Изобретение относится к автоматизации зажимных операций, осуществляемых в технологических процессах механообработки , загрузки-разгрузки и транспортировки деталей, предназначено для оснащения станочных манипуляторов , транспортно-перегружа- ющих механизмов, автооператоров, механических рук промышленных роботов и различных захватно-ориентирующих станочных приспособлений, предназначенных для работы в составе гибких производственных модулей и является усовершенствованием изобретения по авт.св. N 831614.
Целью изобретения является повышение надежности путем обеспечения сНазки зубчато-реечной передачи рабочей средой силового цилиндра.
На фиг. 1 изображено устройство, продольный на фиг. 2 - сечение А-Л на фиг. 1.
Схват имеет корпус 1 с торцовыми
крышками 2 и 3, боковыми сменными фланцами 4 и 5, в которых со стороны поршневой полости 1 с помощью подшипников 6 параллельно с возможностью зацепления между собой и соответствующими, шток-рейками установлены зубчатые колеса 7 и 8. Поршень 9 устройства с помощью гайки 10 закреплен н4 втулке 11, один конец которой проходит через крышку 2 и имеет посадочное место 12 стыковки со станочным приспособлением или для закрепле
ния губки 13, а другой с наружным зубчатым венцом находится в зацеплении с зубчатым колесом 7 и имеет продольный паз 14, в котором размещена часть зубчатого колеса 8, находящегося в зацеплении с рейкой штанги 15, установленной внутри втулки 11 с возможностью перемещения. Свободный конец штанги 15 также имеет посадочное место 16 для закрепления губки 17 или присоединения к приспособлениям.
Работа устройства осуществляется следующим образом.
При подаче рабочей среды в полость поршень 9 сообщает движение втулке 11, которая в свою очередь через блок зубчатых колес 7 и 8 сообщает встречное движение штанге 15. Если при этом к выходным концам втулки 11 и штанги 15 присоединить губки 13 и 17 или подвижные части зажимных приспособлений, то они совершают работу.
0
25 Формула изобретения
Схват промышленного робота по авт.св. № 831614, отличающийся тем, что, с целью повышения надежности, привод губок выполнен в виде силового цилиндра, причем зубчато-реечная передача размещена в полости корпуса силового цилиндра, а поршень этого силового цилиндра закреплен на втулке с наружным зубчатым венцом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват промышленного робота | 1986 |
|
SU1364473A2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Схват | 1987 |
|
SU1440707A2 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Стыковочное устройство робота | 1989 |
|
SU1627403A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Схват промышленного робота | 1982 |
|
SU1066801A1 |
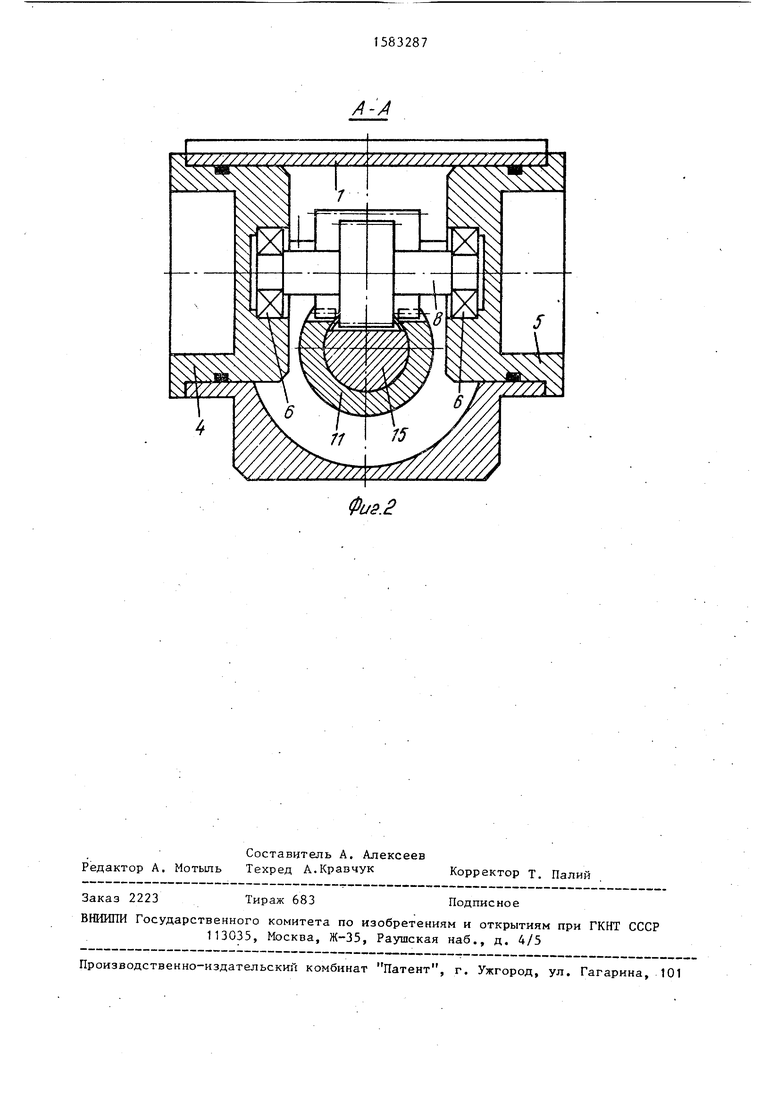
Изобретение относится к автоматизации зажимных операций. Целью изобретения является повышение надежности путем обеспечения смазки зубчато-реечной передачи рабочей средой силового цилиндра. Схват содержит корпус 1 с установленным в нем зубчато-реечным механизмом, втулка 11 которого является штоком силового привода. Рейки втулки 11 и штанги 15 установлены концентрично с возможностью относительного перемещения и кинематически связаны между собой зубчатыми колесами 7 и 8 одного и того же диаметра. На других концах реек установлены зажимные губки. 2 ил.
Фив.2
| Схват промышленного робота | 1979 |
|
SU831614A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| I | |||
