Изобретение относится к изготовлению блоков электро- и радиоаппаратуры, в частности к устройствам для установки изделий электронной техники (в дальнейшем изделия) на печатную плату. Оно также относится к машиностроению, в частности к конструкциям промышленных роботов для выполнения сборочных и монтажных работ.
Известен схват промышленного робота по патенту РФ 2108232, B 25 J 15/02, опубл. в БИ 10, 1998 г., содержащий два последовательно расположенных силовых цилиндра с различной величиной хода их поршней, шток одного из которых соединен с одной из двух зажимных губок.
Недостатком известного cхвата является сложная конструкция его привода, так как:
- цилиндры поршней выполнены отдельно друг от друга;
- зажимная губка соединена со штоком поршня с большей величиной хода;
- имеется механизм передачи одностороннего линейного перемещения штоку поршня с большей величиной хода, состоящий из размещенных соосно штоку обоймы, зажимной цанги и пружины сжатия.
Известный привод промышленного робота по патенту РФ 2149097, B 25 J 13/00, 15/00 // Н 05 К 13/02, содержащий силовой цилиндр и два поршня с различной величиной хода, шток одного из которых соединен с зажимной губкой схвата.
Недостатком данного привода также является сложность его конструкции, так как:
- он снабжен двумя силовыми цилиндрами, выполненными в одном корпусе;
- корпус снабжен перегородкой для разделения полостей цилиндров;
- шток поршня с большей величиной хода пропущен через упомянутую перегородку корпуса;
- в поршне с меньшей величиной хода смонтирована обойма, зажимная цанга и пружина сжатия.
Задачей, решаемой данным изобретением, является упрощение конструкции привода.
Технический результат, достигаемый при использовании настоящего изобретения, заключается в следующем:
- упрощена конструкция привода путем уменьшения количества применяемых в нем деталей;
- уменьшена материалоемкость путем уменьшения количества применяемых деталей;
- уменьшена себестоимость конструкции привода путем упрощения его конструкции.
Указанный выше технический результат достигается тем, что в известном приводе промышленного робота, содержащем силовой цилиндр и два поршня с различной величиной хода, шток одного из которых соединен с зажимной губкой схвата, оба поршня размещены в одном силовом с возможностью смещения относительно друг друга цилиндре и связаны между собой упором, при этом зажимная губка соединена со штоком поршня с малой величиной хода.
Размещение обоих поршней в одном силовом цилиндре уменьшило количество деталей. Выполнение обоих поршней с возможностью небольшого смещения относительно друг друга, задаваемого упором, которым они связаны между собой, обеспечило осуществление перемещения поршня с малой величиной хода в любой точке диапазона перемещения поршня с большей величиной хода без применения дополнительных устройств. Соединение зажимной губки схвата со штоком поршня с малой величиной хода обеспечило осуществление отхода зажимных губок от изделия на небольшое расстояние. Последний признак также позволил уменьшить количество деталей привода. Использование совокупности предложенных признаков упростило конструкцию привода.
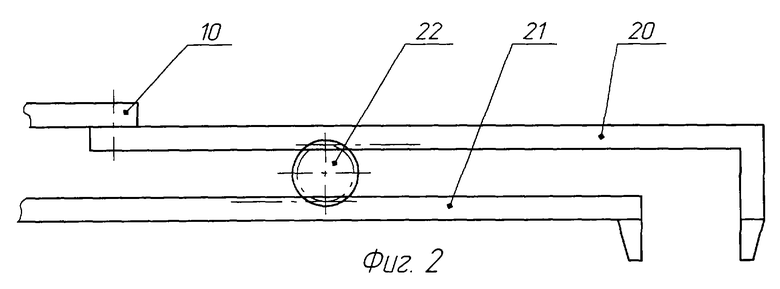
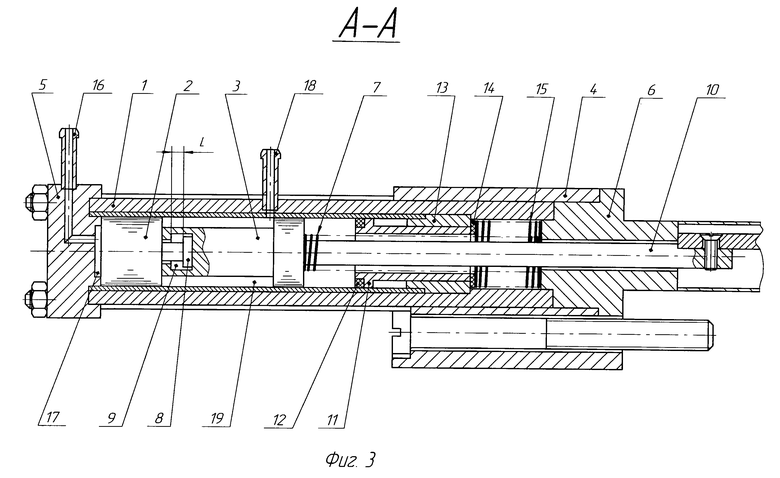
На фиг. 1 показан привод промышленного робота, общий вид; на фиг.2 - схват (схема); на фиг.3 - разрез А-А.
Привод промышленного робота (см. фиг.1 и 3) содержит цилиндр 1, в котором последовательно расположены поршень 2 с большей величиной хода и поршень 3 с меньшей величиной хода. Цилиндр 1 установлен на основании 4. Полость цилиндра 1 перекрыта фланцем 5 и рукой 6. Поршни 2 и 3 подпружинены пружиной 7. Поршень 2 с большей величиной хода выполнен без штока, а со стороны поршня 3 с ним жестко соединен упор 8. В поршне 3 выполнена кольцевая проточка 9, в которую вставлен упор 8. С противоположной стороны поршня 3 с малой величиной хода выполнен шток 10, жестко соединенный с ним.
Выполнение упора 8, жестко соединенного с поршнем 2, а кольцевой проточки 9 - в поршне 3 не является обязательным. Так, упор 8 может быть жестко соединен с поршнем 3, а кольцевая проточка 9 выполнена в поршне 2.
Фланец 5 снабжен штуцером 16 для подачи рабочей среды в полость 17 или для ее отвода из этой полости. Полость 17 расположена между поршнем 2 с большей величиной хода и фланцем 5. Цилиндр 1 снабжен штуцером 18 для подачи рабочей среды в полость 19 или ее отвода из этой полости. Полость образована между поршнем 2 с большей величиной хода и поршнем 3 с меньшей величиной хода.
Привод предназначен для перемещения зажимных губок (см. фиг.2), выполненных, например, в виде двух реек 20 и 21, зубчатого колеса 22, кинематически связанного с зубчатыми участками этих реек. При этом шток 10 привода соединен с зажимной губкой 20.
Зажимные губки 20 и 21 могут быть выполнены и в другом исполнении. Так эти зажимные губки могут быть кинематически не соединены между собой с помощью зубчатого колеса. При этом одна зажимная губка может быть выполнена неподвижной, а другая - подвижной (на чертеже не показано).
Привод промышленного робота работает следующим образом.
При необходимости осуществить захват радиоэлементов разных габаритов в полость 17 поршни 2 и 3 смещаются в крайнее правое положение, для чего в полость 17 через штуцер 16 подается под давлением рабочая среда. При этом скорость перемещения обоих поршней гасится при взаимодействии поршня 3 с амортизатором 12 демпфирующего устройства.
После того как раздвинутые зажимные губки 20 и 21 схвата подведены к изделию, осуществляется его захват.
Для захвата радиоэлемента рабочая среда, находящаяся под давлением, выпускается из полости 17, и поршни 2 и 3 под действием пружины 7 перемещаются влево до соприкосновения зажимных губок 20 и 21 схвата с корпусом радиоэлемента.
После установки радиоэлемента на печатную плату для отхода зажимных губок 20 и 21 схвата от корпуса радиоэлемента в полость 19 цилиндра 1 подается под давлением рабочая среда и поршни 2 и 3 перемещаются в противоположные стороны, проходя примерно каждый путь длиной L/2.
Смещение поршня 3 с малой величиной хода будет достаточным для отхода зажимных губок 20 и 21 схвата от корпуса радиоэлемента.
После окончания работы и отхода схвата от печатной платы с радиоэлементами рабочая среда, находящаяся под давлением, выпускается из полости 19 и поршни 2 и 3 под действием пружины смещаются в исходное крайнее левое положение.
Положительный эффект от настоящего изобретения заключается в следующем:
- упрощена конструкция привода путем уменьшения количества применяемых в нем деталей;
- уменьшена материалоемкость путем уменьшения количества применяемых деталей;
- уменьшена себестоимость конструкции привода путем упрощения его конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149097C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Устройство для установки многовыводных радиоэлементов,преимущественно микросхем,на печатные платы | 1986 |
|
SU1457186A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно микросхем | 1988 |
|
SU1688471A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Устройство для установки радиоэлементов,преимущественно микросхем,на печатную плату | 1985 |
|
SU1282369A1 |
Изобретение относится к устройствам для установки изделий электронной техники на печатную плату, к конструкциям промышленных роботов для выполнения сборочных и монтажных работ. Привод содержит силовой цилиндр и два поршня с различной величиной хода, шток одного из которых соединен с зажимной губкой охвата. Оба поршня размещены в одном силовом цилиндре с возможностью смещения относительно друг друга и связаны между собой упором. При этом зажимная губка соединена со штоком поршня с малой величиной хода. Изобретение позволит упростить конструкцию привода. 3 ил.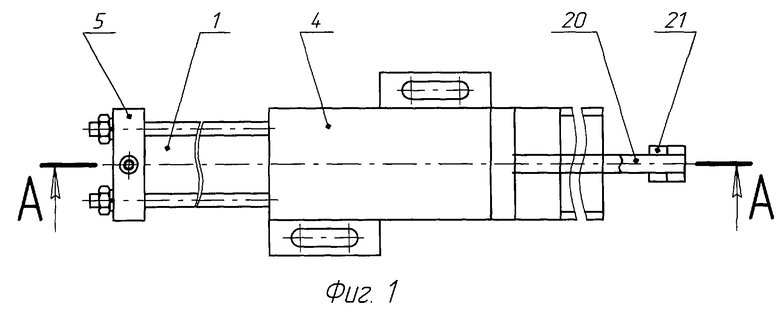
Привод промышленного робота, содержащий силовой цилиндр и два поршня с различной величиной хода, шток одного из которых соединен с зажимной губкой схвата, отличающийся тем, что оба поршня размещены в одном силовом цилиндре с возможностью смещения друг относительно друга и связаны между собой упором, при этом зажимная губка соединена со штоком поршня с малой величиной хода.
| ПРИВОД ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149097C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Транспортное средство для перевозки длинномерных грузов | 1985 |
|
SU1299861A2 |
| US 4557660, 10.12.1985. | |||

