Изобретение относится к изготовлению блоков электро- и радиоаппаратуры, в частности к устройствам для установки радиоэлементов на печатную плату.
Известно по А. С. N 1298961, МКИ6 H 05 K 13/04, опубл. в БИ N 11 от 23.03.87, устройство для установки радиоэлементов на печатную плату, содержащее два силовых цилиндра, выполненных в одном корпусе, механизм передачи линейного перемещения штоку силового цилиндра.
Недостатком известного устройства является то, что его привод, предназначенный для обеспечения возвратно-поступательного движения зажимным губкам, выполнен с возможностью раздвинуть зажимные губки только на максимальную величину. В процессе работы при размещении на печатной плате радиоэлементов вблизи друг от друга может возникнуть ситуация, когда при разведении губок на максимальную величину они нанесут механические повреждения рядом расположенным радиоэлементам.
Известен патент N 2108232, МКИ6 B 25 J 15/02, опубл. в БИ N 10, 1998 г., схват промышленного робота содержит два последовательно расположенных силовых цилиндра с различной величиной хода, механизм передачи одностороннего линейного перемещения штоку силового цилиндра с большей величиной хода, состоящий из размещенных соосно штоку обоймы, зажимной цанги и пружины сжатия.
Привод данного схвата обеспечивает при отпускании радиоэлемента, установленного на печатной плате вблизи от других радиоэлементов, незначительный отход от него зажимных губок независимо от габаритов радиоэлементов в пределах максимального хода одного из силовых цилиндров. Недостатком же данного схвата является сложность его конструкции и большие габариты.
Задачей, решаемой данным изобретением, является упрощение конструкции привода и уменьшение его габаритов.
Технический результат, достигаемый при использовании настоящего изобретения, заключается в следующем:
- для достижения известного результата в приводе используется меньшее количество деталей;
- уменьшение габаритов снизило его материалоемкость;
- уменьшение количества деталей и их материалоемкости удешевило его себестоимость.
Указанный выше технический результат достигается за счет того, что в известном приводе промышленного робота, содержащем два последовательно расположенных силовых цилиндра с различной величиной хода, механизм передачи одностороннего линейного перемещения штоку силового цилиндра с большей величиной хода, состоящему из размещенных соосно штоку обоймы, зажимной цанги и пружины сжатия, оба силовых цилиндра выполнены в одном корпусе, их полости разделены перегородкой, при этом шток силового цилиндра с большей величиной хода пропущен через перегородку и полость другого силового цилиндра с меньшей величиной хода, обойма выполнена в поршне цилиндра с меньшей величиной хода, цанга установлена с возможностью взаимодействия с пружиной сжатия и обоймой. При этом поршень силового цилиндра с меньшей длиной хода, цанга и пружина установлены на штоке или силовой цилиндр с меньшей длиной хода дополнительно снабжен гильзой, а поршень установлен на гильзе, цанга и пружина размещены на штоке.
Выполнение обоих силовых цилиндров в одном корпусе уменьшило количество деталей, снизило материалоемкость и уменьшило габарит по длине. Пропуск штока силового цилиндра с большей величиной хода через перегородку и полость другого силового цилиндра с меньшей величиной хода позволил выполнить поршень силового цилиндра без штока, отказаться от обоймы в виде отдельной детали и выполнить ее в упомянутом поршне. Это отражено в признаке, указывающем, что обойма выполнена в поршне цилиндра с меньшей величиной хода. В результате уменьшено количество деталей, снижена материалоемкость и уменьшены габариты по длине. Габариты уменьшены также за счет того, что цанга и пружина размещены непосредственно в полости цилиндра с меньшей длиной хода.
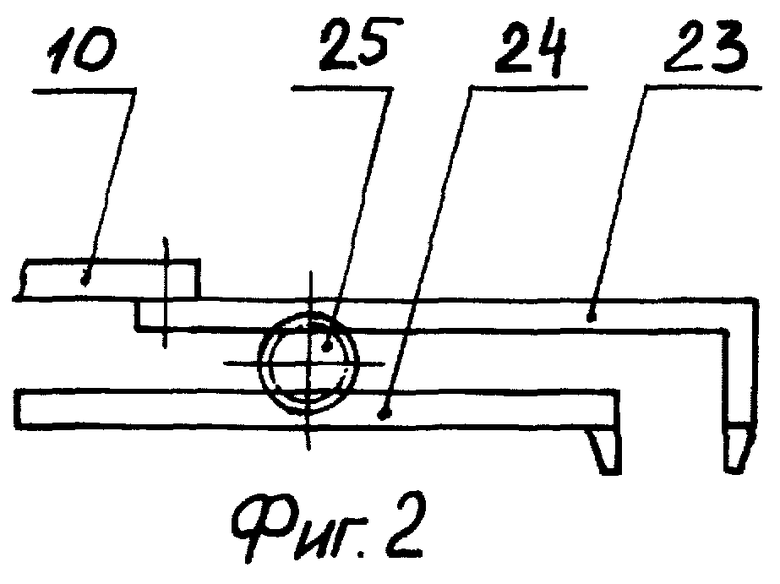
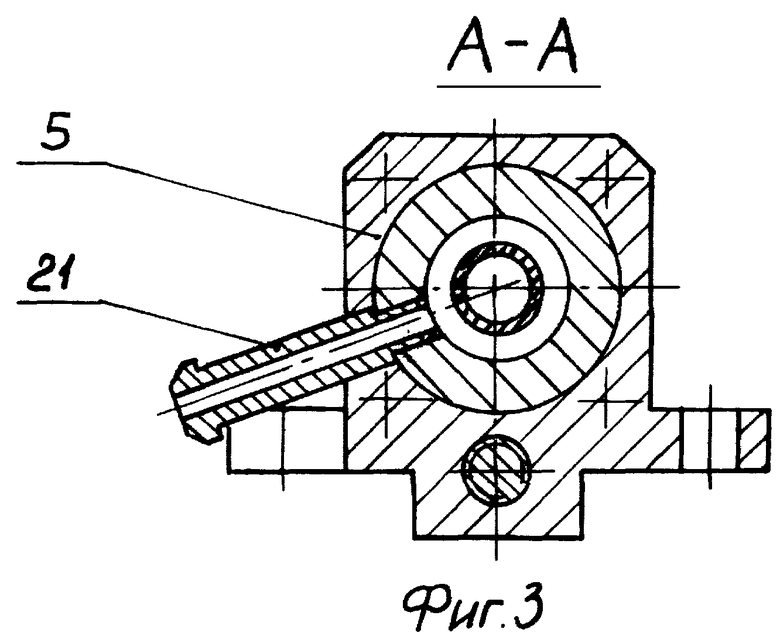
На фиг. 1 показан привод промышленного робота, общий вид: на фиг. 2 - захват (схема); на фиг. 3 - разрез А-А; на фиг. 4 - разрез Б-Б.
Привод промышленного робота (см. фиг. 1 и 4) содержит корпус 1, в котором последовательно расположены цилиндр 2 с большей величиной хода, цилиндр 3 с меньшей величиной хода. Полости обоих цилиндров разделены перегородкой 4. Корпус 1 установлен на основании 5. Полость цилиндра 2 перекрыта фланцем 6, а полость цилиндра 3 - рукой 7. Поршень 8 установлен в полости цилиндра 2, подпружинен пружиной 9, а его шток 10 пропущен через отверстие в перегородке 4 и полость цилиндра 3. В полости цилиндра 3 установлены поршень 11, цанга 12 и пружина 13.
Поршень 11 выполнен без штока, а со стороны расположения цанги 12 в нем выполнена обойма - конусное отверстие. Цанга 12 установлена с возможностью взаимодействия с пружиной 13 и с обоймой поршня 11. Поршень 11, цанга 12 и пружина 13 расположены соосно со штоком 10. При этом поршень 11 может быть размещен на гильзе 14 корпуса 1 или непосредственно на штоке 10. Цанга 12 и пружина размещены на штоке 10.
При выполнении соединений внутренняя поверхность цилиндра 2 - поршень 8 и внутренняя поверхность отверстия перегородки 4 - шток 10 с уплотнительными элементами поршень 11 можно размещать на штоке 10. При выполнении тех же соединений без уплотнительных элементов желательно поршень 11 размещать на гильзе 14. Это необходимо для того, чтобы при перемещении поршня 8 рабочая среда, например сжатый воздух, не попадала из левой полости цилиндра 2 через упомянутые соединения в левую полость цилиндра 3 и тем самым не вызвала бы преждевременное перемещение поршня 11. Выполнение поршней 8 и 11 без упомянутых уплотнений, несмотря на некоторые потери рабочей среды повышает чувствительность их перемещения от рабочей среды, или от пружин 9 и 13, ввиду отсутствия значительных потерь на трение из-за уплотнений.
Цилиндр 2 снабжен демпфирующим устройством, выполненным в виде гильзы 15 с амортизатором 16 из эластичного материала, например резины, втулки 17, шайбы 18 и пружины 19.
Фланец 6 снабжен штуцером 20 для подачи рабочей среды в полость цилиндра 2 или для ее отвода из этой же полости. Корпус 1 снабжен штуцером 21 для подачи рабочей среды в полость цилиндра 3 или для ее отвода из нее.
Привод предназначен для перемещения зажимных губок (см. фиг. 2), выполненных в виде двух реек 23 и 24, зубчатого колеса 25, кинематически связанного с зубчатыми участками этих реек. Шток 10 соединен с рейкой 23.
Привод промышленного робота работает следующим образом.
При необходимости осуществить захват радиоэлементов разных габаритов в полость цилиндра 2 с большей величиной хода через штуцер 20 подается под давлением рабочая среда и поршень 8 смещается в крайнее правое положение. При этом скорость перемещения поршня 8 гасится при его взаимодействии с амортизатором 16 демпфирующего устройства.
После того, как раздвинутые зажимные губки реек 23 и 24 подведены к радиоэлементу, осуществляется его захват.
Для захвата радиоэлемента рабочая среда, находящаяся под давлением, выпускается из полости цилиндра 2, и поршень под действием пружины 9 перемещается влево до соприкосновения зажимных губок схвата с корпусом радиоэлемента.
После установки радиоэлемента на печатную плату для отхода зажимных губок схвата от корпуса радиоэлемента в полость цилиндра 3 с меньшей величиной хода через штуцер 21 подается под давлением рабочая среда и поршень 11 смещается в крайнее правое положение. При этом обойма поршня 11 сжимает цангу 12, которая, в свою очередь, схватывает шток 10. Вследствие этого поршень 8 со штоком 10 смещается совместно с поршнем 11. Смещение поршней 8, 11 и штока 10 незначительное, но достаточное для отхода зажимных губок схвата от корпуса радиоэлемента.
После окончания работы и отхода схвата от печатной платы рабочая среда, находящаяся под давлением, выпускается из полости цилиндра 3, и поршень 11 под действием пружины 13 смещается в исходное крайнее левое положение. Вместе с ним смещается поршень 8 со штоком 10. После останова поршня 11 цанга 12 разжимается, и не удерживаемый ею шток 10 совместно с поршнем 8 под действием пружины 9 перемещается в исходное крайнее левое положение.
Положительный эффект от настоящего изобретения заключается в следующем:
- упрощена конструкция привода путем уменьшения количества применяемых деталей;
- уменьшена материалоемкость путем уменьшения габаритов привода и уменьшения количества применяемых деталей;
- уменьшена себестоимость упрощения конструкции привода и уменьшения его материалоемкости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2218269C2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ РАДИОЭЛЕМЕНТОВ ИЗ СТОПЫ | 1998 |
|
RU2141748C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
| ИМПУЛЬСНЫЙ ОТКРЫВАЮЩИЙ КОЛЬЦЕВОЙ КЛАПАН | 1998 |
|
RU2154765C2 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ЭЛЕКТРОННОЙ ТЕХНИКИ ИЗ СТОПЫ | 2001 |
|
RU2209534C2 |
| ГАЗОГИДРАВЛИЧЕСКИЙ АККУМУЛЯТОР | 1998 |
|
RU2140683C1 |
| ДАТЧИК ПРЕДЕЛЬНЫХ УСКОРЕНИЙ | 2001 |
|
RU2216026C2 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ГИДРОПРИВОДОМ | 1998 |
|
RU2141146C1 |

Изобретение может быть использовано при изготовлении блоков электро- и радиоаппаратуры в устройствах для установки радиоэлементов на печатную плату. В одном корпусе последовательно расположены силовые цилиндры с различной величиной хода. В корпусе имеется перегородка, через которую пропущен шток силового цилиндра с большей величиной хода, расположенный в полости цилиндра с меньшей величиной хода. Для передачи одностороннего линейного перемещения штоку силового цилиндра с большей величиной хода предназначен механизм в виде расположенных соосно штоку обоймы, пружины сжатия и взаимодействующей с ними зажимной цанги. Обойма расположена в поршне силового цилиндра с меньшей величиной хода. Упомянутый поршень, зажимная цанга и пружина сжатия могут быть установлены на штоке силового цилиндра с большей величиной хода. В другом варианте выполнения поршень может быть установлен на гильзе, а зажимная цанга и пружина сжатия - на штоке силового цилиндра с большей величиной хода. В результате обеспечивается упрощение конструкции устройства и уменьшение его габаритов. 2 з.п. ф-лы, 4 ил.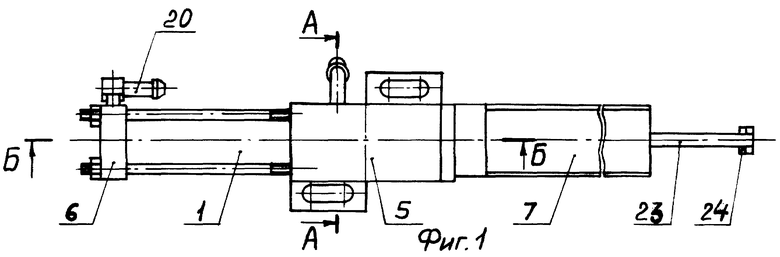
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Схват промышленного робота | 1979 |
|
SU831614A1 |
| Схват промышленного робота | 1986 |
|
SU1364473A2 |
| Схват промышленного робота | 1988 |
|
SU1583287A2 |
| Устройство для установки радиоэлементов на печатную плату | 1985 |
|
SU1298961A1 |
| US 4557660, 10.12.1985 | |||
| DE 3325921 A1, 31.01.1985 | |||
| СПОСОБ ПОЛУЧЕНИЯ БИС(1-ГИДРОКСИЭТАН-1,1-ДИФОСФОНАТО(2-))КУПРАТА(+2), ЦИНКАТА(+2) И НИКЕЛАТА(+2) ЭТИЛЕНДИАММОНИЯ | 2007 |
|
RU2352575C1 |

