Изобретение относится к системам автоматического регулирования технологических параметров.
Предельное быстродействие регулирования по отклонению (по результату измерения ошибки регулирования) - это повторение регулирующим воздействием возмущения регулируемого параметра через время, равное запаздыванию объекта, когда ошибка отработки возмущения определяется только этим запаздыванием. Ослабление повторения ведет к затягиванию отработки и, следовательно, к увеличению ошибки, но за счет раскачивания колебательных возмущений. Любой регулятор способен повторить возмущение (ПИ-регулятор это делает при постоянной интегрирования, равной запаздыванию объекта, с добавлением постоянной составляющей 0,5, а "регулятор Смита" - при передаточном коэффициенте, равном единице), но только при условии предварительного приведения друг к другу (выравнивания) регулирующего воздействия и ошибки регулирования.
Однако такое выравнивание параметров входа и выхода можно выявить и установить, но весьма сложно поддерживать, если объект регулирования изменяет в широких пределах свои свойства в зависимости от многих технологических параметров. Требуется способ оперативного измерения отличия от выравненного состояния, по результату которого можно автоматически изменять усиление или ошибки (входа), или воздействия (выхода) в процессе регулирования.
Поставлена цель контролировать предельное быстродействие регулирования.
Цель достигается на основе использования для настройки известного способа [1], согласно которому размыкают пропорционально запоминающий контур прямого регулирования (ПЗ-контур) на период уменьшения отклонения регулируемого параметра (запоминая на этот период воздействие) и наблюдают за ошибкой регулирования, по результату которого изменяют коэффициент усиления. Способ основан на том, что такое размыкание равносильно размыканию обратной связи, благодаря которому регулирование практически не зависит от запаздывания объекта, но становится весьма чувствительным к передаточному коэффициенту.
Однако известный способ недостаточен для контроля процесса настройки регулирования на предельное быстродействие - он не определяет выравненное состояние.
Предлагается дополнить известный способ определением модуля ошибки регулирования и модуля регулирующего воздействия, сравнением среднего значения которых получают требуемую информацию об отличиях настройки конкретных параметров регулирования от состояния выравнивания.
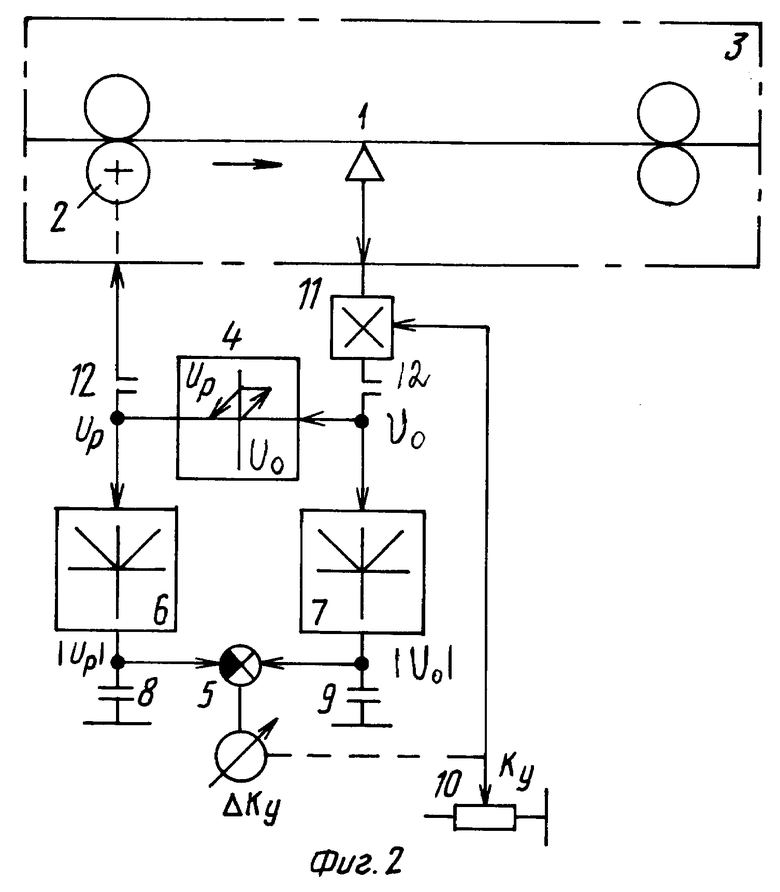
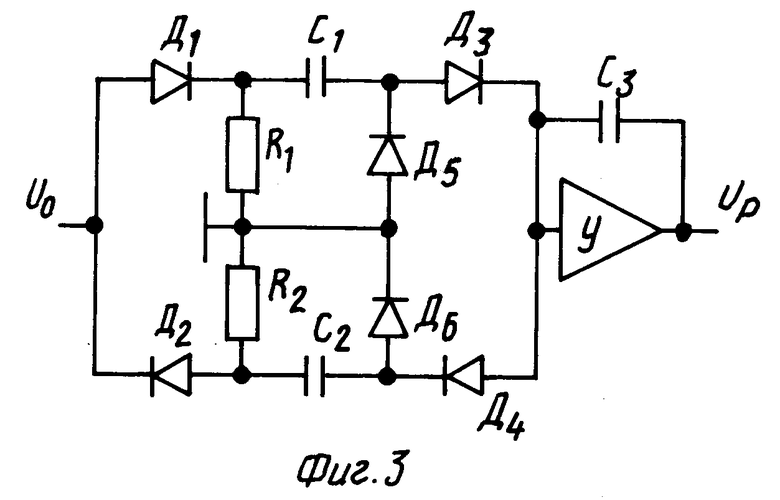
На фиг. 1 приведены осциллограммы реакции ПЗ-контура на треугольные колебания для различных его усилений. На фиг. 2 показана реализация предлагаемого способа на примере регулирования натяжения полосы воздействием на скорость валков предыдущей клети непрерывного стана холодной прокатки. На фиг. 3 показана реализация размыкания ПЗ-контура на базе операционного усиления.
Предлагаемый способ - это способ режима настройки, на который необходимо временно переключить предельно быстродействующее регулирование (ПИ-регулятор или "регулятор Смита") для выравнивания параметров входа и выхода объекта регулирования.
Сущность предлагаемого способа настройки видна из осциллограмм фиг. 1, если сравнить реакции UР ПЗ-контура на треугольное колебательное возмущение UB с оставшейся ошибкой UО для различных усилений контура: KУ = 0,5; KУ = 1,0; KУ = 1,5. Время выражено в единицах запаздывания объекта регулирования TЗ при измерении ошибки регулирования UО и регулирующего воздействия UР, а величины параметров регулирования UB, UР, UО - в приращении возмущения UB за время этого же запаздывания TЗ. На осциллограммах регулирующее воздействие UР повторяет с коэффициентом KУ нарастающую часть возмущения UB с задержкой на время запаздывания TЗ, запоминая максимальное значение на время его срабатывания (размыкая контур). Ошибка UО такого воздействия (как разность UB - UP) зависит от коэффициента усиления воздействия KУ. При KУ = 1,0 модуль ошибки |U0| в среднем равен модулю воздействия |Up|. Уменьшение усиления (например, до KУ = 0,5) в среднем увеличивает модуль ошибки за счет уменьшения модуля воздействия, а увеличение (например, до KУ = 1,5) - наоборот, в среднем уменьшает модуль ошибки за счет увеличения модуля воздействия. Под средним значением понимается низкочастотная составляющая, усредняющая ошибку и воздействие независимо от способа ее выделения. Из осциллограмм видно, что, сравнивая средние значения модулей ошибки и регулирующего воздействия ПЗ-контура, можно выявить состояние выравнивания этих параметров (KУ = 1,0) как нуль результата сравнения, а отличие от этого состояния - как отклонения от этого нуля.
Равенство ошибки воздействию не годится для регулирования, но позволяет настроить регулирование на предельное быстродействие (на равенство воздействия возмущению).
Кратковременная замена действующего, например, ПИ-регулятора на ПЗ-контур рационально осуществлять при смене режима работы объекта регулирования, если при этом нарушается выравненное состояние. Восстановление состояния выравнивания осуществляется изменением усиления регулирующего воздействия или ошибки регулирования под контролем предлагаемого способа (вручную или автоматически).
На фиг. 2 показана реализация предлагаемого способа на примере регулирования межклетевого натяжения полосы 1 воздействием на скорость валков предыдущей клети 2 непрерывного стана холодной прокатки 3 на базе пропорционально запоминающего устройства 4 [1]. Измеренное отклонение натяжения (ошибка регулирования UО) с коэффициентом KУ воздействует UР на скорость валков, но только при нарастании ошибки UО (при спадании воздействие UР запоминается). Такое воздействие на скорость полосы уменьшает нарастание натяжения в KУ раз, но с запаздыванием в стане 3 при измерении 1 и при воздействии 2. Если KУ ≠ 1, то сравнение 5 данных |Up| и |U0| измерителей модулей 6 и 7 (усредненных конденсаторами 8 и 9) отклонится от нуля. Для настройки достаточно изменить усиление KУ вручную или автоматически (условно показан потенциометр 10, действующий через умножитель 11) до состояния KУ = 1,0. Потенциометр запомнит и сохранит выравненное состояние KУ и после отключения 12 ПЗ-контура. В данном примере рационально выравнивать ошибку регулирования натяжения полосы, принимая за базу воздействие на скорость клети. Вообще-то можно и наоборот.
На фиг. 3 показана реализация [1] пропорционально запоминающего устройства на примере операционного усилителя У, действующего в режиме единичного усиления на конденсаторах (C1 = C2 = C3) раздельно по полярности входного сигнала UО, но только при заряде конденсатора C1 (или C2) через диоды Д1, Д3 (или Д2, Д4). Разряд этого конденсатора при уменьшении UО происходит через диод Д5 (или Д4) и резистор R1 (или R2), минуя усилитель У, конденсатор C3 в отрицательной обратной связи которого сохраняет при этом сигнал на его выходе UР.
Источник информации
1. А. с. 340472 от 09.03.70. "Способ экспериментального определения передаточного коэффициента объекта регулирования". Бюллетень N 18, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДЕЛЬНО БЫСТРОДЕЙСТВУЮЩЕГО РЕГУЛИРОВАНИЯ ПО ОТКЛОНЕНИЮ | 1998 |
|
RU2137170C1 |
| УСТРОЙСТВО ОГРАНИЧЕНИЯ РЕГУЛИРОВАНИЯ ТОЛЩИНЫ ПОЛОСЫ НА МНОГОКЛЕТЕВОМ НЕПРЕРЫВНОМ СТАНЕ ХОЛОДНОЙ ПРОКАТКИ | 1998 |
|
RU2156175C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТОЛЩИНЫ ПОЛОСЫ НА МНОГОКЛЕТЕВОМ СТАНЕ НЕПРЕРЫВНОЙ ХОЛОДНОЙ ПРОКАТКИ | 2000 |
|
RU2194586C2 |
| СПОСОБ ПРАВКИ ШЛИФОВАЛЬНЫХ КРУГОВ | 1992 |
|
RU2014210C1 |
| СПОСОБ ВИНТОВОЙ РЕВЕРСИВНОЙ ПРОКАТКИ СОРТОВОГО МЕТАЛЛА | 1992 |
|
RU2030932C1 |
| УСТРОЙСТВО ДЛЯ ОТРАБОТКИ КОЛЕБАНИЙ ТОЛЩИНЫ ПОЛОСЫ ПЕРВОЙ КЛЕТЬЮ НЕПРЕРЫВНОГО СТАНА ХОЛОДНОЙ ПРОКАТКИ | 2001 |
|
RU2201823C1 |
| РЕГУЛЯТОР МЕЖКЛЕТЕВОГО НАТЯЖЕНИЯ ПОЛОСЫ НА НЕПРЕРЫВНОМ СТАНЕ ХОЛОДНОЙ ПРОКАТКИ | 2001 |
|
RU2203752C2 |
| СПОСОБ ШЛИФОВАНИЯ | 1992 |
|
RU2021093C1 |
| ВЕРТЛЮГ | 1991 |
|
RU2011786C1 |
| ОПОРА ВАЛКА | 1992 |
|
RU2033871C1 |
Изобретение относится к области автоматического регулирования технологических параметров. Технический результат изобретения заключается в поддержании предельного быстродействия регулирования путем выравнивания параметров входа и выхода объекта регулирования. Способ настройки заключается в использовании контура пропорционально запоминающего регулирования, размыкающегося на время спадания отклонения регулируемого параметра, сравнении средних значений модуля ошибки регулирования и модуля регулирующего воздействия, выравнивании этих средних значений изменением коэффициента усиления одного из них и запоминании результата изменения коэффициента усиления. 3 ил.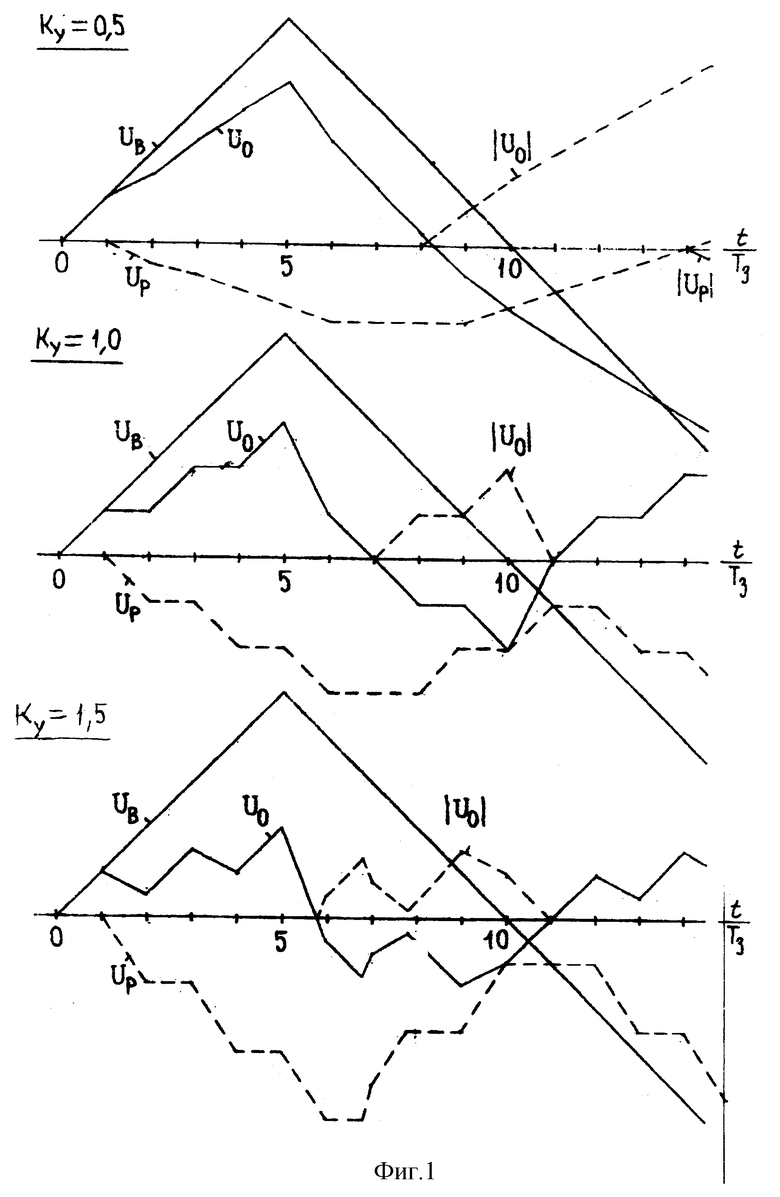
Способ настройки регулирования на действующем объекте, заключающийся в использовании контура пропорционально-запоминающего регулирования, размыкающегося на время спадания отклонения регулируемого параметра, отличающийся тем, что сравнивают средние значения модуля ошибки регулирования и модуля регулирующего воздействия, поддерживают равенство этих средних значений изменением коэффициента усиления одного из них и запоминают результат изменения коэффициента усиления.
| ВСЕСОЮЗНЛЯ 1ПА1Втно-^::хш-^:гш1 | 0 |
|
SU340472A1 |
| Система автоматического управления для объектов с запаздыванием | 1987 |
|
SU1534428A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ | 1989 |
|
RU2012030C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЭЛЕКТРИЧЕСКОГО ТОКА В ЭЛЕКТРОЛИТИЧЕСКОЙ ЯЧЕЙКЕ | 0 |
|
SU180669A1 |
