со
О5 4 4:
СО
Изобретение относится к машиностроению, а именно к промышленным роботам, манипуляторам и автооператорам,предназначенным для механизации и автоматизации основных и вспомогательных операций, и является усовершенствованием известного схвата промышленного робота по авт. св. № 831614.
Целью изобретения является расширение технологических возможностей путем
тельная втулка 7 за счет винтового паза поворачивается на 90° вокруг рейки-штанги 4 и губка 11 занимает вертикальное положение. При дальнейшем движении по прямолинейному участку паза происходит зажатие изделия губками 10 и 11. Двигаясь дальше, шток силового цилиндра поворачивает корпус 1 схвата с зажатым изделием вокруг оси 12 до упора элемента 14 в корпус силового цилиндра 13, ежи- захвата и подъема изделий от одного при- 10 мая пружину 15. Этим обеспечивается отрыв- вода,изделия от стопы. Усилие пружины 15 выби- На фиг. 1 изображен предлагаемый рается так, чтобы обеспечить надежное за- схват, вид сверху; на фиг. 2 - то же, продоль- жатие изделий в губках. Угол поворота ный разрез.регулируется элементом 14.
Схват промышленного робота состоит изОсвобождение детали происходит при
корпуса 1, в котором смонтированы зубчатые обратном ходе штока силового цилилдра. колеса 2 и 3, находящиеся в зацеплении При этом корпус с зажатым изделием вна- с рейкой-штангой 4 и рейкой-втулкой 5, имею- чале принимает горизонтальное положение, щей сквозной паз 6. На рейке-штанге 4 ус- а потом происходит разжим изделия. таноБлена дополнительная втулка 7 с винто- Губка 11, поворачиваясь, занимает гори- вым пазом 8, в котором размешен палец 9, 2о зонтальное положение и при возврате руки закрепленный на рейке-втулке 5. На рейке- манипулятора проходит над установленным втулке 5 и дополнительной втулке 7 зак- в приспособление изделием, реплены губки 10 и 11. Корпус схвата с по-При установке в исходном положении
мощью оси 12, проходящей через центр зуб- губки 10 горизонтально, а губки 11 верти- чатого колеса 2, соединен с корпусом си- кально схват может брать изделия сбоку и лового цилиндра 13. Между корпусом схва- 25 работать в зоне, ограниченной по высоте. та и корпусом силового цилиндра 13 установлены регу;1ировочнь Й элемент 14 и пружина 15 сжатия. Корпус силового цилиндра 13- соединен с рейкой-втулкой 5 шарнирами 16 и 17.
Формула изобретения
1. Схват промышленного робота по авт. св. № 831614, отличающийся тем, что, с цеСхват работает следующим образом. лью расширения технологических возможВ исходном положении шток силового цилиндра 13 находится в крайнем левом положении. Изделие расположено между раскрытыми губками, причем губка 10 находится в вертикальном, а губка 11 - в
горизонтальном положении. После подачи нительной втулки.
ностей, он снабжен пальцем и дополнительной втулкой с копирным пазом, размещенной на рейке-штанге и связанной с одной из губок, палец закреплен на рейке- втулке и размещен в копирном пазу дополрабочего давления шток силового цилиндра перемещает рейку-втулку 5 вправо, а она через зубчатые колеса 2 и 3 перемещает рейку-штангу 4 влево, при этом дополни/J15 ,/4 .12
2. Схват по п. 1, отличающийся тем, что корпус схвата установлен с возможностью поворота вокруг оси одного из зубчатых колес.
губки 10 горизонтально, а губки 11 верти- кально схват может брать изделия сбоку и работать в зоне, ограниченной по высоте.
Формула изобретения
1. Схват промышленного робота по авт. св. № 831614, отличающийся тем, что, с целью расширения технологических возможлью расширения технологических возможнительной втулки.
ностей, он снабжен пальцем и дополнительной втулкой с копирным пазом, размещенной на рейке-штанге и связанной с одной из губок, палец закреплен на рейке- втулке и размещен в копирном пазу допол нительной втулки.
2. Схват по п. 1, отличающийся тем, что корпус схвата установлен с возможностью поворота вокруг оси одного из зубчатых колес.
//
Фие.1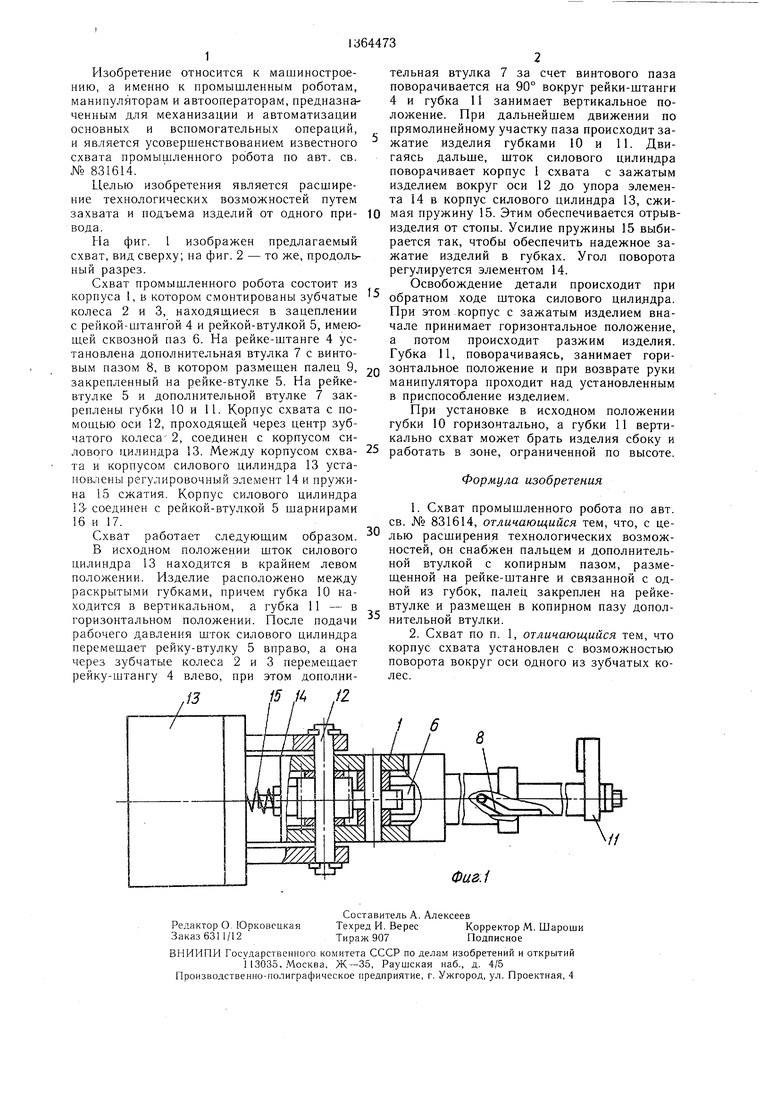
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1988 |
|
SU1583287A2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Захватное устройство | 1989 |
|
SU1646858A1 |
| Манипулятор | 1979 |
|
SU823118A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Схват манипулятора | 1983 |
|
SU1093548A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Устройство для съема с отделочных форм и укладки носочных изделий | 1989 |
|
SU1726605A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
Изобретение относится к машиностроению, а именно к промышленным роботам, манипуляторам и автооператорам, предназначенным для механизации и автоматизации основных и вспомогательных операций. Целью изобретения является расширение технологических возможностей путем захвата и подъема изделий от одного привода. Изделие расположено между раскрытыми губками, причем губка 10 находится в вертикальном, а другая губка в горизонтальном положении. Рейка-втулка 5 перемеш,а- ется и через зубчатые колеса 2 и 3 переме- ш,ает рейку-штангу 4, при этом дополнительная втулка 7 за счет копирного паза поворачивается вокруг рейки-штанги 4 и одна из губок занимает вертикальное положение. При дальнейшем перемещении рейки-втулки 5 и рейки-штанги 4 происходит зажатие изделия губками. Двигаясь дальше, поворачивается корпус 1 вместе с зажатым изделием вокруг оси до упора в корпус силового цилиндра. 1 з.п. ф-лы, 2 ил. 
| Схват промышленного робота | 1979 |
|
SU831614A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
