Изобретение относится к способам управления динамическими объектами и может быть использовано при разработке алгоритмов управления различными объектами и систем автоматического управления движением объектов.
Целью изобретения является уменьшение длительности переходного процесса.
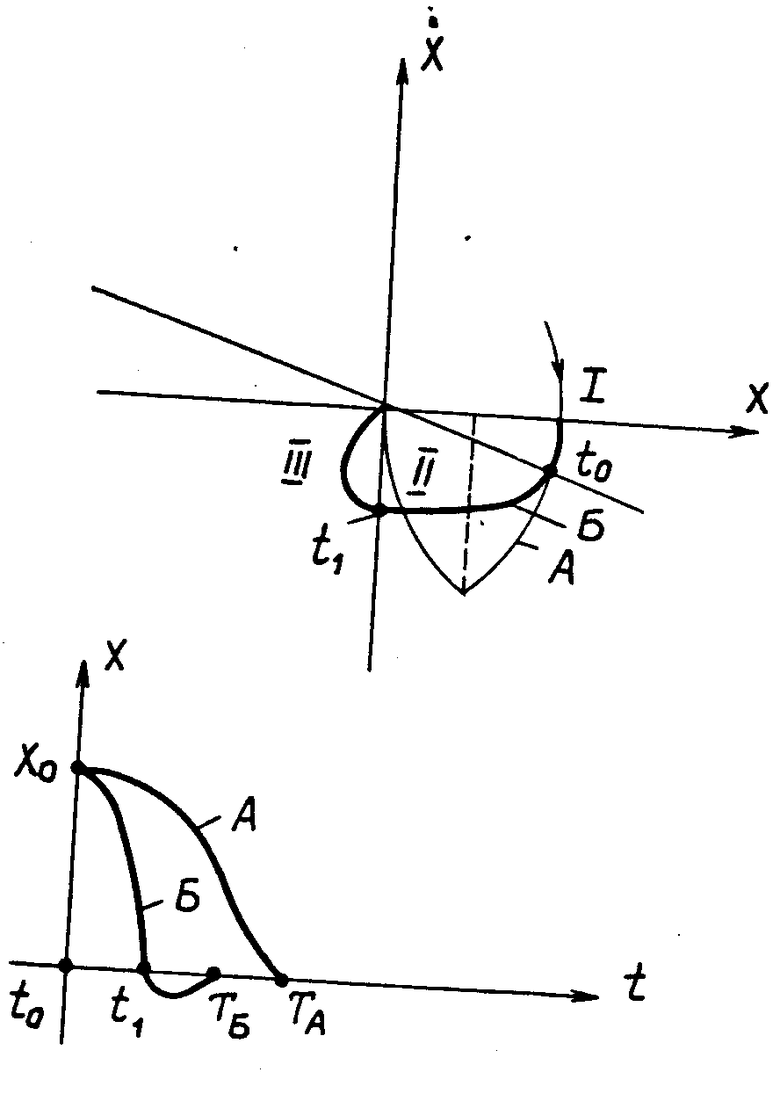
На чертеже приведен фазовый портрет системы при реализации предлагаемого способа.
Сущность предлагаемого способа заключается в следующем.
Предположим, что система находилась в состоянии покоя
X 0; X1 dx/dt 0,
где Х рассогласование системы, тогда линейная комбинация рассогласования и его скорости равна нулю
a1X + a2X' 0,
поэтому производится запоминание нулевого рассогласования и управляющий сигнал U также равен нулю.
Если в некоторый момент времени, который примем за нулевой, возникает начальное отклонение Х(0), Х(0), то в общем случае a1X(0) + a2X′(0) ≠ 0 запоминание не производится и движение происходит только под действием начальных условий, так как по-прежнему U 0. Это движение происходит до момента времени t t0, когда выполняется условие запоминания (1)
a1X(t0)+a2X′(t0) = 0.
После этого начинается второй участок движения под действием управляющего воздействия
Это управляющее воздействие поддерживается постоянным до момента t t1, когда выполнится условие переключения, т.е. до момента времени, когда значение рассогласования достигнет нуля, а значение скорости рассогласования из-за инертности системы не приняло нулевого значения.
В этот момент скачкообразно производится инвертирование управляющего сигнала, и начинается третий участок движения под действием величины
Это движение продолжается до следующего момента запоминания.
Параметр настройки коэффициенты a1, a2 при значениях величины и скорости рассогласования соответственно, которые можно выбрать так, что в указанный последующий момент запоминания t2 рассогласование Х и скорость рассогласования Х1 будут равны нулю, и будет запоминаться нулевой сигнал, т.е.
U 0.
Если динамика системы, в которой используется предлагаемое управление, описывается дифференциальным уравнением второго порядка, то, начиная с момента t2, движение системы прекратится, т.е. при t ≥ t2 X(t) X1(t) 0.
Следовательно, переходный процесс в такой системе затухает за конечный отрезок времени Т t0 + t1 + t2.
Описанное управление может быть пояснено фазовым портретом на чертеже, где А управление по прототипу, Б управление по предлагаемому способу. Из фазового портрета видно, что управление по предлагаемому способу требует меньше времени для затухания переходного процесса.
В качестве примера рассмотрим систему, описываемую уравнением
Пусть D B2 4AC > 0, тогда свободное движение системы есть
где
Момент времени t0 определяется равенством нулю линейной комбинации
Отсюда
При этом
Данное движение системы происходит по действием силы
Траектория движения определяется уравнениями

при начальных условиях Х(t0),  .
.
Отсюда определяются C ;
; 
где
Данное движение продолжается до момента времени t1, при котором рассогласование X(t) становится равным нулю
Это соотношение определяет момент времени t1.
Далее движение системы происходит под действием силы U:

при начальных условиях X(t1),  , где
, где 
(C
Отсюда определяем C ;
; 

Данное движение продолжается до момента времени t2, для которого  .
.
Следовательно, t2 определяется соотношением
Отсюда
При этом
Как видно из приведенного примера, предложенный способ управления позволяет уменьшить время переходного процесса, так как время, требуемое для погашения временного нарастания величины рассогласования в предложенном способе много меньше времени, требуемого для погашения возросшей скорости рассогласования по способу-прототипу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU435500A1 |
| Способ управления объектом | 1981 |
|
SU964573A2 |
| Способ управления зарядным устройством с импульсным принципом действия | 2023 |
|
RU2813604C1 |
| Способ управления импульсным стабилизатором напряжения | 2021 |
|
RU2764783C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ, СКОРОСТИ И УСКОРЕНИЯ ОБЪЕКТА В ПАССИВНОЙ СКАНИРУЮЩЕЙ СИСТЕМЕ ВИДЕНИЯ | 2018 |
|
RU2700275C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2200940C2 |
| Корректирующее устройство | 1983 |
|
SU1145320A1 |
| Система автоматического регулирования | 1972 |
|
SU437046A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289154C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ НЕПРЕРЫВНОЙ ПРОКАТКИ С ПЕТЛЕЙ СОРТОВОГО МЕТАЛЛА И ПРОВОЛОКИ | 1998 |
|
RU2139157C1 |
Способ автоматического управления объектом может быть использован при создании систем управления инерционными объектами, для которых требуется быстрая обработка возмущающих воздействий. Цель изобретения - уменьшение длительности переходного процесса. Цель достигается тем, что управляющее воздействие формирует пропорционально сумме значений величины и скорости рассогласования, взятых по абсолютной величине, анализируют знак рассогласования и формируют знак управляющего воздействия противоположным знаку величины рассогласования. При этом инвертирование управляющего воздействия производят в момент времени, когда величина рассогласования равна нулю, в величина скорости рассогласования не равна нулю. 1 ил.
Способ автоматического управления объектом, заключающийся в формировании управляющего воздействия в момент равенства нулю линейной комбинации величины и скорости рассогласования, запоминании в указанные моменты времени величины рассогласования и инвертировании управляющего воздействия, отличающийся тем, что, с целью уменьшения длительности переходного процесса, управляющее воздействие формируют пропорционально сумме значений величины и скорости рассогласования, взятых по абсолютной величине, анализируют знак рассогласования и формируют знак управляющего воздействия, противоположным знаку величины рассогласования, а инвертирование управляющего воздействия проводят в момент времени, когда величина рассогласования равна нулю, а величина скорости рассогласования не равна нулю.
| СПОСОБ СТАБИЛИЗАЦИИ СИСТЕМЫ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ | 0 |
|
SU283353A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU435500A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
