Изобретение относится к системам автоматического регулирования для технологических объектов.
Под регулированием по отклонению понимается регулирование с обратной связью по результатам измерения отклонения (от заданного значения) регулируемого параметра. Под предельным быстродействием регулирования понимается повторение регулирующим воздействием возмущения регулируемого параметра без внесения запаздывания (только запаздывание объекта регулирования). Ошибка отработки возмущения таким регулированием определяется только этим запаздыванием - недоотработка при нарастании возмущения и переотработка при его спадании. Для решения проблем регулирования обычно отделяют собственно регулирование от проблем объекта регулирования путем приведения параметров регулирования (возмущения, воздействия, ошибки) к единой безразмерной величине.
Известен способ реализации требуемого повторения возмущения - это "упредитель Смита" [1], согласно которому достаточно воздействовать прямо в объект ошибкой регулирования (отклонением), а затем к ней добавить регулирующее воздействие, бывшее на одно запаздывание объекта ранее. Получается прямая связь, охваченная положительной запаздывающей связью, образующая счетчик с шагом длительностью в одно запаздывание объекта, что обеспечивает устойчивость повторения возмущения и запоминание результатов.
Однако реальные возмущения обладают конечной длительностью - нарастание возмущения неизбежно сопровождается его спадением. При недостаточном возмущении переотработка его спадания ведет к удвоению возмущения вместо его отработки. Такое раскачивание кратковременных возмущений (резонанс) ограничивает быстродействие регулирования.
Поставлена цель устранить резонанс, сохранив быстродействие регулирования.
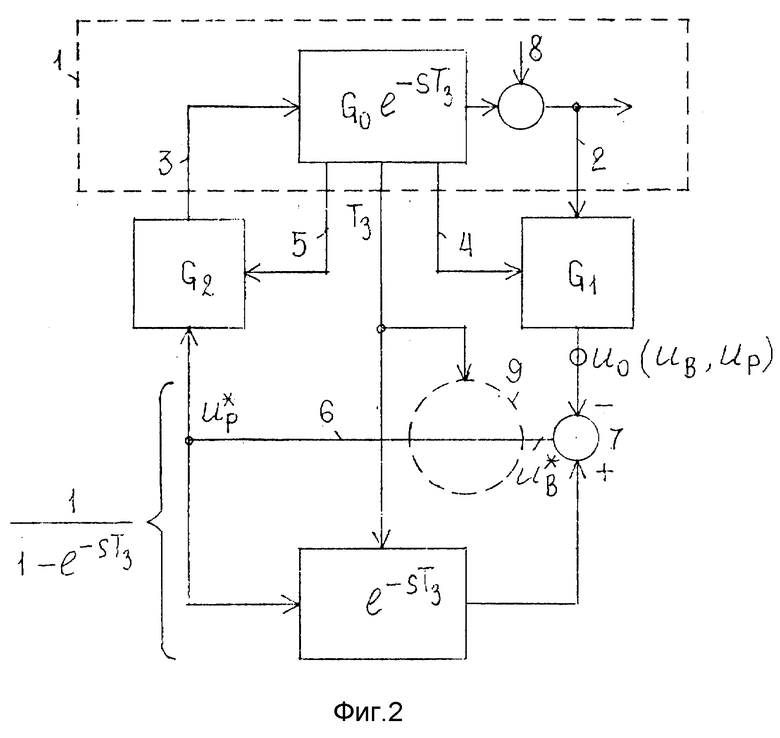
На фиг. 1 показано повторение регулирующим воздействием Up треугольного возмущения регулируемого параметра UB (а) и результат "ужатия" регулирующего воздействия Up Y (б). На фиг. 2 изображена структурная схема системы регулирования, реализующая предлагаемый способ.
Сущность рассматриваемого способа регулирования заключается в том, что особенности объекта регулирования 1 (см. фиг 2), содержащего запаздывание Tз, отделяют от собственно регулирования, для чего приводят отклонение (от заданного значения) регулируемого параметра и регулирующее воздействие к единой безразмерной величине (соответственно к UO и Up *) компенсацией (соответственно G1 и G2) зависимостей G0 особенностей объекта от каких-либо изменяющихся параметров 4 и 5. Например, переводят в удельные величины. В этом случае собственно регулирование зависит только от запаздывания конкретного объекта Tз.
Предельному быстродействию собственно регулирования, отделенного от объекта регулирования, идеально соответствует "упредитель Смита" [1].
Это прямое 6 (без преобразований и усилений) воздействие Up * отклонением U0 с положительной запаздывающей обратной связью, добавляющей 7 к этому отклонению связанное с ним воздействие, но бывшее на одно запаздывание объекта Tз ранее. Добавление уже осуществленного воздействия к отклонению регулируемого параметра восстанавливает возмущение 8 (отнесенное к выходу объекта), но бывшее на одно запаздывание ранее. Таким образом воздействие Up * повторяет возмущение UB * (в приведенном значении), бывшее на одно запаздывание объекта Tз ранее, фактически размыкая на это время регулирование, обеспечивая этим устойчивость. На фиг. 1 а показан результат такого повторения на примере отработки треугольного возмущения UB (с постоянным темпом нарастания и спадания). Для совмещения во времени регулирующее воздействие Up * перенесено Up (фиг. 2) к отклонению UO (как и возмущение UB). Приведенные друг к другу параметры регулирования UB, Up, UO измеряются в единицах изменения возмущения UB за время одного запаздывания объекта Tз, которое может меняться в зависимости от настройки и режима работы объекта, но не должно зависеть от воздействий на объект (в объекте запаздывание должно быть минимизировано ради предельного быстродействия). Время отработки возмущения также выражено в долях от этого запаздывания t/Tз. Регулирующее воздействие Up может начинать отработку конкретного возмущения UB с любого уровня, установившегося после отработки предыдущих возмущений. Регулирующее воздействие Up, повторяя возмущение UB с запаздыванием Tз, оставляет отклонение (ошибку) UO, вызванную этим запаздыванием - недоотработку 1 нарастающего возмущения и переотработку 2 спадающего возмущения. Результат отработки определяется размахом ошибки UO P относительно амплитуды возмущения, зависящим от длительности возмущения. Так, если длительность 8 Tз, то возмущение отрабатывается в 2 раза, но уже при 2Tз, вместо отработки возмущение раскачивается в 2 раза из-за того, что воздействие запаздало. Такой резонанс ограничивает возможности предельно быстродействующего регулирования, хотя до предела устойчивости еще далеко.
Предлагается способ прекращения резонанса при сохранении быстродействия регулирования путем устранения причины раскачивания - устранения переотработки возмущения. Предлагается "ужать" Up Y регулирующее воздействие Up (фиг. 1б) на два запаздывания объекта Tз - задержать 4 нарастание воздействия на одно запаздывание и, наоборот, форсировать 5 (упредить) запаздывание его спадания. Такое чередование противоположностей (задержки и форсирования) смещает ошибку регулирования UO в недоотработку, сохраняя ее размах UO p, что равносильно сохранению быстродействия регулирования. Благодаря "ужатию" возмущения резонансной длительности 6 остаются без регулирующего воздействия.
Кроме того, предлагаемое "ужатие" позволяет отрабатывать возмущение с односторонней ошибкой (недоотработкой). Для этого достаточно объект регулирования настроить так, чтобы регулирующее воздействие Up не меняло полярность. В этом случае появляется возможность поддерживать регулируемый параметр вблизи какого-либо технологически опасного предела, не выходя за него.
Для реализации предлагаемого способа имеется в виду использовать особенность прямого воздействия 6 (фиг. 2) "упредителя Смита" - возможность любых операций с регулирующим воздействием без нарушения устойчивости, так как все, что идет в объект 9 не замыкается, а компенсируется 7 положительной запаздывающей обратной связью, повторяющей объект. Разделить регулирующее воздействие на нарастающее и спадающее возможно его дифференцированием и последующим разделением результата по полярности. Задержать нарастание можно, например, инерционным звеном 1-го порядка с постоянной времени, равной запаздыванию объекта регулирования. Форсировать спадание можно, исходя из темпа спадания. Запаздывание объекта регулирования и его возможное изменение определяются по результатам эксперимента.
Источник информации
1. Смит О. Д.М. Автоматическое регулирование. Физматгиз, 1962, с. 433, рис. 10.16a.
Изобретение относится к автоматическому регулированию. Технический результат изображения заключается в устранении резонанса при сохранении быстродействия. Под предельно возможным быстродействием понимается отработка возмущения с ошибкой, определяемой только запаздыванием объекта, когда усиление отработки ведет к пульсациям, а ослабление - к увеличению ошибки. Это регулирование с полным запасом устойчивости. Однако кратковременные возмущения, длительностью менее 2-х запаздываний объекта, таким регулированием вместо отработки удваиваются по амплитуде. Такой резонанс возможно ослабить ослаблением воздействия, но за счет потери быстродействия и, следовательно, за счет увеличение ошибки регулирования. Предлагается избавиться от резонанса без увеличения ошибки регулирования, для чего "ужать" кратковременное воздействие на два запаздывания объекта - задержать его нарастание на одно запаздывание и упредить запаздывание его спадания. В результате ликвидируется причина резонанса - переотработка возмущения (вся ошибка регулирования смещается в недоотработку без увеличения ее размаха). Отсутствие переотработки, кроме того, позволяет поддерживать регулируемый параметр вблизи предельно допустимого значения. 2 ил.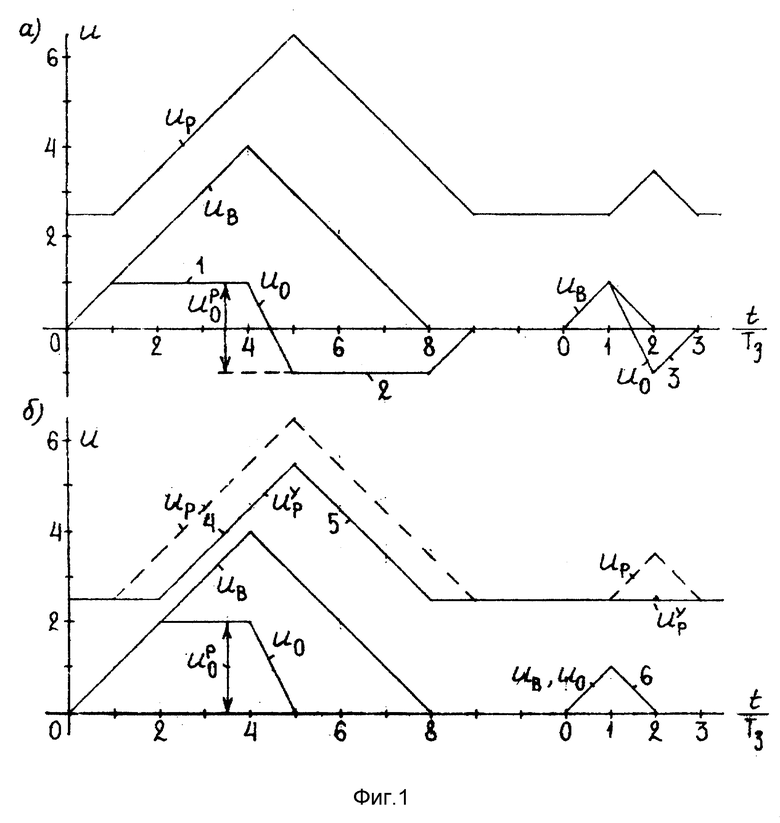
Способ предельно быстродействующего регулирования по отклонению для запаздывающего объекта, заключающийся в том, что приводят отклонения регулируемого параметра объекта от заданного значения и регулирующее воздействие в объект к единой безразмерной величине, воздействуют в объект непосредственно отклонением регулируемого параметра, добавляют к этому отклонению регулирующее воздействие, бывшее на одно запаздывание объекта ранее, отличающийся тем, что разделяют регулирующее воздействие на нарастающее и на спадающее, дополнительно задерживают нарастающее воздействие на одно запаздывание объекта форсируют спадающее воздействие до компенсации запаздывания объекта.
| Смит О.Д | |||
| М | |||
| Автоматическое регулирование, Физматгиз, 1962, с.433, рис | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Гурецкий X | |||
| Анализ и синтез систем управления с запаздыванием.-М.: Машиностроение, 1974, с | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система автоматического управления для объектов с запаздыванием | 1987 |
|
SU1534428A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ | 1989 |
|
RU2012030C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТОМ | 1988 |
|
SU1568765A1 |

