Изобретение относится к подъемно-транспортному оборудованию, а именно к шахтным транспортным средствам, и может быть использовано в канатно-рельсовых дорогах для транспортирования людей и грузов в горных выработках со знакопеременным профилем пути.
Известны напочвенные канатные дороги с замкнутым тяговым канатом типа ДКН (ДКНЛ1, ДКН2, ДКН4).
Канатная рельсовая дорога типа ДКН включает рельсовый путь, собранный из обычных шахтных рельсов при помощи стыковых замков, со специальным стрелочным переводом, имеющим поворотный рельс, буксировочную тележку и сцепленный с ней подвижной состав, перемещаемый по рельсовому пути замкнутым тяговым канатом [1].
Известный тип дорог обеспечивает безопасную транспортировку как людей, так и грузов в выработках знакопеременного профиля пути. В таких дорогах буксировочная тележка оснащена тормозной системой двухстороннего действия. Однако этот тип дорог невозможно эксплуатировать на обычном рельсовом пути, собираемом на деревянных шпалах из рельсов типа Р (Р24, Р33) при помощи стандартных соединительных накладок.
Использование в этих дорогах рельсового пути со стрелочным переводом, собираемого описанным способом [1], требует дополнительных трудозатрат при его монтаже и в дальнейшем во время эксплуатации.
Известны также напочвенные дороги с замкнутым тяговым канатом, работающие на дорожном полотне из спецпрофиля (усиленного швеллера),
Наиболее совершенной из этих канатных дорог является "Штрекенкули" фирмы "Шарф" (ФРГ).
Канатная дорога этой фирмы содержит замкнутый тяговый канат с подвижным составом, перемещающимся по дорожному полотну из спецпрофиля [2].
Недостатком этой канатной дороги является необходимость выполнения перегрузочных работ на стыке с рельсовым локомотивным транспортом, что повышает общее технологическое время доставки, а также трудоемкость транспортных работ и вероятность травматизма рабочих.
Кроме того, в местах перегрузки может возникнуть необходимость выполнить разделку выработки под перегрузочные камеры для размещения требуемых средств механизации.
Из описанного следует, что использование данного типа дорог нецелесообразно на действующих шахтах отечественной угольной промышленности.
Известна канатно-рельсовая дорога, работающая на обычном шахтном рельсовом пути и включающая рельсовый путь со стандартным стрелочным переводом, буксировочную вагонетку, снабженную тормозной системой одностороннего действия, и связанные с ней грузовые вагонетки, перемещаемые по рельсовому пути замкнутым тяговым канатом, при этом для использования дороги в выработках знакопеременного профиля пути она снабжена дополнительной буксировочной вагонеткой также с тормозной системой одностороннего действия, оборудованной гибкой сцепкой с длиной, превышающей длину подвижного состава грузовых вагонеток [3].
Недостатком этой дороги, принятой в качестве прототипа, является невозможность доставки людей в выработках со знакопеременным профилем пути, поскольку не решен в соответствии с действующими правилами безопасности вопрос ручного управления срабатыванием тормозных систем буксировочных вагонеток кондуктором, находящимся на одной из них, а следовательно, и вопрос безопасного транспортирования людей в этих условиях.
В основу изобретения поставлена задача создать такую канатно-рельсовую дорогу, в которой было бы обеспечено ручное управление тормозными системами буксировочных вагонеток, разделенных подвижным составом, при доставке людей и грузов в выработках знакопеременного профиля, в которых уложен обычный рельсовый путь.
Достигается поставленная задача тем, что в канатно-рельсовой дороге по первому варианту, содержащей замкнутый тяговый орган, состоящий из тягового каната, двух буксировочных вагонеток с тормозными системами одностороннего действия и гибкой сцепки, связывающей между собой буксировочные вагонетки, разделенные подвижным составом, перемещаемым по рельсовому пути, согласно изобретению гибкая сцепка, являясь элементом замкнутого тягового органа, входит в качестве промежуточного звена в цепь ручного управления тормозной системой дороги, содержащую ручной привод с исполнительным механизмом, которыми оснащены одна из буксировочных вагонеток, и механизмы включения тормозных систем обеих буксировочных вагонеток, при этом упомянутая сцепка выполнена замкнутой через поворотные элементы, расположенные на буксировочных вагонетках, с образованием ориентированных вдоль продольной оси подвижного состава двух ветвей, имеющих возможность взаимного перемещения навстречу друг другу от ручного привода посредством исполнительного механизма, воздействующего в момент своего срабатывания на гибкую сцепку с обеспечением возможности продвижения обеих ветвей, в свою очередь гибкая сцепка посредством промежуточных связей соединена с механизмами включения тормозных систем буксировочных вагонеток.
Второй вариант заявляемой канатно-рельсовой дороги отличается от первого тем, что гибкая сцепка выполнена ориентированной вдоль продольной оси подвижного состава без образования двух ветвей. При этом ручной привод в цепи ручного управления тормозной системы дороги расположен на одной буксировочной вагонетке, а исполнительный механизм установлен на второй буксировочной вагонетке.
В сравнении с известным уровнем техники заявляемое изобретение направлено на обеспечение управления кондуктором (лицом, управляющим дорогой) тормозными системами буксировочных вагонеток, расположенных с обеих сторон подвижного состава, которое необходимо для осуществления аварийного торможения упомянутого состава дороги, работающей в горных выработках со знакопеременным профилем пути.
В канатно-рельсовой дороге по первому варианту это достигается благодаря тому, что гибкую сцепку дополнительно используют в качестве промежуточного звена, которое совместно с ручным приводом, исполнительным механизмом и механизмами включения тормозных систем буксировочных вагонеток образует цепь ручного управления тормозной системой дороги.
Для реализации этой новой функции гибкой сцепки ее выполняют замкнутой через поворотные элементы, закрепленные на буксировочных вагонетках, с образованием двух ветвей, ориентированных вдоль продольной оси подвижного состава.
Наличие поворотных элементов в гибкой сцепке, имеющих возможность вращения вокруг своих осей, позволяет осуществить принудительное продвижение ветвей этой сцепки навстречу друг другу под воздействием исполнительного механизма с сохранением при этом выполнения ею основной функции, присущей прототипу [3].
Такое принудительное продвижение ветвей гибкой сцепки позволяет ей участвовать в ручном управлении тормозной системой дороги.
Кроме того, замкнутость гибкой сцепки позволяет осуществить ручное управление тормозной системой дороги без изменения (увеличения или уменьшения) общей длины этой сцепки, принятой для конкретного подвижного состава.
Оснащение гибкой сцепки исполнительным механизмом, размещаемым на одной из буксировочных вагонеток, облегчает кондуктору включение тормозных систем, т. к. затрачиваемое при этом им усилие идет только на включение этого исполнительного механизма, который, в свою очередь, выполняя функцию силового привода, осуществляет принудительное продвижение ветвей гибкой сцепки.
Такое конструктивное исполнение гибкой сцепки наделяет ее, кроме основной функции, дополнительной новой функцией, выражающейся в использовании ее в цепи ручного управления срабатыванием тормозных систем буксировочных вагонеток.
Наличие кинематических связей, введенных между гибкой сцепкой и механизмами включения тормозных систем буксировочных вагонеток, обеспечивает передачу воздействия гибкой сцепки в момент ее продвижения на указанные механизмы включения, что приводит к срабатыванию тормозной системы буксировочных вагонеток, которое, в свою очередь, после процесса аварийного торможения приводит к полной остановке подвижного состава.
В канатно-рельсовой дороге по второму варианту за счет выполнения гибкой сцепки, ориентированной вдоль оси подвижного состава без образования двух ветвей, и оснащения ее дополнительными элементами, связанными на одной буксировочной вагонетке с ручным приводом, а на другой буксировочной вагонетке - с исполнительным механизмом, достигается возможность продольного перемещения сцепки при воздействии кондуктора на ручной привод, а это позволило также использовать гибкую сцепку в цепи ручного управления тормозными системами буксировочных вагонеток.
Таким образом, оба варианта заявляемого изобретения обеспечивают осуществление ручного управления тормозными системами буксировочных вагонеток, разделенных подвижным составом, а этим достигается безопасная доставка людей и грузов в горных выработках со знакопеременным профилем рельсового пути.
Преимуществом первого варианта дороги по сравнению со вторым является то, что при выполнении гибкой сцепкой функции управления тормозной системой дороги не происходит изменение общей длины этой сцепки, при этом сохраняется выполнение ею основной функции. То есть выполнение гибкой сцепкой одной функции не влияет на выполнение ею другой функции, что позволяет осуществлять их одновременно, не вызывая изменение относительно расположения буксировочных вагонеток в подвижном составе.
При втором варианте дороги сохранение таких же, как в прототипе, условий взаимодействия гибкой сцепки с устройствами дороги, обеспечивающими ориентацию тягового каната, не вызывает возникновение необходимости решения вопросов, касающихся прохождения гибкой сцепкой стрелочных переводов, а также участков трассы, искривленных по профилю или в плане.
Таким образом, из вышеизложенного следует, что заявляемое изобретение позволяет достигнуть технический результат, который явным образом не следует из сведений об уровне техники, а потому оно имеет изобретательский уровень.
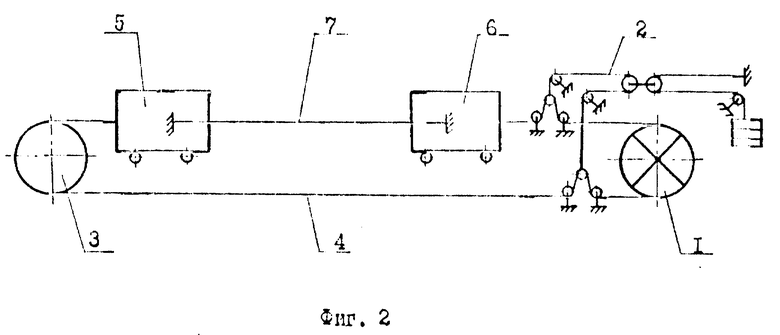
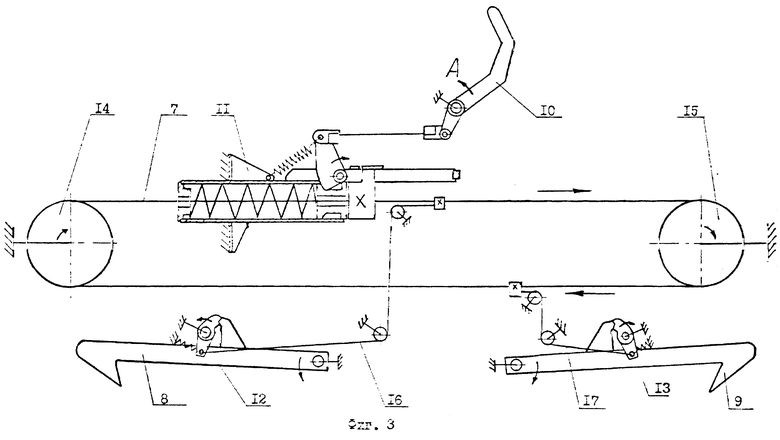
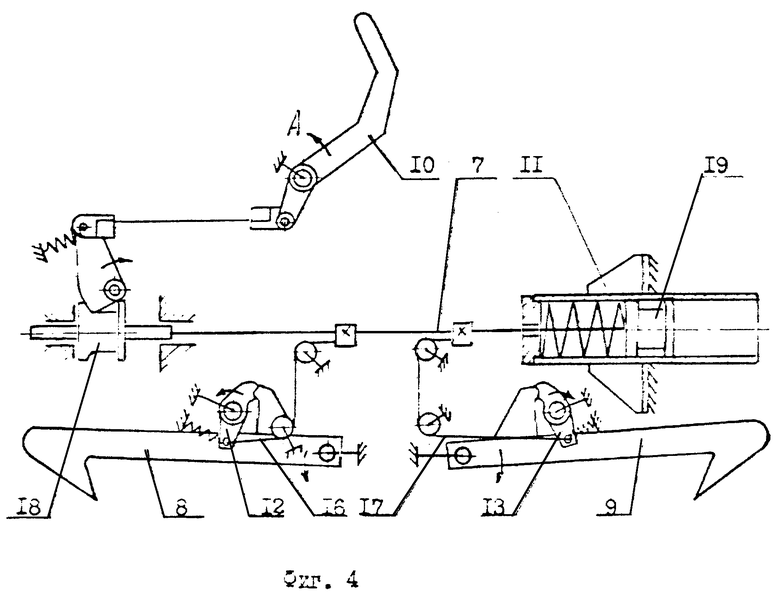
На фиг. 1 схематически показана описываемая канатно-рельсовая дорога, общий вид, первый вариант; на фиг. 2 - то же, что на фиг. 1, второй вариант; на фиг. 3 - схема цепи ручного управления тормозной системой дороги, первый вариант; на фиг. 4 - то же, что на фиг. 3, второй вариант.
В первом варианте (фиг.1, 3) канатно-рельсовая дорога содержит привод 1, натяжное устройство 2, концевую станцию 3, замкнутый тяговый орган, состоящий из тягового каната 4, проходящего по оси рельсового пути, буксировочных вагонеток 5, 6 и гибкой сцепки 7, связывающей буксировочные вагонетки 5, 6 между собой.
Гибкая сцепка 7 имеет длину, превышающую длину расположенного между буксировочными вагонетками 5 и 6 подвижного состава (условно не показан), перемещаемого по обычному рельсовому пути тяговым канатом 4.
Буксировочные вагонетки 5 и 6 снабжены тормозными системами одностороннего действия 8 и 9.
Кроме того, гибкая сцепка 7, являясь элементом замкнутого тягового органа, введена в качестве промежуточного звена в цепь ручного управления тормозной системой дороги, содержащую, помимо упомянутой сцепки 7, ручной привод 10 с исполнительным механизмом 11 (использующим, например, энергию сжатой пружины), которыми оснащена одна из буксировочных вагонеток, и механизмы включения 12, 13 тормозных систем 8, 9 буксировочных вагонеток 5 и 6.
Для введения гибкой сцепки 7 в цепь ручного управления тормозной системой дороги эта сцепка выполнена замкнутой через поворотные элементы 14, 15, расположенные на буксировочных вагонетках 5 и 6, с образованием ориентированных вдоль продольной оси подвижного состава двух ветвей.
Чтобы обеспечить принудительное продвижение навстречу друг другу обеих ветвей гибкой сцепки 7 ручной привод 10 связан с последней через исполнительный механизм 11.
В свою очередь гибкая сцепка 7 посредством промежуточных связей 16, 17, например, стальных тросиков, соединена с механизмами включения 12, 13 тормозных систем 8, 9 буксировочных вагонеток 5 и 6.
Предлагаемая канатно-рельсовая дорога работает следующим образом.
В режиме нормальной эксплуатации дорога перевозит грузы или людей и независимо от вида перевозок в подвижном составе обязательно находится кондуктор.
При этом рукоятка ручного привода 10 находится в исходном положении, когда не требуется срабатывание тормозной системы дороги, пружина исполнительного механизма 11 взведена и застопорена, механизмы включения 12, 13 удерживают ловители тормозных систем 8, 9 в транспортном положении.
При аварийной ситуации, например, при обрыве тягового каната 4, состав дороги скатывается под уклон. При этом кондуктор, перемещая рукоятку ручного привода 10 по направлению стрелки А, показанной на фиг. 3, включает исполнительный механизм 11, который, в свою очередь, воздействует на гибкую сцепку 7, осуществляя продвижение ее ветвей в противоположных направлениях.
Поскольку через промежуточные связи 16, 17 гибкая сцепка 7 соединена с механизмами включения 12, 13 тормозных систем 8, 9 буксировочных вагонеток 5 и 6, то происходит перевод ловителей тормозных систем 8, 9 из транспортного положения в рабочее положение.
В результате происходит остановка подвижного состава дороги тормозной системой той буксировочной вагонетки, ловитель которой войдет в зацепление со шпалой рельсового пути.
Для приведения дороги в режим нормальной эксплуатации ловители тормозных систем буксировочных вагонеток 5, 6 фиксируют в транспортном положении, перемещают гибкую сцепку 7 в обратном направлении, взводя при этом исполнительный механизм 11, а рукоятку ручного привода 10 переводят в исходное положение.
Отличительной особенностью второго варианта дороги, изображенной на фиг. 2 и 4, является то, что гибкая сцепка 7 имеет на концах элементы 18, 19, расположенные на буксировочных вагонетках и предназначенные для выполнения этой сцепкой тяговой функции во время работы дороги в режиме перевозки грузов и людей, а также функции управления тормозной системой дороги при аварийной ситуации.
Указанные элементы 18, 19 во время выполнения гибкой сцепкой 7 функции управления могут либо прямолинейно перемещаться совместно со сцепкой 7 относительно буксировочных вагонеток 5 и 6 при выполнении этих элементов в виде кареток, перемещающихся по направляющим в пределах заданного хода (как показано на фиг. 4), либо поворачиваться вокруг неподвижной оси, перетягивая гибкую сцепку 7 за счет наматывания на один элемент и сматывания с другого элемента при выполнении их в виде блоков с закреплением на них концов гибкой сцепки 7 (на чертеже не показано).
Возможна комбинация описанных конструктивных исполнений элементов, в которой один может быть выполнен подвижным, а другой - поворотным.
Другим отличием является размещение ручного привода 10 на одной буксировочной вагонетке, а исполнительного механизма 11 - на другой буксировочной вагонетке.
Указанные отличия позволяют сохранить взаимодействие гибкой сцепки 7 с устройствами дороги, обеспечивающими ориентацию тягового каната, в таких же условиях, как в известном решении [3].
Принцип работы дороги по второму варианту аналогичен первому, поскольку порядок выполнения действий для включения тормозных систем и буксировочных вагонеток остается таким же, как и в первом варианте.
Таким образом, заявляемая канатно-рельсовая дорога в обоих вариантах исполнения обеспечивает ручное управление тормозной системой дороги при ее эксплуатации в выработках со знакопеременным профилем на обычном рельсовом пути, а следовательно, она может быть использована для перевозки людей и грузов в этих условиях.
Источники информации, принятые во внимание при составлении описания изобретения:
1. Машины и приспособления, применяемые при проходке горных выработок для механизации вспомогательных работ и ручного труда: Каталог/Часть II. Средства механизации вспомогательных работ, применяемые на подземном транспорте, при техническом обслуживании и ремонте машин. - М.: ЦНИЭИуголь, 1992, с. 21-24.
2. Рекламные проспекты дороги "Штрекенкули 800" фирмы "Шарф" (ФРГ).
3. Патент Российской Федерации N 740573, кл. B 61 B 7/00, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРОВОЧНАЯ ВАГОНЕТКА | 1998 |
|
RU2137636C1 |
| Транспортная система | 1990 |
|
SU1729859A1 |
| Канатная дорога | 1978 |
|
SU740573A1 |
| Устройство для удлинения транспортных средств с замкнутым тяговым канатом | 1983 |
|
SU1263882A1 |
| Канатная дорога | 1983 |
|
SU1123912A1 |
| КАНАТНО-РЕЛЬСОВАЯ ДОРОГА | 1991 |
|
RU2029696C1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2000 |
|
RU2233379C2 |
| Монорельсовая подвесная установка | 1980 |
|
SU891966A2 |
| Устройство для удлинения транспортных средств с замкнутым тяговым канатом | 1981 |
|
SU1016536A1 |
| Шахтная канатная дорога | 1982 |
|
SU1151689A1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к тормозным системам буксировочных вагонеток подвижного состава канатно-рельсовой дороги. Буксировочные вагонетки соединены между собой гибкой сцепкой и снабжены аварийным тормозом одностороннего действия. Новым является то, что гибкая сцепка является тяговым элементом и элементом ручного управления аварийного тормоза одновременно. По первому варианту изобретения гибкая сцепка выполнена замкнутой через поворотные элементы и образует вдоль продольной оси подвижного состава две ветви. Одна из буксировочных вагонеток содержит ручной привод с исполнительным механизмом. Поворотные блоки, механизм включения и крюк тормоза расположены на обеих буксировочных вагонетках. В момент аварийного торможения исполнительный механизм перемещает ветви гибкой сцепки навстречу друг другу. Посредством промежуточных связей гибкая сцепка приводит в действие механизм включения аварийного тормоза. Крюк тормоза входит в зацепление со шпалой рельсового пути. По второму варианту изобретения концы гибкой сцепки закреплены на буксировочных вагонетках с возможностью обеспечения перемещения сцепки относительно подвижного состава. Для этого ручной привод размещают на одной из буксировочных вагонеток, а исполнительный механизм на другой. Использование гибкой сцепки в качестве элемента ручного управления аварийного тормоза упрощает конструкцию тормозной системы, что обеспечивает безопасность транспортирования грузов и людей в выработках знакопеременного профиля обычного рельсового пути. 2 с.п. ф-лы, 4 ил.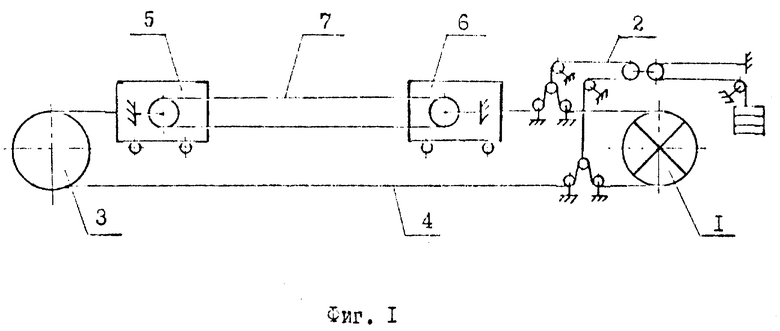
| Канатная дорога | 1978 |
|
SU740573A1 |
| КАНАТНО-РЕЛЬСОВАЯ ДОРОГА | 1991 |
|
RU2029696C1 |
| RU 2051818 C1, 10.01.96 | |||
| Машины и приспособления, применяемые при проходке горных выработок для механизации вспомогательных работ и ручного труда: Каталог/Часть 2 | |||
| - М.: ЦНИЭИуголь, 1992, с.21-24. | |||
