Предлагаемое изобретение относится к машиностроению, связанному с разработкой новых типов технологического оборудования, использующего эффекты вибрационного взаимодействия элементов машин и технологических сред.
Вибрационные технологические машины в последние десятилетия находят применение и широко используются во многих производственных процессах: в строительной индустрии, на предприятиях горнодобывающей промышленности, строительстве железных дорог, автомобильных трасс, на предприятиях химической промышленности и др.
Вибрационные технологические процессы реализуют вибрационное перемещение сыпучих смесей, их классификацию, используются для подачи и ориентации деталей в автоматизированных производствах предприятий машиностроения. Вибрационные технологии позволяют решать вопросы упрочнения поверхностей деталей сложных форм в вибрационных полях сыпучих и гранулированных сред.
Разработка научных основ вибрационных технологий нашла отражение в работах отечественных ученых Блехмана И.И., Бабичева А.П., Гончаревича И.Ф., Вайсберга Л.А., Быховского И.И., Потураева В.Н. и др. Достаточно подробно исследованы и изучены особенности формирования вибрационных полей рабочими органами вибрационных технологических машин с учетом специфических условий возбуждения колебаний, возможностей оценки, формирования и управления динамическими состояниями рабочих органов в виде протяженных твердых тел, обладающих массой и моментом инерции и совершающих плоское движение или пространственное движение под действием периодического возмущения.
Вместе с тем задачи практического освоения инновационных технологий требуют поиска и разработки новых способов и средств формирования, и управления динамическими состояниями рабочих органов и взаимодействующих с ними рабочих обрабатывающих сред.
В этом плане определенный интерес представляют возможности организации процессов взаимодействия рабочих сред с деталями в пространственных условиях, которые могут создаваться рабочими органами специальной конструкции, состоящими из нескольких взаимодействующих между собой управляемых определенным образом блоков.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известно изобретение [Серга Г.В., Резниченко С.М. «Вибрационная машина для предпосевной обработки семян», 2585476, МПК В28В 11/08, Е01С 19/42, приоритет 27.11.2005], содержащее шлифовальный барабан, внутренняя поверхность которого покрыта слоем резины, с разгрузочным окном, рабочий орган, бункер дозатор, выгрузной лоток, установленные упруго на основании, отличающаяся тем, что шлифовальный барабан, внутренняя поверхность которого покрыта слоем резины, выполнен коническим, многозаходным, винтовым и смонтирован из направляющих элементов, выполненных из трех и более скрученных по винтовой линии в продольном направлении относительно продольной оси и изогнутых по винтовой линии в поперечном направлении на оправке в виде параболоида вращения полос, выполненных с боковыми кромками выпуклой криволинейной формы с напусками, и описанные кривыми различного порядка и степени кривизны, при этом по всей длине внутри шлифовального барабана образованы напуски в виде винтовых лопастей, причем по всей длине шлифовального барабана смонтирована коническая пружина с плоским сечением витков и с устройством для изменения шага витков путем растяжения или сжатия пружины.
В рассматриваемом аналоге не предусмотрены контроль и настройка динамического состояния вибрационной технологической машины, а также отсутствует математическое описание динамических эффектов, возникающих в процессе работы.
Известен способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления [Елисеев С.В., Большаков Р.С., Елисеев А.В., Миронов А.С., Николаев А.В. «Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления», 2718177, МПК F16F 15/02, приоритет 31.03.2020], согласно которому возбуждают колебания рабочего органа вибрационной технологической машины и регистрируют смещение координат движения. Вводят в систему дополнительный вибровозбудитель и пневматический упругий элемент. Посредством изменения положения пневматического упругого элемента относительно центра масс системы элемента и давления в нем регулируют приведенную жесткость системы. Устройство содержит твердое тело на упругих опорах, вибровоздбудитель, датчики и дополнительный регулируемый упругий элемент. Дополнительный упругий элемент выполнен в виде пневмобаллона. Автоматическая система поднастройки регулирует параметры пневмобаллона. Достигается возможность настройки динамического состояния объекта за счет изменения приведенной жесткости системы.
К недостаткам можно отнести наличие сложной систему управления для получения необходимых режимов работы.
Известна вибрационная машина [Емельяненко Н.Г., Метелев А.В., Кузнецов В.В. «Вибрационная машина», 2108171, МПК В06 В 1/18, приоритет 10.03.1998], содержащая рабочий орган связан с штоками поршней, установленных в цилиндрах. Цилиндры разделены на гидрополости и пневмополости. Сообщение пневмополостей с пневмомагистралью и сброс из них сжатого газа осуществляют распределительным устройством. В отдельном блоке, сообщенном с гидрополостями, размещены упругие газонаполненные тела предпочтительно в виде тороидальных автомобильных пневмокамер. Последние сообщены между собой и пневмомагистралью. Поршни и гидрополости цилиндров разделены мембранами. За счет размещения пневмокамер в отдельном блоке улучшаются условия монтажа и эксплуатации. Сообщение пневмокамер между собой и с пневмомагистралью обеспечивает регулировку жесткости упругой системы вибромашины. Благодаря исключению перетекания жидкости из гидрополостей в пневмополости поршни в цилиндрах могут быть установлены с зазорами, вследствие чего повышается долговечного и надежность привода вибромашины.
Недостатками данного изобретения являются отсутствие возможностей регулирования динамического состояния вибрационной машины.
За прототип принимает изобретение [Мамаев Л.А., Кононов А.А., Герасимов С.Н., Бублик С.С. «Рабочий орган в виде бруса с вибрационными секторами», 2 264 912, МПК В28В 11/08, Е01С 19/42, B61F 3/10, приоритет 27.11.2005], содержащее Рабочий орган в виде бруса с вибрационными секторами, имеющий возможность совершать возвратно-поступательное волновое движение по траектории, напоминающей образующую морской волны на протяжении от середины одной впадины до середины второй, отличающийся тем, что на рабочей поверхности бруса находятся сектора, имеющие возможность совершать возвратно-поступательное движение в вертикальной плоскости, причем сектора разбиты на две группы, каждая из которых имеет возможность двигаться в противоположных направлениях, передавая вибрационное воздействие на обрабатываемую поверхность без отрыва кромки основной рабочей поверхности бруса от нее.
К недостаткам прототипа можно отнести сложность конструкции рабочего органа и отсутствие устройств для настройки необходимых режимов работы.
Задачей предлагаемого изобретения является формирование динамического состояния вибрационной технологической машины при помощи изменения параметров регулируемых конструктивных элементов.
Устройство для формирования вибрационного перемещения рабочей среды, характеризующееся тем, что содержит основной блок в виде протяженного твердого тела, обладающего массой и моментом инерции, опирающегося на упругие элементы в виде винтовых и пневматических пружин, обладающих свойством под настройки и в рамках возможностей системы управления, вибродатчиков, блока обработки информации, системы подкачки воздуха с компрессором и управляемыми дросселями, при этом устройство снабжено шарнирно соединены с опорной поверхностью, а другие - с рабочим телом, причем треугольные блоки снабжены при грузами, выполненными с возможностью изменения их массы или положения на рычагах соответствующих треугольных блоков.
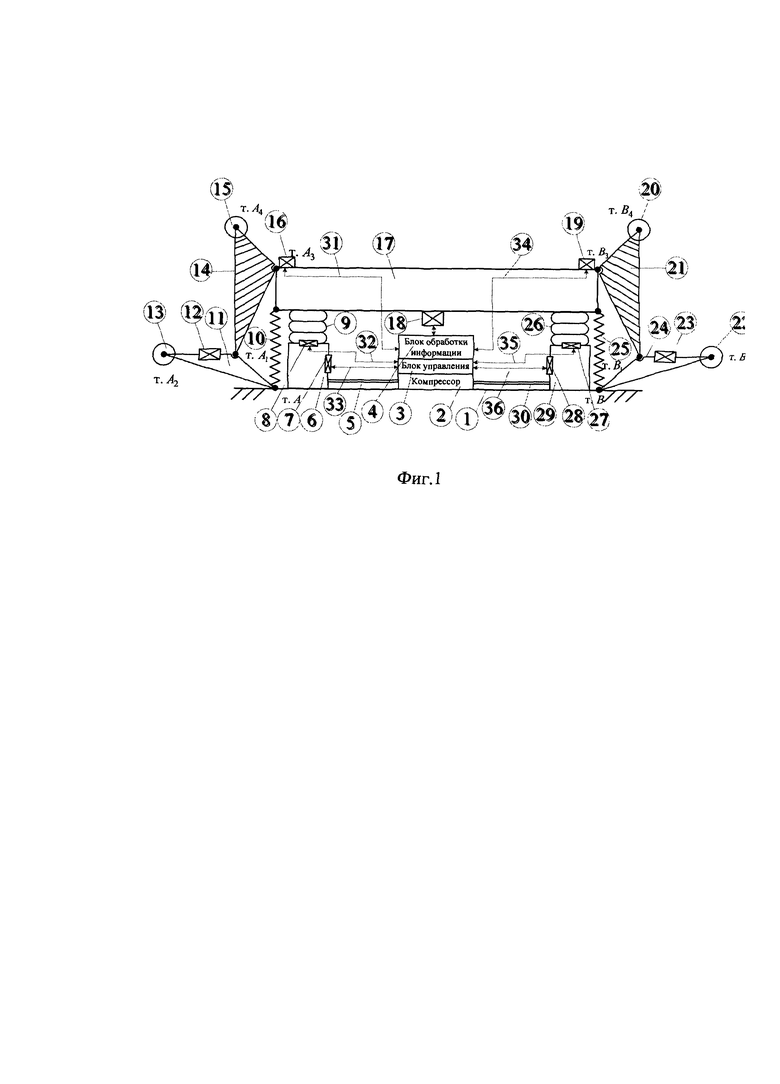
На фиг. 1 приведена принципиальная схема вибрационной технологической машины со сложным рабочим органом, содержащая опорную поверхность 1, компрессор 2, блок управления 3, блок обработки информации 4, воздуховоды 5, 30, демпфирующие камеры 6, 29, дроссели 7, 8, 27, 28, пневмоупругие камеры 9, 26, пружины 10, 25, треугольные блоки 11, 14, 21, 24, рычаги 12, 23, массо-инерционные элементы 13, 15, 20, 22, вибрационные датчики 16, 19, рабочий орган 17, вибратор 18, коммуникации 31, 32, 33, 34, 35, 36.
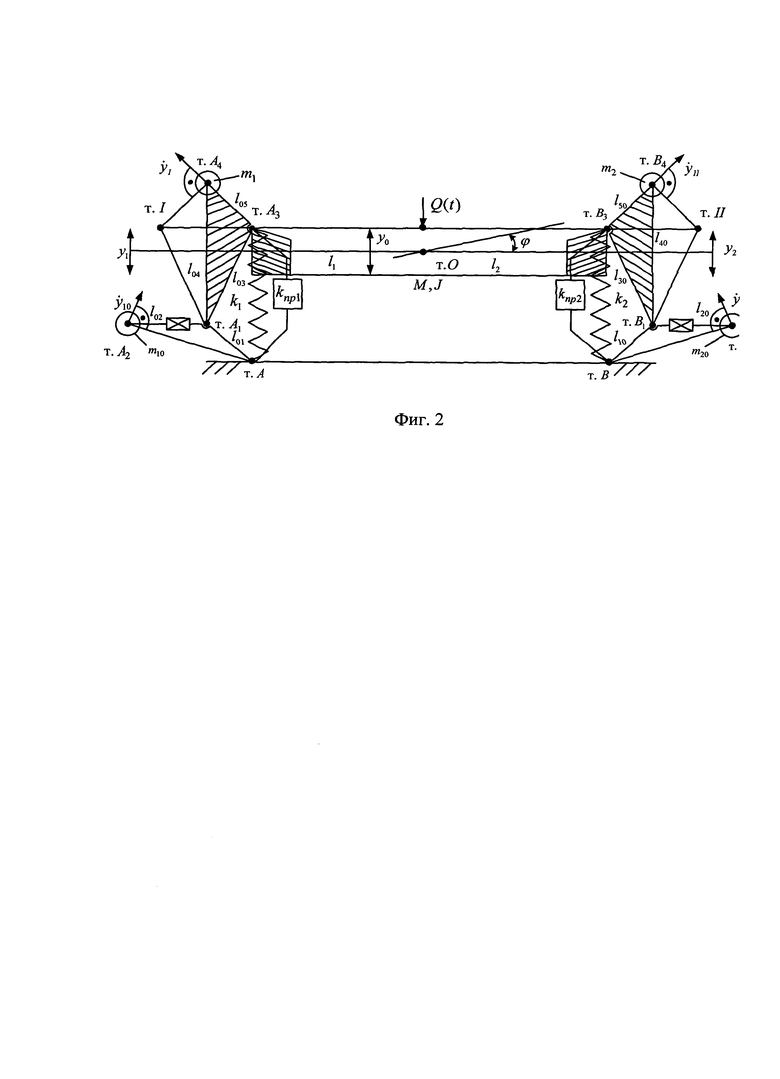
На фиг. 2 показана расчетная схема технического объекта в виде механической колебательной системы с двумя степенями свободы с составным рабочим органом.
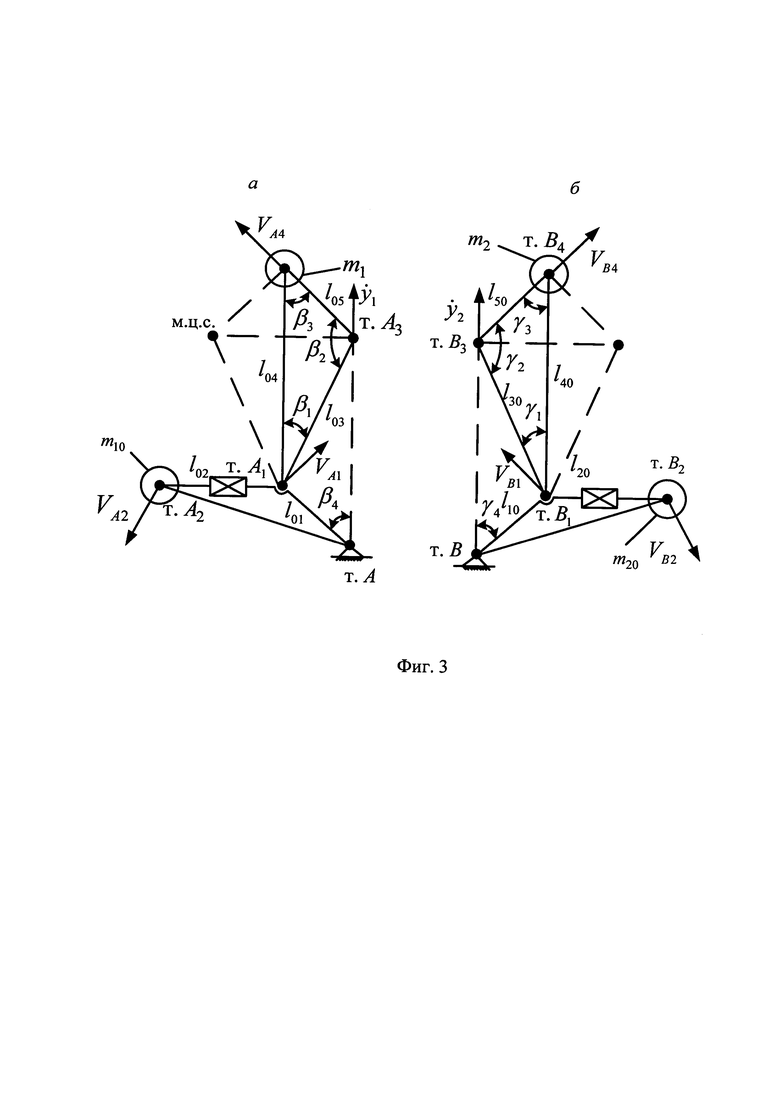
На фиг. 3, а, б представлены принципиальные схемы расположения скоростей точек по координатам у1 и у2.
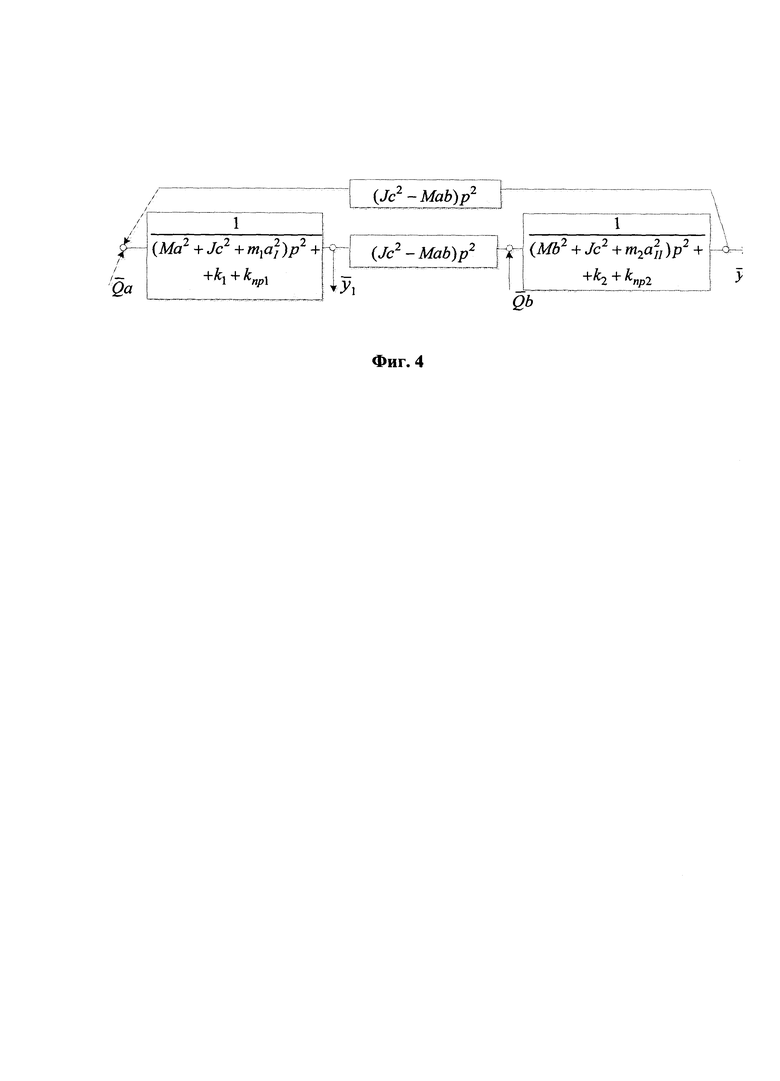
На фиг. 4 приведена структурная математическая модель (структурная схема) исходной системы по расчетной схеме на фиг. 2.
Изобретение работает следующим образом.
Предлагаемое изобретение относится к тем направлениям машиностроения, которые связаны с разработкой способов и средств повышения производительности труда, обеспечения повышения качества продукции и создания безопасных условий эксплуатации оборудования, реализующие вибрационные технологии. Изобретение реализуется механической колебательной системой, состоящей из рабочего органа в виде твердого тела, обладающего массой и моментом инерции, совершающей движения, характерные для систем с двумя степенями свободы.
Технологический объект содержит рабочий орган 17, представляющий собой соединение основного рабочего тела, к которому в тт. A3, В3 присоединяются два треугольных блока 14, 21; в этих точках блоки соединяются через шарнирные соединения с основной частью рабочего органа, положение которого определяется координатами y1 и у2; в свою очередь присоединяемые треугольные блоки 11, 24 тт. А1, В1 соединяются с рычагами 12, 23, связанными через шарнирные соединения в тт. А, В с опорной поверхностью 1.
Рабочий орган в тт. А, В опирается на упругие элементы 10, 25 с коэффициентами жесткости k1 и k2; в свою очередь упругие элементы соединяются с рабочим органом 17 в тт. А4, В4.
Параллельно упругим элементам 10, 25 с жесткостями k1 и k2 в системе устанавливаются пневмоупругие блоки, имеющие приведенные жесткости kпр1 и kпр2, которые работают параллельно с металлическими винтовыми пружинами 10, 25.
Каждый из пневмоупругих элементов связан в верхней части с рабочим органом 18; нижняя часть установлена на опорной поверхности 1.
Пневматические пружины состоят из пневмоупругих камер 9, 26 с объемами V1, V10 (пневмоупругие баллоны), опирающихся на демпфирующие камеры 6, 29 в виде жесткого баллона с объемами V2 и V20 соответственно. Внутри пневмоопор имеются дроссели 8, 27, которые могут изменять свое поперечное сечение и создавать эффекты диссипации энергии; их параметры приведенных коэффициентов вязкого трения обозначаются соответственно как b1 и b2. В разделе «Теоретическое обоснование работы системы» будут приведены более детализированные данные о работе пневмоопор.
Подкачка пневмобаллонов 9, 26 осуществляется компрессором 2 через воздуховоды 5, 30 и управляемые дроссели 7, 28. Возбуждение системы осуществляется инерционным вибратором 18, установленным в нижней части рабочего органа 17; динамическое состояние системы фиксируется вибрационными датчиками 16, 19, связанными через коммуникации 31, 34 с блоком обработки информации 4.
Настройка вибрационного технологического комплекса (фиг. 1) на соответствующее динамическое состояние обеспечивается выбором параметров возбуждения и может корректироваться путем изменения масс пригрузов m1, m2, m10, m20 13, 15, 20, 22 или путем изменения положения пригрузов на рычагах 12, 23 (вариация длин участков).
Особенностью предлагаемого изобретения является возможность создания специфических режимов в формировании вибрационных полей рабочего органа, состоящего из трех подвижных секторов, движущихся в системе двух координат плоского движения. Это позволяет при организации движения рабочей обрабатывающей среды создавать эффективные объемные движения с одновременным формированием определенных форм пространственных перемещений технологической среды, в целом, и обрабатывать детали сложной формы за счет непрерывных подбрасываний.
Настройка технологического комплекса может осуществляться путем варьирования параметрами пневмоупругих подвесок, используя управляемые дроссели и компрессор для обеспечения необходимых параметров сжатого воздуха.
Теоретическое обоснование работы системы
1. Предлагаемое изобретение как технический объект представляет собой техническую систему, принципиальная схема которой приводится на фиг. 1. Расчетная схема технического объекта по фиг. 1 представляет собой механическую колебательную систему с сосредоточенными параметрами с двумя степенями свободы. Предполагается, что расчетная схема (физическая модель системы) совершает малые колебания относительно положения статического равновесия или установившегося движения, которое рассматривается в системе координат у1, у2, связанных с неподвижным базисом.
Рабочий орган технологической машины, выполнен в виде механической замкнутой цепи, в структуре которой твердое тело массой М и моментом инерции J занимает центральное положение. Рабочий орган опирается на рычажные механизмы (рычаги, находящиеся в шарнирных соединениях, обозначенных как тт. - А1 - А4, B1-B4). В тт. A3 и В3 рабочий орган имеет контакты с упругими элементами, обладающими жесткостями k1 и k2; параллельно этим элементам используются управляемые пневмоупругие опоры с демпферными камерами.
Расчетная схема исходной системы (фиг. 1) приводится на фиг. 2 и представляет собой механическую колебательную систему с двумя степенями свободы, структура которой имеет набор дополнительных динамических связей, реализуемых рычажными механизмами.
Динамика исходной системы (фиг. 2) достаточно сложна, однако ее рассмотрение может быть упрощено построением линейной математической модели при учете малости колебаний элементов, относительно положения статического равновесия.
Элементы системы, кроме рабочего органа, имеющего массу М и момент инерции J, обладают также массоинерционными свойствами в виде сосредоточенными масс m1, m2, m10, m20 в тт. А2, В2, А4, В4.
Система имеет источники внешнего возбуждения колебаний рабочего органа в виде внешней гармонической силы Q(t), приложенной в т. О - центре масс; положение центра масс относительно концов рабочего органа (тт. А3, В3) длинами плеч l1, l2.
Движение системы рассматривается с использованием систем координат у1, у2, а также у0, ϕ. Между координатами имеются следующие соотношения

где 
Для построения математической модели используется метод Лагранжа [1], что связано с построением выражений для кинетической и потенциальной энергий системы, что требует определения скоростей движения элементов m1, m2, m10 и m20. Искомые скорости на расчетной схеме (фиг. 2) обозначены соответственно: для

Определение скоростей  ,
, ,
, ,
, производится с использованием представлений о мгновенных центрах скоростей, что требует определенных геометрических построений. Необходимые данные приводятся на схемах (фиг. 3, фиг. 4). Нужная информация о конструктивных параметрах (углы β1, β2, β3 и γ1, γ2, γ3), длины звеньев l01, l02, l03, l10, l20, l30, l40 и др. параметры являются исходными и определяются, исходя из конструктивно-технических соображений, связанных с проектными решениями.
производится с использованием представлений о мгновенных центрах скоростей, что требует определенных геометрических построений. Необходимые данные приводятся на схемах (фиг. 3, фиг. 4). Нужная информация о конструктивных параметрах (углы β1, β2, β3 и γ1, γ2, γ3), длины звеньев l01, l02, l03, l10, l20, l30, l40 и др. параметры являются исходными и определяются, исходя из конструктивно-технических соображений, связанных с проектными решениями.
Используя вспомогательные расчетные схемы (фиг. 3, фиг. 4) на основе известных конструктивно-технических данных, определяются соотношения

С учетом вышеприведенного выражение для кинетической энергий системы примет вид

2. Для определения потенциальной энергии системы необходимо принимать во внимание детализированные представления относительно пневмоупругих блоков.
Как уже отмечалось ранее, пневмоупругий блок (пневмопружина) состоит из пневмоупругого элемента баллонного типа с объемом камеры V1, что формирует локальную жесткость (эквивалентной пружины) k01. Второй блок пневмопружины образует демпферную камеру; оболочкой такой камеры является жесткая цилиндрическая оболочка объемом V2, что формирует эквивалентную локальную жесткость k02. Обе упомянутые камеры соединяются через управляемый лепестковый дроссель, создающий условия для диссипации энергии, что можно отобразить в виде демпфирующего соединительного звена с коэффициентом демпфирования b.
Общая схема пневмоупругого блока может быть представлена последовательным соединением двух составляющих элементов

Если b1 → 0, то

При b1 → ∞ - kпр1=k01.
Особенности динамических свойств таких упругих элементов будут рассмотрены далее, но в более удобной операторной форме. Таким образом выражение для потенциальной энергии системы можно представить в виде

где 
3. Используя выражения для кинетической и потенциальной энергий запишем ряд вспомогательных соотношений для системы с двумя степенями свободы:




Математическая модель исходного объекта по расчетной схеме, приведенной на фиг.2, может быть представлена системой двух обыкновенных дифференциальных уравнений с постоянными коэффициентами во временной области


Уравнения во временной области (11), (12) могут после интегральных преобразований Лапласа при нулевых начальных условиях представлены в операторной форме [1]:


где p=jω - комплексная переменная (J=√-1), значок <-> над переменной означает ее изображение по Лапласу [3].
Система уравнений (13), (14) в операторной форме может быть интерпретирована структурной схемой эквивалентной в динамическом отношении системы автоматического управления, как это показано на фиг. 4 [2].
Используя структурную схему (фиг. 4) можно построить передаточные функции системы при заданном силовом возмущении  , которые одновременно действует на два входа системы:
, которые одновременно действует на два входа системы:


где 
является частотным характеристическим уравнением системы.
4. Оценка возможных динамических свойств. Рассматриваемая механическая колебательная система состоит из двух парциальных блок, соединенных между собой звеном межпарциальных связей; это звено отражает инерционный характер динамических связей между парциальными блоками.
При определенных сочетаниях инерционных параметров системы парциальные связи могут обнуляться; в этом случае парциальные блоки могут обнуляться; в этом случае парциальные блоки работают в автономном режиме.
В целом система обладает двумя частотами собственных колебаний, при которых возможно возбуждение резонансных (b1=0, b2=0) или околорезонансных режимов (b1≠0, b2≠0).
Анализ показывает, что на определенных частотах, что совпадает с «обнулением» числителей передаточных функций W1(p) и W2(p) возможна реализация режимов динамического гашения колебаний, что позволяет создавать на рабочем органе вибрационные поля (то есть распределения колебаний точек рабочего органа) разнообразных форм движения элементов системы, обеспечивающих пространственные формы взаимодействия сыпучих технологических сред с обрабатываемом на рабочем органе изделии.
5. Большими возможностями в оценке динамического состояния вибрационной технологической машины, в плане выбора и оценки динамических режимов, обладает подход, основанный на использовании передаточной функции межпарциальных связей

Обычно W12(p) рассматривается как связности движения по координатам  и
и  . Если W12(p)=i=1, то рабочий орган совершает только поступательные вертикальные вибрационные движения. В свою очередь, при i=-1 рабочий орган совершает только угловые колебания при условии, что у0=0 (то есть центр масс является неподвижным).
. Если W12(p)=i=1, то рабочий орган совершает только поступательные вертикальные вибрационные движения. В свою очередь, при i=-1 рабочий орган совершает только угловые колебания при условии, что у0=0 (то есть центр масс является неподвижным).
Трапецеидальную форму имеют распределения амплитуд колебаний точек по длине рабочего органа, если i>1 или i<1. В этом случае рабочий орган имеет так называемый центр колебаний, относительно которого рабочий орган совершает угловые колебания.
В режимах динамического гашения колебаний ( и
и  ) узел колебаний совпадает с «обнуляющейся» координатой.
) узел колебаний совпадает с «обнуляющейся» координатой.
Наличие в системе пневмоупругого блока с управляемым дросселем (b1, b2) позволяет избегать резкого нарастания амплитуд колебаний в частотах, близких резонансным.
Выбор и настройка вибрационного технологического комплекса осуществляется варьированием значений масс пригрузов m1, m2, m10 и m20 и возможностями и длин плеч рычагов l10 и l20, что формирует значения настроечных массоинерционных коэффициентов aI, aII, а10, а20. Кроме того, в случае необходимости могут использоваться возможности дросселирования каналов упругих и демпферных камер пневмоупругих опор.
Для поддержания параметров подвески и ее регулирования система снабжается компрессором.
Динамическое состояние вибрационного технологического комплекса контролируется соответствующими датчиками, имеет систему сбора и обработки информации в соответствии с регламентами технологического процесса для получения различных динамических режимов, в том числе тех, которые могут быть применены при обработке деталей сложной формы.
Источники информации
1. Лурье А.И. Операционное исчисление и его приложения к задачам механики. М.; Л.: Гос. изд-во техн.-теор. лит., 1950. - 431 с.
2. Eliseev S.V., Eliseev A.V. Theory of oscillations. Structural mathematical modeling in problems of dynamics of technical objects. Cham: Springer Nature Switzerland AG, 2019. 521 p.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755534C1 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| Способ корректировки распределения амплитуд колебаний рабочего органа вибрационного технологического стенда и устройство для его реализации | 2018 |
|
RU2716368C1 |
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
| Устройство формирования специфических режимов динамического состояния рабочего органа вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2756393C1 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |
| Способ управления динамическим состоянием технологической вибрационной машины и устройство для его осуществления | 2018 |
|
RU2711832C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
Изобретение относится к машиностроению. Устройство для формирования вибрационного перемещения рабочей среды содержит основной блок в виде протяженного твердого тела, обладающего массой и моментом инерции, и систему подкачки воздуха с компрессором и управляемыми дросселями. Основной блок опирается на упругие элементы в виде винтовых и пневматических пружин, обладающих свойством поднастройки в рамках возможностей системы управления, вибродатчиков, блока обработки информации. Устройство снабжено шарнирно соединенными между собой треугольными блоками. Каждая пара треугольных блоков соединена с каждым из противоположных концов устройства. Одни из треугольных блоков шарнирно соединены с опорной поверхностью, другие – с рабочим телом. Треугольные блоки снабжены пригрузами, выполненными с возможностью изменения их массы или положения на рычагах соответствующих треугольных блоков. Достигается возможность предварительной настройки и поддержания заданных параметров технологического процесса. 4 ил.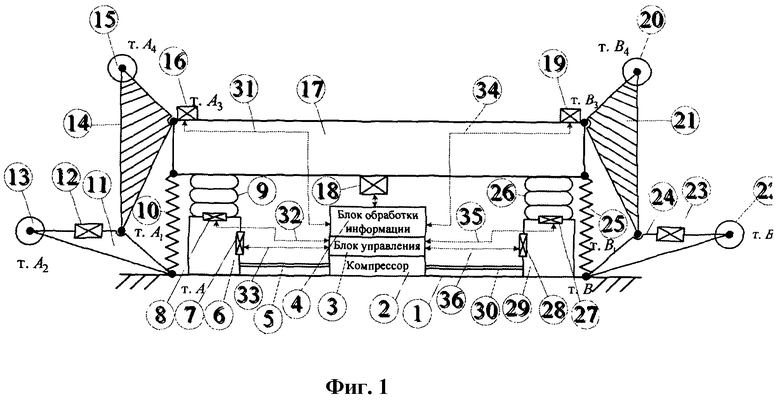
Устройство для формирования вибрационного перемещения рабочей среды, характеризующееся тем, что содержит основной блок в виде протяженного твердого тела, обладающего массой и моментом инерции, опирающегося на упругие элементы в виде винтовых и пневматических пружин, обладающих свойством поднастройки в рамках возможностей системы управления, вибродатчиков, блока обработки информации, системы подкачки воздуха с компрессором и управляемыми дросселями, при этом устройство снабжено шарнирно соединенными между собой треугольными блоками, каждая пара которых соединена с каждым из его противоположных концов, при этом одни из треугольных блоков шарнирно соединены с опорной поверхностью, другие – с рабочим телом, причем треугольные блоки снабжены пригрузами, выполненными с возможностью изменения их массы или положения на рычагах соответствующих треугольных блоков.
| РАБОЧИЙ ОРГАН В ВИДЕ БРУСА С ВИБРАЦИОННЫМИ СЕКТОРАМИ | 2004 |
|
RU2264912C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОЙ ОБРАБОТКИ | 2004 |
|
RU2275286C1 |
| Способ настройки распределения амплитуд колебаний рабочего органа вибростенда и устройство для его осуществления | 2018 |
|
RU2695899C1 |
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
| US 4001658 A1, 04.01.1977. | |||

