Изобретение относится к горной промышленности, в частности к манипуляторам горных машин.
Известен буровой манипулятор [1, с. 2 - 4], включающий основание, стрелу, направляющую балку, бурильную машину, приводы наведения ее в рабочее положение.
Недостатком такой конструкции является применение жесткой стрелы, которая обуславливает как изменение направления оси инструмента, так и его смещение от плоскости забоя при позиционировании, в связи с чем требуются дополнительные устройства для корректировки положения бурильной машины в рабочей зоне.
Наиболее близкой к заявляемой является конструкция бурового манипулятора [2] , выполненная в виде шарнирно-параллелограммного механизма подъема и шарнирно-параллелограммного механизма поворота, обеспечивающих поступательное движение бурильной машины в горизонтальной и вертикальной плоскостях.
Недостатком такой конструкции является то, что относительное поступательное движение вертикального шатуна манипулятора, соединенного с направляющей балкой бурильной машины, осуществляется по круговым траекториям, что обязательно приводит к отходу инструмента от плоскости забоя.
Задача изобретения состоит в исключении смещения инструмента от забоя в горизонтальной плоскости путем обеспечения поступательного движения выходного звена манипулятора в плоскостях, параллельных плоскости обуриваемой поверхности (т.е. без смещения инструмента относительно оси горной выработки), что достигается выполнением вертикального шатуна шарнирно-параллелограммного механизма подъема в виде подвижной платформы, являющейся основанием вспомогательного вертикального параллелограмма, на шатуне которого устанавливается бурильная машина, и опорой приводов подъема, при помощи которых вертикальные параллелограммы приводятся в движение независимо друг от друга.
Сущность изобретения заключается в том, что буровой манипулятор, состоящий из шарнирно-параллелограммного механизма поворота и шарнирно-параллелограммного механизма подъема, направляющей балки с закрепленной на ней бурильной машиной, привода поворота в горизонтальной плоскости и привода подъема в вертикальной плоскости, снабжен вспомогательным вертикальным параллелограммом, на шатуне которого установлена направляющая балка, и вторым приводом подъема, обеспечивающим движение вспомогательного вертикального параллелограмма, а вертикальный шатун шарнирно-параллелограммного механизма подъема выполнен в виде жесткой платформы, являющейся основанием вспомогательного вертикального шарнирного параллелограмма и опорой приводов подъема. Предлагаемая конструкция обеспечивает движение бурильной машины вдоль плоскости, параллельной плоскости забоя, путем определенного управления приводами шарнирно-параллелограммного механизма подъема и вспомогательного вертикального параллелограмма, движущихся независимо друг от друга.
На чертеже показана схема бурового манипулятора.
Манипулятор содержит основание 1, неподвижно соединенное с механизмом хода бурового агрегата, шарнирно-параллелограммный механизм поворота с ребрами 2 и 3 и шатуном 4, соединенный с шарнирно-параллелограммным механизмом подъема с ребрами 5 и 6 и вертикальным шатуном, выполненным в виде подвижной платформы 7, которая является основанием вспомогательного вертикального параллелограмма с ребрами 8 и 9 и шатуном 10, на котором установлена направляющая балка 11 с бурильной машиной 12. Манипулятор снабжен приводами 13, 14 и 15, выполненными в виде гидроцилиндров. Приводы подъема 14 и 15 установлены на подвижной платформе 7.
Манипулятор работает следующим образом.
После установления бурового агрегата в месте проведения буровых работ последовательно включаются привод 13 поворота стрелы в горизонтальной плоскости, а затем приводы 14 и 15, установленные на платформе 7 и обеспечивающие подъем стрелы в вертикальной плоскости. При этом за счет работы параллелограммов в составе шарнирно-параллелограммного механизма поворота, шарнирно-параллелограммного механизма подъема и вспомогательного шарнирного параллелограмма направляющая балка 11 устанавливается в заданное положение параллельно своему исходному положению, а совместным управлением приводами 13, 14 и 15 достигается перемещение бурового инструмента в плоскости, параллельной плоскости обуриваемой поверхности.
Литература
1. Дворников Л.Т., Давыдов А.П. Манипуляторы буровых агрегатов. Обзор. Серия "Механизация производства, эксплуатация и ремонт оборудования в цветной металлургии". Вып. 2. - М.: Министерство цветной металлургии СССР, ЦНИИцветмет экономики и информ., 1987, с. 2-4.
2. Авторское свидетельство СССР N 1209844, кл. E 21 C 11/02, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУРОВОЙ МАНИПУЛЯТОР | 1998 |
|
RU2143067C1 |
| МАНИПУЛЯТОР ДЛЯ БУРИЛЬНОЙ МАШИНЫ | 2020 |
|
RU2764881C2 |
| БУРОВОЙ МАНИПУЛЯТОР | 2003 |
|
RU2242578C1 |
| Горная машина | 1986 |
|
SU1448041A1 |
| Самоходный полок для проходки восстающих выработок | 1983 |
|
SU1164424A1 |
| БУРОВОЙ МАНИПУЛЯТОР | 1994 |
|
RU2083820C1 |
| ВРАЩАТЕЛЬНАЯ БУРИЛЬНАЯ МАШИНА | 1998 |
|
RU2143066C1 |
| Устройство для бурения шпуров | 1980 |
|
SU898053A1 |
| Буропогрузочная машина | 1976 |
|
SU607053A1 |
| КРЕПЕУСТАНОВЩИК | 1995 |
|
RU2078935C1 |
Изобретение относится к горной промышленности. Буровой манипулятор включает шарнирно-параллелограммный механизм поворота, шарнирно-параллелограммный механизм подъема с вертикальным шарниром, направляющую балку с бурильной машиной и приводы поворота и подъема. Снабжен вспомогательным вертикальным параллелограммом, на шатуне которого закреплена направляющая балка, и вторым приводом подъема. Вертикальный шатун шарнирно-параллелограммного механизма подъема выполнен в виде подвижной платформы, служащей основанием для вспомогательного параллелограмма, работающего независимо от шарнирно-параллелограммного механизма подъема. Подвижная платформа служит также опорой для приводов подъема стрелы. Позволяет исключить смещение инструмента от забоя в горизонтальной плоскости путем обеспечения поступательного движения выходного звена манипулятора в плоскостях, параллельных плоскости обуриваемой поверхности. 1 ил.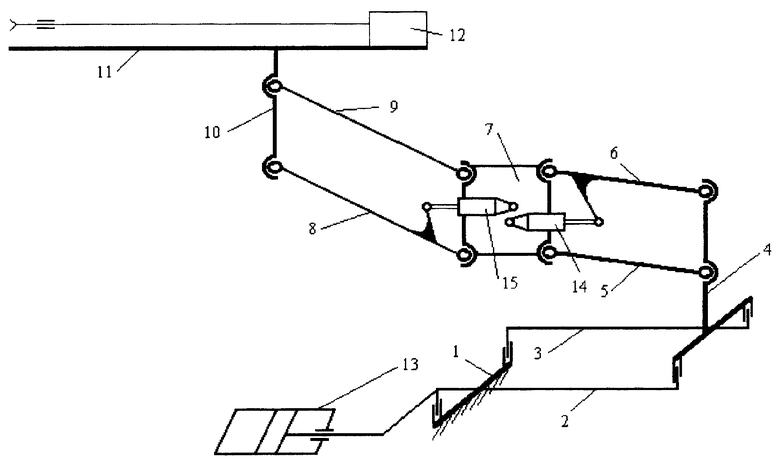
Буровой манипулятор, включающий шарнирно-параллелограммный механизм поворота, шарнирно-параллелограммный механизм подъема с вертикальным шарниром, направляющую балку с бурильной машиной и приводы поворота и подъема, отличающийся тем, что он снабжен вспомогательным вертикальным параллелограммом, на шатуне которого закреплена направляющая балка, и вторым приводом подъема, а вертикальный шатун шарнирно-параллелограммного механизма подъема выполнен в виде подвижной платформы, служащей основанием для вспомогательного параллелограмма, работающего независимо от шарнирно-параллелограммного механизма подъема, и опорой для приводов подъема стрелы.
| Манипулятор для бурильных машин | 1984 |
|
SU1209844A1 |
| Манипулятор для бурильных машин | 1981 |
|
SU1023080A1 |
| БУРОВОЙ МАНИПУЛЯТОР | 1994 |
|
RU2083820C1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| Дворников Л.Т | |||
| и др | |||
| Манипуляторы буровых агрегатов | |||
| Обзор | |||
| Серия "Механизация производства, эксплуатация и ремонт оборудования в цветной металлургии" | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М.: Минцветмет СССР, ЦНИИцветмет экономики и информации, 1987, с.2 - 4. | |||
