Гравитационный движитель относится к области машиностроения и может быть использован для осуществления направленного движения или строго дозированного дискретного перемещения в пространстве при малом трении-сопротивлении внешней среды.
Известен гравитационный движитель [1], выбранный заявителем за прототип, содержащий рабочее тело, установленное на основании с возможностью его прямого и обратного перемещения в плоскости основания из положения x21 (1 в положение x21 (2 посредством размещенного на основании приводного устройства реверсивного типа.
Недостатком прототипа является невозможность его самоадаптации к изменению трения-сопротивления внешней среды в реальном масштабе времени.
Возможность создания гравитационного движителя была достигнута благодаря тому, что в результате теоретических исследований и эксперимента [1] было установлено, что любое внутреннее взаимодействие частей замкнутой механической системы возбуждает ее собственное динамическое гравитационное поле, оказывающее на нее действие, эквивалентное внешнему.
На основе этой закономерности было теоретически обосновано и экспериментально подтверждено [1], что в диссипативной среде полное дискретное смещение механической системы как целого, складывающееся из ее начального смещения, вызванного действием на нее ее собственного динамического гравитационного поля, возбуждаемого взаимодействием ее частей, и ее последующего смещения, являющегося результатом ее затухающего движения как целого по завершению взаимодействия ее частей, для любых 0<γ≤∞, удовлетворяющих условию 2γ/ω≥1, остается постоянным, где γ-коэффициент затухания движения механической системы как целого; ω - круговая частота взаимодействия ее частей.
В качестве примера рассмотрим механическую систему S, показанную на фиг. 1. Она содержит основание массой m1, на котором посредством идеальных цилиндрических шарниров и стержней R длиной R21 закреплены два тела равной массы m2. Цилиндрические шарниры связаны между собой идеальной кинематической связью, которая обеспечивает синхронное встречное вращательное движение тел m2 плоскости основания m1.
Гравитационный анализ рассматриваемой механической системы S включает:
1. Выбор основной и вспомогательных систем отсчета, а также независимых обобщенных координат, которые бы наиболее просто описывали состояние механической системы в выбранных системах отсчета в любой момент времени.
2. Нахождение функции Лагранжа механической системы и определение ее полной энергии в какой-либо из выбранных систем отсчета.
3. Анализ взаимодействия, заключающийся в составлении и интегрировании уравнений движения частей механической системы, совершающих движение в силовом поле их взаимодействия.
4. Анализ самодействия, заключающийся в составлении и интегрировании уравнений движения механической системы как целого и отдельно ее частей, совершающих вынужденное движение в ее собственном динамическом гравитационном поле, возбуждаемым взаимным инерционным действием ее частей друг на друга при их взаимодействии.
5. Анализ последействия, заключающийся в составлении и интегрировании уравнений движения механической системы как целого по завершению взаимодействия ее частей.
Выберем в качестве основной абсолютную K, а в качестве вспомогательной относительную K0(γ1) системы отсчета так, что при γ1≠ 0 и v1n = 0 начало O и O0 декартовых координат Oxy и O0x0y0 этих систем отсчета определено начальным положением основания m1 в момент времени t = 0, как показано на фиг. 1, где γ1 - коэффициент затухания начальной абсолютной скорости v1n поступательного движения основания m1. При γ1= 0 начало O0 декартовых координат O0x0y0 системы отсчета K0(0) определено начальным положением центра Oc масс механической системы S в момент времени t = 0. Кроме того, введем собственную систему отсчета K1 основания m1 с декартовыми координатами О1x1y1, в которой положение тел m2 определено радиус-векторами R21. Эту систему отсчета, как и систему отсчета K0(γ1), примем за вспомогательную.
В качестве обобщенных координат выберем декартовы координаты x10, x20 и y20 основания m1 и тел m2 в системе отсчета K0(0) и полярную координату ϕ21 тел m2 в системе отсчета K1. Тогда кинетическую энергию T10 поступательного движения основания m1 в системе отсчета K0(0) можно определить как
где  - его обобщенная декартова скорость; ▿t= d/dt - оператор дифференцирования по времени t.
- его обобщенная декартова скорость; ▿t= d/dt - оператор дифференцирования по времени t.
Кинетическую энергию T20 вращательного движения тел m2 в этой же системе отсчета K0(0) можно определить по их обобщенным координатам
как
где  и
и  - их обобщенные декартовы и полярная скорости в системах отсчета K0(0) и K1; R21 - модуль радиус-векторов R21; m2=2m2 - удвоенная масса тела m2, что позволяет исключить одно из этих тел, например нижнее, из рассмотрения при дальнейшем анализе.
- их обобщенные декартовы и полярная скорости в системах отсчета K0(0) и K1; R21 - модуль радиус-векторов R21; m2=2m2 - удвоенная масса тела m2, что позволяет исключить одно из этих тел, например нижнее, из рассмотрения при дальнейшем анализе.
С учетом (1) и (3) функцию Лангража L0 механической системы S в системе отсчета K0(0) можно выразить как
LO = TSOx + T21 - G - U,
где TSOx - кинетическая энергия поступательного движения механической системы S как целого в системе отсчета K0(0)
T21 - кинетическая энергия вращательного движения тела m2 в системе отсчета K1
G - обобщенный гравитационный потенциал
выраженный через обобщенные координаты R21, ϕ21 и скорости 
 и последнее слагаемое U - потенциал взаимодействия тела m2 с основанием m1, подлежащий дальнейшему определению.
и последнее слагаемое U - потенциал взаимодействия тела m2 с основанием m1, подлежащий дальнейшему определению.
Полную энергию W0 механической системы S в системе отсчета K0(0) определим через ее функцию Лагранжа L0 (4)
где  - компоненты обобщенного импульса, включающие компоненту обобщенного поступательного импульса pSOx механической системы S как целого и компоненту обобщенного вращательного импульса p21 тела m2
- компоненты обобщенного импульса, включающие компоненту обобщенного поступательного импульса pSOx механической системы S как целого и компоненту обобщенного вращательного импульса p21 тела m2
в системах отсчета K0(0) и K1, выраженные через обобщенные скорости 
Подставив в (8) функцию Лагранжа L0 (4), получим
При определении потенциала U будем исходить из того, что в функции Лагранжа L0 (10) обобщенная координата x10 циклическая ∂L/∂x10= 0. Поэтому сохраняется обобщенный импульс  совпадающий горизонтальной компонентой полного поступательного импульса механической системы S
совпадающий горизонтальной компонентой полного поступательного импульса механической системы S
PSOx = PCOx = pSOx - pGOx = const,
где  и xс0 - обобщенные поступательный импульс и декартовы скорость и координата ее центра Oc масс в системе отсчета K0(0);
и xс0 - обобщенные поступательный импульс и декартовы скорость и координата ее центра Oc масс в системе отсчета K0(0);  - обобщенный горизонтальный импульс ее собственного динамического гравитационного поля
- обобщенный горизонтальный импульс ее собственного динамического гравитационного поля
возбуждаемого инерционным Φ21x действием тела m2 на основание m1 при их гармоническом взаимодействии;  - его амплитуда.
- его амплитуда.
Из (11) при γ1= 0 и v1n = 0, когда const=0, нетрудно определить обобщенную координату x10 основания m1 в системе отсчета K0(0)
x10= -A10(0)cosϕ21, (13)
где A10(0)= kR21 - амплитуда его возвратно-поступательного движения; k= m2/(m1+m2) - постоянный коэффициент.
Дифференцирование (13)  по времени t с последующей подставкой в (10) позволяет выразить функцию Лагранжа L1 и полную энергию W1 механической системы S в системе K1 в виде
по времени t с последующей подставкой в (10) позволяет выразить функцию Лагранжа L1 и полную энергию W1 механической системы S в системе K1 в виде
Полагаем, что функция потенциала U (14) имеет квадратичную форму
где χ(ϕ21) - неизвестная функция, удовлетворяющая граничным условиям вида
χ = ES/Rp - коэффициент, зависящий от упругих свойств и геометрических размеров стержня R, а именно от его модуля Юнга E, от площади S=2S его поперечного сечения, удвоенной как и масса m2 = 2m2 тела m2 (3), а также от его предельной длины Rp, превышение которого для вращательного движения тела m2 вокруг неподвижной оси O1 при  , приводит к его деформированному приращению ΔR21.
, приводит к его деформированному приращению ΔR21.
Продифференцировав функцию Лагранжа L1 (14) по R21 и сопутствующую ей полную энергию W1 по времени t при  получим систему уравнений
получим систему уравнений
первое из которых выражает принцип д'Аламбара, а второе - закон сохранения энергии.
Системе уравнений (17) и граничным условиям (16) удовлетворяет функция
χ(ϕ21) = χ(1-ksin2ϕ21). (18)
Подстановка (18) в (15) позволяет определить потенциал
как функцию от обобщенных координат ϕ21 и R21.
Для анализа взаимодействия воспользуемся функцией Лагранжа L1 (14), сводящей задачу о движении тела m2 и основания m1 к задаче одного тела с переменной приведенной инертной массой
движущегося в силовом поле F21= ∂U/∂R21 взаимодействия тела m2 с основанием m1 при 
Так как неинерциальность собственной системы отсчета K1 основания m1, вызванную действием на него динамического гравитационного поля F10x (12), можно отнести к изменению приведенной инертной массы  (20), то центр силового поля F21, находящийся в начале O1 координат O1x1y1 системы отсчета K1, можно условно принять за неподвижный.
(20), то центр силового поля F21, находящийся в начале O1 координат O1x1y1 системы отсчета K1, можно условно принять за неподвижный.
Учитывая, что значение функции Лагранжа L1 (14) не зависит от обобщенной координаты ϕ21, примем эту координату за циклическую ∂L/∂ϕ21= 0. Тогда при γ1≠ 0 вращательная часть движения в системе отсчета K1 будет удовлетворять следующему уравнению Лагранжа
где D - диссипативная функция Релея, которая при подстановке в нее обобщенной скорости  (13) примет вид
(13) примет вид
μ1 - коэффициент сопротивления внешней среды поступательному движению основания m1; M21 - внутренний активный вращающий момент, действующий на оси O1.
Подставив в (21) функцию Лагранжа L1 (14) и одновременно диссипативную функцию D (22), выраженную через обобщенную скорость  после дифференцирования получим следующее линейное неоднородное дифференциальное уравнение второго порядка:
после дифференцирования получим следующее линейное неоднородное дифференциальное уравнение второго порядка:
где γ2= μ1m1/[2m1+m2)2] - коэффициент затухания вращательного движения тела m2; η и ν - коэффициенты, зависящие от обобщенной координаты ϕ21
Поскольку в исходной функции Лагранжа L1 (14) обобщенная координата ϕ21 принята за циклическую ∂L/∂ϕ21= 0, то ее необходимо исключить из уравнения (23) посредством усреднения по η и ν
Усреднение по η и ν сводит уравнение (23) к линейному дифференциальному уравнению второго порядка с постоянными коэффициентами
В стационарном состоянии  и из (26) для внутреннего активного вращающего момента M21 на оси O1 получим
и из (26) для внутреннего активного вращающего момента M21 на оси O1 получим
В случае M21 = 0 неоднородное уравнение (26) переходит в однородное
Подстановка ϕ21= exp(λt) сводит уравнение (28) к характеристическому уравнению
с корнями
Общее решение однородного уравнения (28) с известными корнями λ1,2 (30) будем искать в виде
Приняв в (31) ϕ21= ϕ
B1 + B2 = 0
где ϕ
Продифференцировав (31) по t, получим
Приняв в (33)  при t = 0, а затем подставив полученное выражение в (32), найдем
при t = 0, а затем подставив полученное выражение в (32), найдем
где  - обобщенная скорость тела m2 в момент времени t = 0.
- обобщенная скорость тела m2 в момент времени t = 0.
Приняв в (33)  а затем выполнив логарифмирование, определим длительность
а затем выполнив логарифмирование, определим длительность
затухания обобщенной скорости  вращательного движения тела m2 в n раз.
вращательного движения тела m2 в n раз.
Для анализа прямого самодействия воспользуемся функцией Лагранжа L0 (10). Поскольку в ней обобщенная координата x10 циклическая ∂L/∂x10= 0, то при γ1≠ 0 поступательная часть движения в системе отсчета K0(γ1) должна удовлетворять следующему уравнению Лагранжа
Подставив в это уравнение функцию Лагранжа L0 (10) и диссипативную функцию D (22), выраженную через обобщенную скорость  после дифференцирования получим следующее линейное неоднородное дифференциальное уравнение второго порядка
после дифференцирования получим следующее линейное неоднородное дифференциальное уравнение второго порядка
где γ1= μ1/[2(m1+m2)] - коэффициент затухания вынужденного поступательного движения основания m1;  - коэффициент, пропорциональный амплитуде H21 динамического гравитационного поля F10x (12).
- коэффициент, пропорциональный амплитуде H21 динамического гравитационного поля F10x (12).
Полученное уравнение прямого самодействия (37) описывает вынужденное поступательное движение основания m1 механической системы S под действием ее собственного динамического гравитационного поля F10x (12), возбуждаемого инерционным Φ21x действием ее тел m2 на основание m1 при их гармоническом взаимодействии в системе отсчета K0(γ1).
Приравнивание его правой части нулю сводит его к однородному дифференциальному уравнению последействия
описывающему поступательное движение механической системы S как целого по завершению стационарного гармонического взаимодействия тела m2 с основанием m1.
Общее решение уравнений прямого самодействия (37) и последействия (38) будем искать в виде
где x10 = x10(0≤t≤t1) и x10=x10(t1≤t≤t2) - частные решения уравнения прямого самодействия (37) для переходного и стационарного гармонического взаимодействия тела m2 с основанием m1; x10(t2≤t≤∞) - общее решение уравнения последействия (38); t1 и t2 - моменты времени t, определяющие завершение переходного и стационарного гармонического взаимодействия тела m2 с основанием m1.
Для отыскания стационарного частного решения x10= x10(t1≤t≤t2) (39) уравнения прямого самодействия (37) представим это уравнение в комплексной форме
Частный интеграл такого комплексного уравнения ищем в виде
Подставив (41) в (40), найдем комплексную амплитуду
которую в показательной форме представим как
B10(γ1) = A10(γ1)exp(iε), (43)
где A10(γ1) и ε - ее модуль и аргумент
С учетом того, что действительная и мнимая часть комплексной амплитуды B10(γ1) (42) отрицательны аргумент ε (44), определяющий запаздывание фазы  вынужденного возвратно-поступательного движения основания m1 относительно фазы
вынужденного возвратно-поступательного движения основания m1 относительно фазы  вынуждающего динамического гравитационного поля F10x (12), может быть выражен через главное значение арктангенса как
вынуждающего динамического гравитационного поля F10x (12), может быть выражен через главное значение арктангенса как
где знак (-) для правого, а знак (+) для левого вращательного движения тела m2.
Подставив (43) в (41) и выделив действительную часть, получим стационарное частное решение уравнения прямого самодействия (37) в окончательном виде
где f(γ1) функция
определяющая положение начала 00 координат O0x0y0 системы отсчета K0(0) в момент времени t = 0 относительно системы отсчета K0(γ1).
Полагая, что в исходной механической системе S при встречном повороте тел m2 на угол  , их кинетическая энергия T21 (6) преобразуется в их внутреннюю тепловую энергию в результате их абсолютно неупругого встречного удара длительность стационарного гармонического взаимодействия тела m2 с основанием m1, определим как
, их кинетическая энергия T21 (6) преобразуется в их внутреннюю тепловую энергию в результате их абсолютно неупругого встречного удара длительность стационарного гармонического взаимодействия тела m2 с основанием m1, определим как
τ2= t2-t1, (48)
где момент времени t2 = T/2, для которого угол ϕ21 поворота тела m2 в системе отсчета K1 и его перемещение Δx21 вдоль ее координатной оси O1x1 составляют ϕ21= ω21t2= π и Δx21= x - период и угловая скорость вращательного движения тела m2.
- период и угловая скорость вращательного движения тела m2.
Для определения момента времени t1 (48) найдем переходное частное решение x10=x10(0≤t≤t1) (39) уравнения прямого самодействия (37)
где ε(t) - неизвестная временная функция
ε(t) = ϕ
запаздывания фазы  вынужденного поступательного движения основания m1 относительно фазы
вынужденного поступательного движения основания m1 относительно фазы  вынуждающего динамического гравитационного поля F10x (12).
вынуждающего динамического гравитационного поля F10x (12).
Приняв в (49) x10 = x10 (0 = 0 при t = 0, найдем начальную фазу ϕ
ϕ
где x10 (0 - обобщенная координата основания m1 в момент времени t = 0.
Для определения момента времени t1 подставим (49) в (37). После чего, приняв в полученном выражении ε(t) = ε = const, найдем, что
Согласно (52) функция ε(t) достигает своего стационарного значения ε (44) в момент времени
t1 = T/4, (53)
для которого угол поворота тела m2 в системе отсчета K1 составляет ϕ21= ω21t1= π/2.
Момент времени t1 (53) определяет длительность переходного поступательного движения основания m1 как
τ1= t1. (54)
Приравняв (44) и (50) при t=t1 после логарифмирования, найдем константу
Для отыскания общего решения x10(t2≤t≤∞) уравнения последействия (38) сведем его подстановкой x10= exp(λt) к характеристическому уравнению
λ2+2γ1λ = 0 (56)
с корнями
λ1,2= 0, -2γ1. (57)
Общее решение уравнения последействия (38) с известными корнями λ1,2 (57) будем искать в виде
где t'=t-t2 - текущее время в интервале времени t2≤t≤∞ при условии того, что за начало отсчета времени выбран момент времени t=t2.
Приняв в (58) x10=x10 (2 при t=t2, найдем
x10 (2 = C1 + C2
где x10 (2 - обобщенная координата основания m1 в момент времени t2.
Продифференцировав (58) по t', получим
Приняв в (60)  при t=t2, а затем подставив полученное выражение в (59), найдем
при t=t2, а затем подставив полученное выражение в (59), найдем
где  - обобщенная скорость основания m1 в момент времени t2.
- обобщенная скорость основания m1 в момент времени t2.
Приняв в (60)  а затем выполнив логарифмирование, найдем длительность
а затем выполнив логарифмирование, найдем длительность
затухания обобщенной скорости  поступательного движения основания m1 в n раз.
поступательного движения основания m1 в n раз.
Объединение частных решений (49) и (46) уравнения прямого самодействия (37) и общего решения (58) уравнения последействия (38) дает общее решение задачи прямого самодействия с последействием в виде
Согласно (47) при γ1≠ 0 функция f(γ1) = 0 и, следовательно, начало O0 координат системы отсчета K0(γ1) определено начальным положением основания m1 в момент времени t=0, как показано на фиг. 1. В этой системе отсчета в интервале времени 0≤t≤t1 длительностью τ1 (54) основание m1 совершает вынужденное переходное поступательное движение  с постоянной амплитудой A10(γ1) (44), при котором запаздывание его фазы
с постоянной амплитудой A10(γ1) (44), при котором запаздывание его фазы  относительно фазы
относительно фазы  вынуждающего динамического гравитационного поля F10x (12) изменяется во времени t как функция ε(t) (50), где x10(0≤t≤t1) - первое решение (63). Характер изменения обобщенной координаты x10(0≤t≤t1) и запаздывания ε(0≤t≤t1) для фиксированных значений γ1 показан графиками на фиг. 1.
вынуждающего динамического гравитационного поля F10x (12) изменяется во времени t как функция ε(t) (50), где x10(0≤t≤t1) - первое решение (63). Характер изменения обобщенной координаты x10(0≤t≤t1) и запаздывания ε(0≤t≤t1) для фиксированных значений γ1 показан графиками на фиг. 1.
В интервале времени t1≤t≤t2 длительностью τ2 (48) основание m1 совершает вынужденное стационарное возвратно-поступательное движение  с постоянными во времени t амплитудой A21(γ1) и запаздыванием ε (44), зависящими от соотношения 2γ1/ω21, где x10(t1≤t≤t2) - второе решение (63).
с постоянными во времени t амплитудой A21(γ1) и запаздыванием ε (44), зависящими от соотношения 2γ1/ω21, где x10(t1≤t≤t2) - второе решение (63).
И в последнем интервале времени t2≤t≤∞ с бесконечной длительностью τ3 → ∞ (62) основание m1 совершает затухающее поступательное движение  где x10(t2≤t≤∞) - третье решение (63).
где x10(t2≤t≤∞) - третье решение (63).
На практике бесконечная длительность τ3 → ∞ при n → ∞ (62) наблюдается только при γ1= 0, а именно тогда, когда не проявляются побочные динамические эффекты внешних сред, не уточненые в формуле (62). Так, например, длительность последействия на поверхности воды и в воздухе для механической системы S общей массой около 0,5 кг и ω21≈ 6,28-3,14 составляет τ3≈ 0,2-0,5 и 3-5 с соответственно. Поэтому при γ1≠ 0 длительность прямого самодействия с последействием конечна τ = τ1+τ2+τ3, хотя и при γ1 → 0 может достигать значительной величины.
При γ1= 0 функция f(γ1) = kR21 и, следовательно, можно перейти к системе отсчета K0 (0), начало O0 координат которой определено начальным положением центра Oc масс механической системы S в момент времени t = 0. В этой системе отсчета в интервале времени 0≤t≤∞ основание m1 совершает стационарное возвратно-поступательное движение  с постоянными во времени t амплитудой A21(0)=kR21 и сдвигом фаз ε = ∓π (44), где x10(0≤t≤∞) - второе решение (63) при условии того, что в этой системе отсчета функция f(γ1) = 0.
с постоянными во времени t амплитудой A21(0)=kR21 и сдвигом фаз ε = ∓π (44), где x10(0≤t≤∞) - второе решение (63) при условии того, что в этой системе отсчета функция f(γ1) = 0.
Траектории вращательного движения тела m2 в системах отсчета K0(0,γ1) могут быть определены подставкой (63) в (2). В частности для стационарного возвратно-поступательного движения основания m1 они представляют собой эллипсы S2 (0) и S2(γ1), последний из которых показан на фиг. 1 пунктиром.
Для анализа движения механической системы S как целого, а именно движения ее центра Oc масс, подставим второе решение (63) в третье. В результате чего при t → ∞ и  получим
получим
Согласно (64) конечная обобщенная координата x , когда ε = ∓3π/4 (45), так и при γ1→ ∞, когда A10(γ1)→0 (44). Учитывая, что обобщенная скорость
, когда ε = ∓3π/4 (45), так и при γ1→ ∞, когда A10(γ1)→0 (44). Учитывая, что обобщенная скорость  (63) затухающего поступательного движения основания m1 не может принимать отрицательных значений, граничные условия (64) можно свести к виду
(63) затухающего поступательного движения основания m1 не может принимать отрицательных значений, граничные условия (64) можно свести к виду
2γ1/ω21≥1. (65)
При выполнении условия (65) конечная обобщенная координата
x прямого самодействия с последействием можно определить как
прямого самодействия с последействием можно определить как
где  и
и  - его смещение за время
- его смещение за время  прямого самодействия и время
прямого самодействия и время  последействия в отдельности
последействия в отдельности
xсо (0, xсо (2 и x
x10 (2 - обобщенная координата основания m1. которую можно определить из второго решения (63) при t=t2.
Таким образом, в диссипативной D (22) среде полное дискретное смещение ΔxCO= 2kR21 (66) центра Oc масс механической системы S в системе отсчета K0(γ1) за время  прямого самодействия с последействием при условии 2γ1/ω21≥1 (65) для любых 0<γ1≤∞ остается постоянным.
прямого самодействия с последействием при условии 2γ1/ω21≥1 (65) для любых 0<γ1≤∞ остается постоянным.
Уравнение самодействия (37) может быть проинтегрировано и для постоянного по амплитуде гравитационного поля 

возбуждаемого инерционным Φ21x действием тела m2 на основание m1 при их линейном взаимодействии, где  - обобщенное ускорение тела m2 в системе отсчета K1.
- обобщенное ускорение тела m2 в системе отсчета K1.
Поскольку в результате такого линейного взаимодействия тело m2 совершает в системе отсчета K1 обратное поступательное перемещение из положения x21 (2 в исходное положение x21 (1 на расстояние Δx21= x
Выбрав за начало отсчета времени момент времени t=t2 и выполнив интегрирование уравнения обратного самодействия (69), найдем обобщенную скорость  основания m1 в системе отсчета K0(γ1)
основания m1 в системе отсчета K0(γ1)
где  и x10 (2 - его начальные обобщенные скорость и координата, которые можно определить из второго решения (63) при t=t2; t'=t-t2 - текущее время в интервале времени t2≤t≤t3; t3 - момент времени, определяющий завершение обратного самодействия по окончании перемещения тела m2 в исходное положение x2 (1, подлежащий дальнейшему определению.
и x10 (2 - его начальные обобщенные скорость и координата, которые можно определить из второго решения (63) при t=t2; t'=t-t2 - текущее время в интервале времени t2≤t≤t3; t3 - момент времени, определяющий завершение обратного самодействия по окончании перемещения тела m2 в исходное положение x2 (1, подлежащий дальнейшему определению.
Интегрируя (70), найдем обобщенную координату x10 основания m1 в этой же системе отсчета K0(γ1)
Длительность τ4 обратного самодействия можно определить как
откуда
t3= t2+τ4. (73)
Выбрав за начало отсчета времени момент времени t=t3 и объединив третье решение (63) с решением (71), найдем общее решение укороченного последействия.
x10(t) = x
где x10 (3, C1 (3 и C2 (3 - начальная обобщенная координата основания m1 и коэффициенты
которые можно определить из (71) и (61) при  - его обобщенная скорость в этот же момент времени
- его обобщенная скорость в этот же момент времени  t' = t-t3 - текущее время в интервале времени t3≤t≤∞.
t' = t-t3 - текущее время в интервале времени t3≤t≤∞.
Полное дискретное смещение ΔxCO центра Oс механической системы S в системе отсчета K0(γ1) за время  прямого и обратного самодействий с укороченным последействием можно определить как
прямого и обратного самодействий с укороченным последействием можно определить как
где  и
и  - смещение центра Oc масс за время
- смещение центра Oc масс за время  прямого самодействия и время
прямого самодействия и время  обратного самодействия с укороченным последействием в отдельности
обратного самодействия с укороченным последействием в отдельности
xсо (0, xсо (2 и x
x10 (0, x10 (2 и x
График полного смещения центра Oс масс механической системы S как функции от γ1 показан на фиг. 1. При γ1 → 0 полное смещение центра масс ΔxCO (76) в системе отсчета K0(γ1) экспериментально приближается к величине ΔxCO → 2kR21. При γ1= 0 наблюдается инверсия, при которой его величина в системе отсчета K0 (0) составляет ΔxCO= 0.
В случае, когда прямое и обратное самодействия совершаются непрерывно во времени t с укороченным последствием, результирующее дискретное смещение ΔxS механической системы S как целого в системе отсчета K может быть определено как
ΔxS= nΔxCO, (79)
где n - кратность их повторения к некоторому моменту времени t;
ΔxCO - полное смещение ее центра Oс масс (76) в системе отсчета K0(γ1).
Если же они совершаются без ускоренного последействия, то скорость  механической системы S как целого в этой же системе отсчета K составит
механической системы S как целого в этой же системе отсчета K составит
где  - предельная скорость основания m1; h21- коэффициент (37).
- предельная скорость основания m1; h21- коэффициент (37).
Таким образом, многократное полное смещение ΔxCO → 2kR21 (76) центра Oс масс механической системы S при малом 0<γ1≪ ∞ вызывает ее эффективное гравитационное движение ΔxS (79) или  (80).
(80).
Практика показывает, что уравнение прямого самодействия (37) справедливо не только для вращательного, но и для возвратно-поступательного движения тела m2, если только последнее совершается по гармоническому закону, удовлетворяющему правой части этого уравнения. Эквивалентность этих движений позволяет заменить вращательное движение тела m2 на возвратно-поступательное, что имеет огромное практическое значение для выбора оптимальной конструкции гравитационного движителя.
Целью изобретения является самоадаптация движителя к изменению трения-сопротивления внешней среды в реальном масштабе времени.
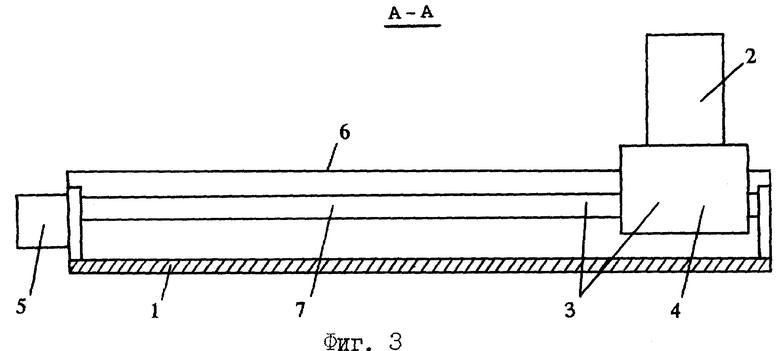
Поставленная цель достигнута тем, что в известный гравитационный движитель по фиг. 2 и 3, содержащий основание 1, на котором установлено рабочее тело 2 с возможностью его прямого и обратного перемещения в плоскости основания 1 из положения х21 (1 в положение x21 (2, дополнительно введены линейный электродвигатель 3, установленный на основании 2, на подвижной части 4 которого закреплено рабочее тело 2, и датчик 5 скорости основания 1, выход которого подключен к входу блока обработки информации и программного управления 6 линейного электродвигателя 3.
Отличительными признаками предлагаемого гравитационного движителя, в сравнении с известными, является дополнительно введенный контур самоадаптации движителя к изменению коэффициента γ1 затухания его движения, состоящий из последовательно включенных датчика 5 скорости основания 1, блока обработки и программного управления 6 линейного электродвигателя 3, первый из которых измеряет скорость основания 1, а второй вычисляет коэффициент γ1 затухания его движения и по заданному алгоритму управляет режимом работы линейного электродвигателя 3, при котором движитель наиболее эффективно совершает движение в пространстве.
Введение линейного электродвигателя 3 позволяет получить дополнительный положительный эффект - повышение нагрузочной способности движителя примерно в два раза, посредством того, что большая по массе подвижность часть 4 линейного электродвигателя 3 повышает массу закрепленного на ней рабочего тела 2, тем самым снижая массу основания 1, что, в свою очередь, позволяет увеличить полезную массу, переносимую движителем при одной и той же его полной массе.
Именно предложенная совокупность отличительных признаков в своем единстве и взаимосвязи позволяет получить суммарный положительный эффект - самоадаптацию движителя к изменению трения-сопротивления внешней среды в реальном масштабе времени при одновременном повышении его нагрузочной способности.
Исключение какого-либо из отличительных признаков нарушает всю совокупность отличительных признаков в целом, тем самым не позволяя получить какого-либо положительного эффекта.
Предлагаемый гравитационный движитель показан на фиг. 2 и 3. Он содержит основание 1, на котором установлено рабочее тело 2 с возможностью его прямого и обратного перемещения в плоскости основания 1 из положения x21 (1 в положение x21 (2, линейный электродвигатель 3, установленный на основании 2, на подвижной части 4 которого закреплено рабочее тело 2, и датчик 5 скорости основания 1, выход которого подключен к входу блока обработки информации и программного управления 6 линейного электродвигателя 3.
Датчик скорости 5 представляет собой локатор, измеряющий скорость основания 1 относительно естественных или искусственных объектов, отделяемых от основания 1.
Блок обработки и программного управления 6 содержит вычислительное устройство, которое по заданному алгоритму посредством коммутатора задает требуемый режим работы линейного электродвигателя 3.
Прямой цикл работы гравитационного движителя основан на линейном перемещении тела 1 из положения x10 (1 в положение x21 (2 основания 2 посредством линейного электродвигателя 3 по гармоническому закону, удовлетворяющему правой части уравнения прямого самодействия (37), с произвольной выбранной круговой частотой ω21.
Обратный цикл работы движителя основан на обратном линейном перемещении тела 2 из положения x21 (2 в исходное положение x21 (1 посредством линейного электродвигателя 3 по закону, удовлетворяющему
правой части уравнения обратного самодействия (69).
Во время последействия датчик 5 скорости измеряет два значения  и
и  скорости основания 1 в моменты времени t3 и tx. По этим данным блок обработки и программного управления 6 вычисляет
скорости основания 1 в моменты времени t3 и tx. По этим данным блок обработки и программного управления 6 вычисляет  и коэффициент γ1 (62) затухания движения основания 1. После чего он корректирует первоначально заданную круговую частоту ω21 так, чтобы при этом выполнилось условие 2γ1/ω21≥1 (65).
и коэффициент γ1 (62) затухания движения основания 1. После чего он корректирует первоначально заданную круговую частоту ω21 так, чтобы при этом выполнилось условие 2γ1/ω21≥1 (65).
При последующем многократном осуществлении прямого и обратного циклов с укороченным последействием результирующее дискретное смещение ΔxS движителя может быть вычислено по формуле (79). Так, например, для однократного прямого и обратного циклов с укороченным последействием при γ1 → 0 оно составляет ΔxS= ΔxCO≈ 2kR21, как показано на фиг. 1.
Если же последующие прямой и обратные циклы совершаются без укороченного последействия скорость  движителя может быть вычислена по формуле (80).
движителя может быть вычислена по формуле (80).
Непосредственное измерение скорости  основания 1 датчиком 5 позволяет непрерывно вычислять γ1 и в случае нарушения условия 2γ1/ω21≥1 (65) корректировать ω21 в реальном масштабе времени.
основания 1 датчиком 5 позволяет непрерывно вычислять γ1 и в случае нарушения условия 2γ1/ω21≥1 (65) корректировать ω21 в реальном масштабе времени.
Таким образом, датчик 5 скорости и блок обработки информации и программного управления 6 совместно с линейным электродвигателем 3 обеспечивают самоадаптацию движителя к изменению трения-сопротивления μ1= 2γ1(m1+m2) внешней среды в реальном масштабе времени.
Важный характеристикой движителя является то, что при выполнении условия 2γ1/ω21≥1 (65) его применение наиболее эффективно при малом трении-сопротивлении 0<μ1≪ ∞ внешней среды, что подтверждается зависимостью его полного смещения ΔxCO= f(γ1), показанной на фиг. 1.
Литература
1. Савелькаев С.В. Теория гравитации. - М.: МЭИ, 1993. - 108 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИТАЦИОННЫЙ ДВИЖИТЕЛЬ САВЕЛЬКАЕВА | 1993 |
|
RU2056524C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2020 |
|
RU2751169C1 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| Устройство для формирования вибрационного перемещения рабочей среды | 2021 |
|
RU2773825C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ | 2015 |
|
RU2604250C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕПЛОВЫМ СОСТОЯНИЕМ И ФУНКЦИОНАЛЬНЫМИ ПАРАМЕТРАМИ ТЕХНИЧЕСКИХ УСТРОЙСТВ | 2012 |
|
RU2511075C1 |
| Способ динамического гашения колебаний технического объекта и устройство для его реализации | 2017 |
|
RU2668887C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОЦЕНКИ В ПОЛЕТЕ СУММАРНОЙ ТЯГИ ДВИГАТЕЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2364846C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЭЛЕКТРОДИНАМИЧЕСКОЙ ТРОСОВОЙ СИСТЕМЫ ДЛЯ УДАЛЕНИЯ КОСМИЧЕСКОГО МУСОРА | 2017 |
|
RU2666610C1 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |

Гравитационный движитель Савелькаева относится к области машиностроения и может быть использован для осуществления направленного движения или строго дозированного дискретного смещения в пространстве при слабом взаимодействии с внешней средой. Он содержит рабочее тело, установленное на основании с возможностью его прямого и обратного перемещения в плоскости основания из одного положения в другое, линейный электродвигатель, установленный на основании, на подвижной части которого закреплено рабочее тело, и датчик скорости основания, выход которого подключен к входу блока обработки информации и программного управления линейного электродвигателя. Достигаемый технический эффект - возможность самоадаптации к изменению сопротивления внешней среды в реальном масштабе времени. 3 ил.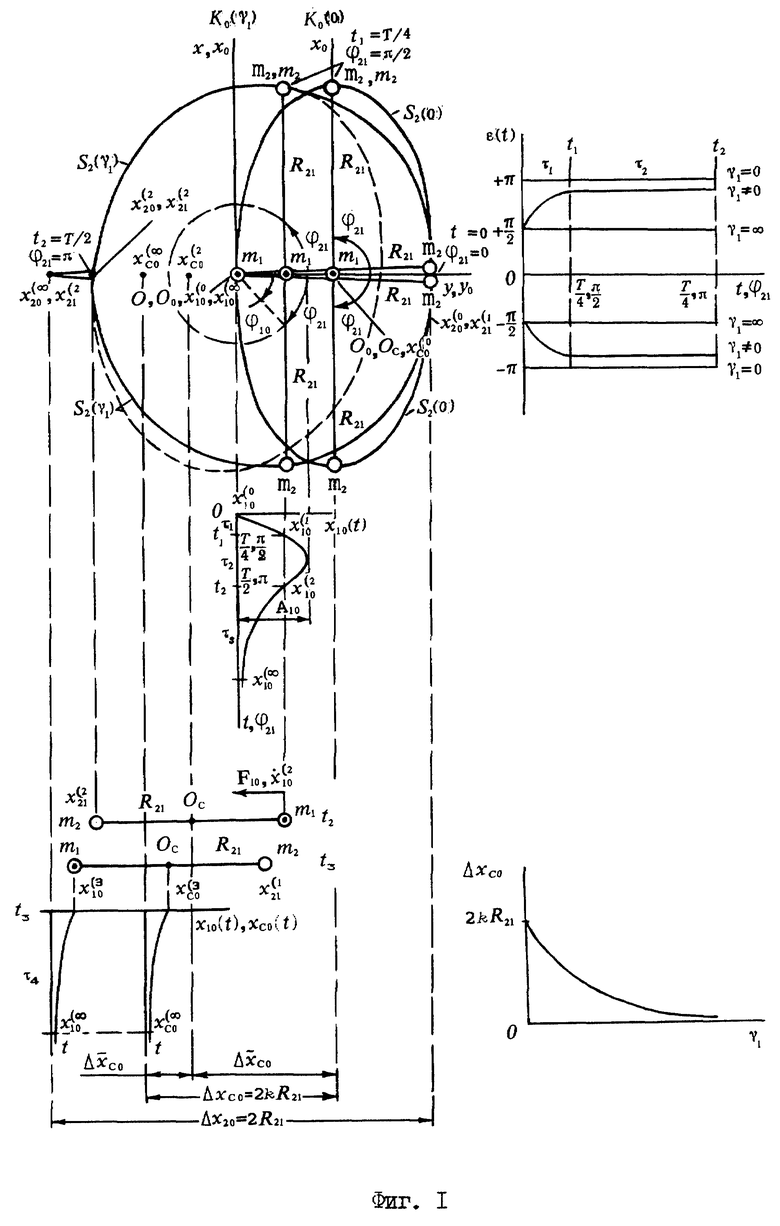
Гравитационный движитель Савелькаева, содержащий рабочее тело, установленное на основании с возможностью его прямого и обратного перемещения в плоскости основания из положения x21 (1 в положение x21 (2, где x21 (1 и x21 (2 - обобщенные координаты, отличающийся тем, что в него дополнительно введены линейный электродвигатель, установленный на основании, на подвижной части которого закреплено рабочее тело, и датчик скорости основания, выход которого подключен к входу блока обработки информации и программного управления линейного электродвигателя.
| Савелькаев С.В | |||
| Теория гравитации | |||
| - М.: МЭИ, 1983 | |||
| Гравитационное транспортное средство | 1970 |
|
SU445759A1 |
| Инерционный двигатель | 1980 |
|
SU939817A1 |
| GB 1412146 A, 29.10.75 | |||
| US 3735839 A, 29.05.73. | |||
