Предлагаемое изобретение относится к области ракетостроения и может быть использовано при проектировании систем управления полетом управляемых снарядов и ракет.
При разработке простейших комплексов управляемого вооружения приходится решать противоречивые задачи по обеспечению эффективности управления полетом управляемого снаряда при простых схемных решениях как системы управления, так и снаряда. При этом, учитывая многократность использования установки с наземной аппаратурой управления (НАУ) для запуска управляемых снарядов, требование по простоте конструкции, предъявляемые к снаряду, более жесткие, чем к установке.
Одним из вопросов, возникающих при разработке управляемых комплексов вооружения, является обеспечение нормального прохождения снарядом начального участка полета, который характеризуется рядом процессов, не позволяющих сразу после старта снаряда производить наведение его на цель. Это связано и с дымовыми помехами от работы стартового двигателя, кратковременно задымляющего линию визирования, и с переходными процессами в аппаратуре управления, и параллаксом между линией прицеливания и линией выстреливания.
В результате на вход снаряда проходят ложные команды, отрабатываемые рулевым приводом, которые уводят снаряд от линии прицеливания, и к моменту появления возможности управления снаряд находится на существенном расстоянии от нее. При этом увеличивается время переходного процесса по возвращению снаряда на линию прицеливания, ухудшается его качество, что приводит к увеличению "мертвой зоны", а в некоторых случаях - к потере снаряда.
Известны различные способы и устройства для улучшения наведения управляемых снарядов и ракет в цель при прохождении "мертвой зоны". Так, в известном способе наведения телеуправляемой ракеты [1] на начальном участке полета ракеты вплоть до отделения двигателя формируют широкое поле управления и в течение времени разгона нагревают элемент конструкции ракеты, по которому производят управление, замеряя угол между его положением в пространстве и линией визирования цели. При достижении значения указанного угла, меньшего половины телесного угла узкого поля управления, переходят на управление в узком поле (с одновременным отделением двигателя).
При указанном способе задача успешного прохождения начального участка полета решается, но, во-первых, при этом существенно усложняется конструкция ракеты, а во-вторых, применение широкого поля управления в ряде комплексов (например, в ПТУРСАХ, запускаемых с наземной установки) неприемлемо ввиду расположения линии визирования вблизи земли и возможности потери снаряда при широком поле управления.
Известны и другие способы наведения, позволяющие улучшить прохождение снарядом начального участка. Наиболее близким к заявляемому является способ наведения ракеты типа "земля-земля" и система для осуществления этого способа [2] . Суть способа заключается в формировании после совмещения линии визирования прибора наведения с точкой прицеливания при наведении трех фаз управления полетом. На 1-й фазе полета, определяемой временем Т1, ракета направляется по восходящей траектории с постоянным углом подъема к линии визирования. На 2-й фазе полета, определяемой временем T2, ракета получает команду для полета по нисходящей по отношению к линии визирования траектории до пересечения ее. На 3-й фазе полета, определяемой временем T3, ракету переводят на траекторию полета по линии визирования, направленной в цель.
Недостатком указанного способа является существенное расширение "мертвой зоны" при полете ракеты из-за наличия 1-й и 2-й фаз, уводящих, а затем приводящих ракету к линии визирования, что неприемлемо для рассматриваемого класса управляемых снарядов, т.к. противоречит условию их применения по ближней зоне, в которой может располагаться цель.
Система наведения для осуществления рассматриваемого способа включает наземный прибор наведения с оптическим прицелом и прибором обнаружения, вспомогательное устройство с датчиком времени, программатором и блоком преобразования сигналов, а также проводную линию связи и рулевой привод на борту ракеты. Осуществляя формирование команд управления по программе в зависимости от времени пуска, расстояния от цели и сигнала с гониометра, вспомогательное устройство имеет сложные блоки, что в целом усложняет аппаратуру управления.
Задачей предлагаемого изобретения является повышение точности наведения управляемого снаряда при упрощении его конструкции. Для достижения поставленной задачи в предлагаемом способе наведения управляемого снаряда, включающем совмещение линии визирования прибора наведения с точкой прицеливания, выстреливание снаряда из контейнера, раскрытие рулей по выходу снаряда с последующим управлением полетом снаряда, процесс управления разбивают на две фазы. На первой фазе управления, которая начинается с момента выхода снаряда из контейнера и длится до окончания переходных процессов в аппаратуре управления, формируют вспомогательным блоком на выходе прибора наведения сигнал, эквивалентный нулевой команде, и одновременно на выходном валу привода рулей создают дополнительный момент, противодействующий отклонению рулей от их нулевого положения, а на второй фазе управления до конца полета формируют на выходе прибора наведения сигнал управления рулями привода снаряда в соответствии с координатами отклонения снаряда от линии визирования для направления его на линию визирования.
Система наведения, реализующая указанный способ, содержит в наземной аппаратуре управления известные блоки - оптический прицел, прибор обнаружения, блок формирования команд управления и вспомогательное устройство с датчиком времени, а на борту снаряда - проводную линию связи и рулевой привод. Дополнительно вновь введены в наземной аппаратуре управления генератор прямоугольных импульсов и коммутатор. Выход коммутатора соединен со входом проводной линии связи, первый и второй его информационные входы соединены с выходами соответственно блока формирования команд управления и генератора прямоугольных импульсов, а управляющий - вход коммутатора - с выходом датчика времени.
На борту снаряда дополнительно установлен силовой двигатель, выполненный в виде механической пружины, соединенной одним концом с корпусом рулевого привода, а другим с осью рулей. Момент, развиваемый пружиной, выбран такой величины, чтобы препятствовать отклонению рулей от их нулевого положения на первой фазе управления снаряда и не оказывать существенного влияния при управлении рулевым приводом снаряда на второй фазе. При этом жесткость пружины Cпр должна удовлетворять условию:
где Mдв(t) - минимально возможный момент, развиваемый приводом на времени t при второй фазе полета,
Mш(t) - аэродинамический момент на рулях привода для того же времени t, K - коэффициент запаса.
Новое полезное свойство - улучшение качества наведения управляемого снаряда предлагаемый способ наведения реализует путем обеспечения начальной траектории полета снаряда, практически совпадающей с начальной линией визирования и не зависящей от ложных команд управления, присущих аппаратуре управления в начале ее функционирования. При этом дополнительное введение в аппаратуру системы наведения простых блоков - генератора и коммутатора несущественно усложняет систему наведения.
На фиг. 1 изображена структурная схема устройства, позволяющего осуществить предлагаемый авторами способ наведения управляемого снаряда. Устройство включает наземный прибор наведения и бортовую систему. Прибор наведения состоит из последовательно соединенных оптического прицела 1, прибора обнаружения 2 и блока формирования команд 3, выход которого соединен с 1-м информационным входом вновь введенного коммутатора 5. Ко 2-у информационному входу подключен генератор прямоугольных импульсов 4, а к управляющему входу 3 подключен датчик времени 6.
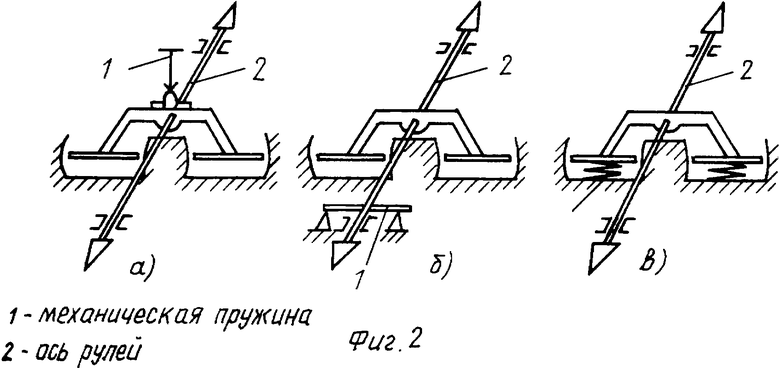
В бортовую систему входит проводная линия связи 7, релейный рулевой привод 8 с рулями 10 и вновь введенный силовой двигатель 11 в виде механической пружины, подсоединенный к оси 9 рулей 10.
На фиг. 2 представлен ряд конструктивных схем исполнения силового двигателя в виде механических пружин а) и б) - плоских, в) - цилиндрической. На фиг. 2а) пружина одним концом жестко закреплена в корпусе РП, а другим вставлена в вилку, жестко связанную с осью рулей. На фиг. 2б) пружина своей средней частью закреплена на оси рулей, а края ее опираются на винты в корпусе РП. На фиг. 2в) пружины закреплены в донной части цилиндров силового двигателя РП и взаимодействуют с поршнями, которые при повороте оси рулей сжимают поочередно пружины.
Предлагаемое устройство функционирует следующим образом.
В процессе пуска, после наведения прицела на цель, непосредственно перед стартом управляемого снаряда производят запуск генератора прямоугольных импульсов, вырабатывающего прямоугольные импульсы с нулевой командой. Сигнал генератора через вход 2 коммутатора 5 подают на вход проводной линии связи, а с нее - на вход релейного рулевого привода. По выходу снаряда из контейнера раскрывают рули, которые начинают колебаться с частотой сигнала генератора, учитывая, что в релейном приводе отсутствует позиционная обратная связь, его рули из-за собственной несимметрии привода и несимметрии аэродинамической нагрузки будут колебаться относительно среднего положения, в общем случае смещенного по отношению к их нулевому положению, создавая ложную команду управления. Силовой двигатель 11 (фиг. 1), не создающий момента на рули только при их нулевом положении, в соответствии со знаком и величиной указанного выше смещения создает момент, смещающий среднее положение колебаний рулей в сторону их нулевого положения. В результате на первой фазе полета рули не создают управляющей команды на снаряд. По истечению времени, необходимого для завершения переходных процессов в аппаратуре управления (или рассеяния дыма), т.е. при появлении возможности управления с датчика времени подается команда на управляющий вход коммутатора, по которой вход приводной линии связи переключается с выхода генератора на выход с блока формирования команд управления 3, обеспечивая управление снарядом по выведению его на линию визирования.
На управляемом участке полета снаряда при наличии на борту предлагаемого устройства его рулевой привод должен нормально функционировать, преодолевая моменты как от шарнирной нагрузки, действующей на рули, так и от силового двигателя. Движущий момент наиболее распространенных для рассматриваемого класса управляемых снарядов пневмоприводов, работающих как от набегающего потока воздуха, так и от источника рабочего тела на борту снаряда, может существенно изменяться по времени полета. Поэтому для нормальной работы привода максимальная величина момента силового двигателя должна выбираться из соотношения
Мд.с. ≤ KMдв(t)-Mш(t),
где Mдв(t) - минимально возможный момент, развиваемый приводом на времени t полета при второй фазе управления, Mш(t) - аэродинамический момент на рулях привода для того же времени t, K - коэффициент запаса, Mд.с. - максимальная величина момента силового двигателя.
Учитывая, что силовой двигатель выполнен в виде механической пружины, создающей момент на оси рулей только при отклонении их от нулевого положения, величина момента определяется произведением жесткости пружины Cпр и угла отклонения рулей δ. При этом максимальная величина указанного момента составляет Mд.с. = Cпр• δ m, где δ m - максимальный угол отклонения рулей. Следовательно, жесткость пружины, при которой обеспечивается нормальная работа привода при второй фазе управления, должна выбираться из условия
Источники информации
1. Способ наведения телеуправляемых ракет, заявка 97114122/02 от 14.08.97. МКИ 6 F 41 G 7/20.
2. Способ улучшения наведения ракет типа "земля-земля" и устройство для осуществления этого способа, заявка ФРГ N 2546592, 1977, МКИ F 41 G 7/02.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2007 |
|
RU2362106C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ С РАСКРЫВАЕМЫМИ ПОСЛЕ ПУСКА РУЛЯМИ | 2005 |
|
RU2297588C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2282128C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2241195C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260764C2 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2183808C2 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2436033C1 |
Изобретение относится к системам управления летательными аппаратами, в частности к управляемым снарядам и ракетам. Реализация изобретения позволяет повысить точность наведения управляемых снарядов и ракет и упростить систему наведения. Сущность способа наведения заключается в том, что он включает две фазы наведения. На первой фазе управления, начинающейся с момента схода снаряда и продолжающейся до окончания переходных процессов, в аппаратуре управления прибора наведения формируют на его выходе сигнал, эквивалентный нулевой команде. Одновременно создают на выходном валу рулей рулевого привода снаряда дополнительный момент, противодействующий отклонению рулей от их нулевого положения. Управление рулями привода снаряда в соответствии с координатами его отклонения от линии визирования производят на второй фазе до конца полета. Система наведения управляемого снаряда содержит вспомогательное устройство прибора наведения, где размещены генератор прямоугольных импульсов и коммутатор. Первый и второй информационные входы коммутатора соединены с выходами соответственно блока формирования команд управления и генератора прямоугольных импульсов. Управляющий вход коммутатора соединен с выходом датчика времени, а выход - со входом проводной линии связи. На борту снаряда установлен силовой двигатель, выполненный в виде механической пружины, соединенной одним концом с корпусом рулевого привода, а другим - с осью рулей. 2 с. и 1 з.п. ф-лы, 2 ил.

где Mдв(t) - минимально возможный момент, развиваемый приводом на времени t полета при второй фазе управления;
Mш(t) - аэродинамический момент на рулях привода для того же времени t;
δm - максимальный угол отклонения рулей;
К - коэффициент запаса.
| СЕТЕВОЙ ТОРГОВЫЙ АВТОМАТ ДЛЯ РАБОЧЕГО ПОМЕЩЕНИЯ ЛИБО УПРАВЛЯЕМОЙ СРЕДЫ | 2011 |
|
RU2546592C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 1997 |
|
RU2122700C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| УСТРОЙСТВО НАВЕДЕНИЯ СНАРЯДА | 1996 |
|
RU2100746C1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| КУЗОВ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2132794C1 |
| US 4641801, 10.02.1987 | |||
| DE 3403558 A1, 08.08.1985. | |||
