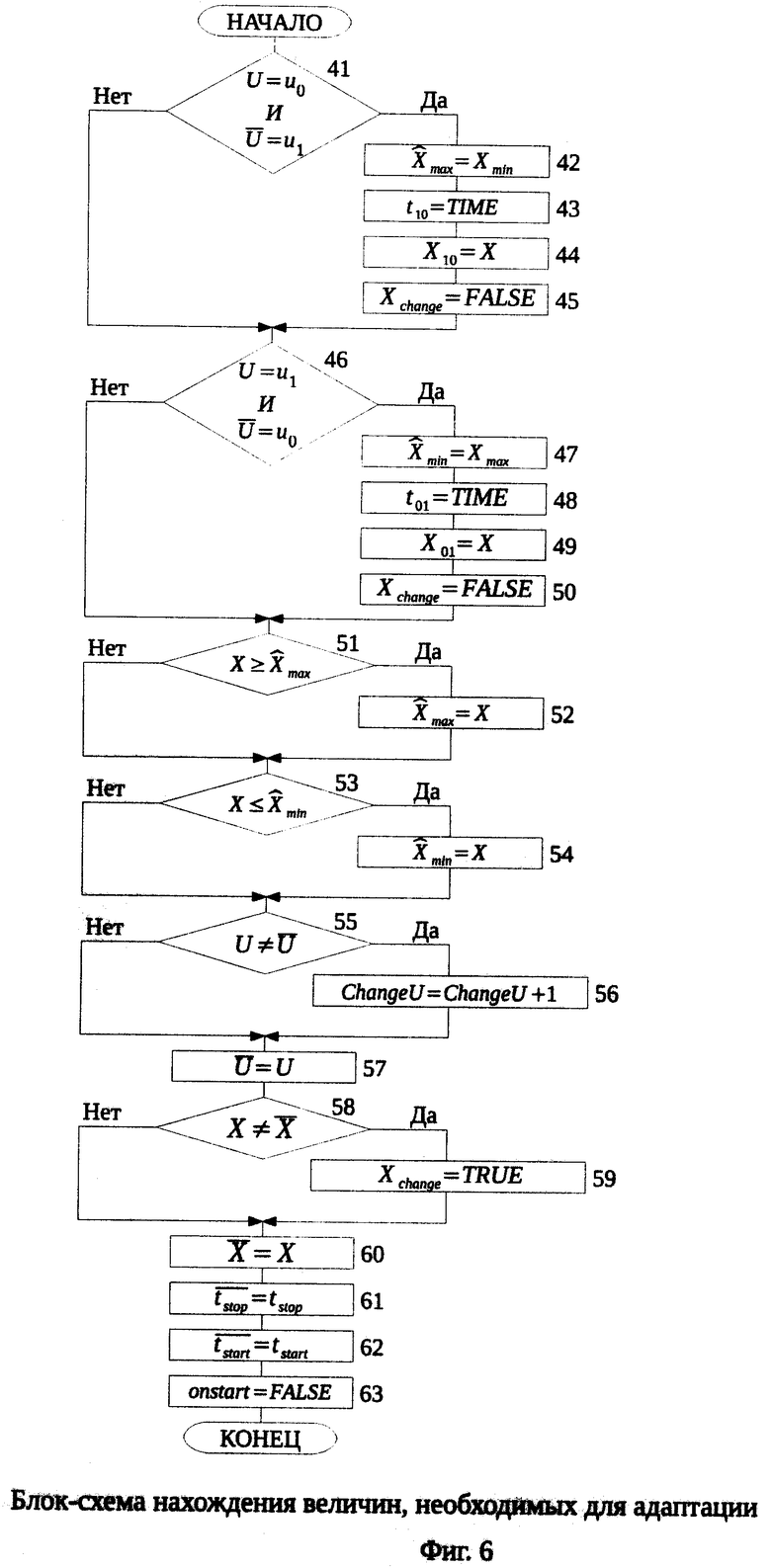
Способ адаптивного трехпозиционного регулирования, в котором в крайних позициях применяется одно из потенциальных значений управляющих воздействий для возврата регулируемой величины в зону нечувствительности регулятора, а при нахождении регулируемой величины в пределах зоны нечувствительности регулирование осуществляется ШИМ-импульсами, отличающийся тем, что адаптируются как длительность, так и период ШИМ-импульсов на основании зависимостей достигнутого минимального/максимального значений регулируемой величины и продолжительности импульса и паузы в предыдущем периоде, которые определяются на основании следующих зависимостей:


где  - продолжительность импульса после адаптации в текущем периоде;
- продолжительность импульса после адаптации в текущем периоде;
 - продолжительность импульса до адаптации в предыдущем периоде;
- продолжительность импульса до адаптации в предыдущем периоде;
 - значение регулируемой величины до начала импульса в текущем периоде;
- значение регулируемой величины до начала импульса в текущем периоде;
 - значение регулируемой величины до начала импульса в предыдущем периоде;
- значение регулируемой величины до начала импульса в предыдущем периоде;
Xmin - нижняя граница зоны нечувствительности регулятора;
 - измеренное минимальное значение регулируемой величины в предыдущем периоде;
- измеренное минимальное значение регулируемой величины в предыдущем периоде;
 - продолжительность паузы после адаптации в текущем периоде;
- продолжительность паузы после адаптации в текущем периоде;
 - продолжительность паузы до адаптации в предыдущем периоде;
- продолжительность паузы до адаптации в предыдущем периоде;
 - значение регулируемой величины до начала паузы в текущем периоде;
- значение регулируемой величины до начала паузы в текущем периоде;
 - значение регулируемой величины до начала паузы в предыдущем периоде;
- значение регулируемой величины до начала паузы в предыдущем периоде;
Xmax - верхняя граница зоны нечувствительности регулятора;
 - измеренное максимальное значение регулируемой величины в предыдущем периоде.
- измеренное максимальное значение регулируемой величины в предыдущем периоде.
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2047210C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2325682C1 |
| АДАПТИВНЫЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 2010 |
|
RU2408913C1 |
| DE 3527906 A1, 12.02.1987. | |||

