Изобретение относится к измерительной технике гироскопического приборостроения и предназначено для повышения точности работы гироскопических приборов: гировертикалей, гирополукомпасов, курсовертикалей при выполнении самолетом виража.
Известен выключатель коррекции ВК-53РБ (Выключатель коррекции ВК-53РБ. Техническое описание и инструкция по эксплуатации. М.: Оборонгиз, 1952), предназначенный для выключения систем маятниковой коррекции гироскопических приборов на вираже летательного аппарата и включающий в себя: двухстепенной гироскоп с входной осью, направленной по нормальной оси самолета, и электромеханическое устройство задержки времени, собранного на базе ламельного датчика, двигателя типа ДИД-0,5, редуктора, потенциометра обратной связи и контактного диска, включенного в цепь электромагнитного реле. При срабатывании реле его контакты размыкает цепи коррекции гироскопических приборов.
Недостатками аналога являются: 1) большой разброс времени выключения и включения коррекции гироскопических приборов за счет разброса параметров входящих блоков и зависимости их от температуры; 2) гироскопический датчик измеряет угловую скорость в проекции на нормальную ось, а не на местную вертикаль; 3) имеются скользящие контакты, которые снижают надежность работы выключателя коррекции.
Известен выключатель коррекции ВК-90М (Выключатель коррекции ВК-90М. Техническое описание и инструкция по эксплуатации. М.: Машиностроение, 1975 г), принятый за прототип, состоящий из поплавкового гироскопа с двумя степенями свободы, гашение колебаний которого осуществляется при помощи гидравлического демпфера и удерживаемый магнитной центрирующей пружиной в среднем положении и электронной цепи задержки времени с исполнительными элементами в виде электромагнитных реле.
Недостатками прототипа: 1) низкая точность задержки времени выключения или включения коррекции гироскопических приборов за счет изменения температуры; 2) гироскопический датчик измеряет угловую скорость в проекции на нормальную ось, а не на местную вертикаль, что искажает; 3) уменьшение надежности за счет износа контактов электромеханических реле; 4) сложность конструкции самого гиродатчика. Указанные недостатки снижают эффективность выключателя коррекции.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении эффективности выключателя коррекции гироскопических приборов ориентации при выполнении самолетом виража.
Технический результат достигается тем, что в выключателе цепей коррекции гироскопических приборов ориентации на вираже, содержащим два гироскопических датчика угловых скоростей, входная ось одного из которых ориентирована по нормальной оси самолета, а входная ось другого - по поперечной оси, новым является то, что он содержит две цепи преобразования сигналов, подключенные к выходам гироскопических датчиков угловых скоростей и состоящие из последовательно соединенных фильтров низких частот, масштабных усилителей и преобразователей аналог-код, подключенных на входы параллельного порта микроконтроллера, который определяет угловую скорость виража согласно формуле

где ti - дискретное время; ωy(ti), ωz(ti) - угловые скорости, измеряемые гироскопическими датчиками угловых скоростей,
а выход разовых команд микроконтроллера подключен на управляющий вход аналогового коммутатора, сигнальные входы-выходы которого включены в соответствующие цепи коррекции гироскопических приборов ориентации, и при выполнении в микроконтроллере условия

на его выходе будет логическая единица, а при выполнении в микроконтроллере условия
на его выходе будет логический ноль,
где  - постоянная составляющая угловой скорости виража, ω31 и ω32, t31 и t32 - заданные пороговые значения угловой скорости и временные задержки на отключение и включение цепей коррекции,
- постоянная составляющая угловой скорости виража, ω31 и ω32, t31 и t32 - заданные пороговые значения угловой скорости и временные задержки на отключение и включение цепей коррекции,
при логической единице на управляющем входе аналогового коммутатора его сигнальные входы-выходы разомкнуты, а при логическом ноле - замкнуты.
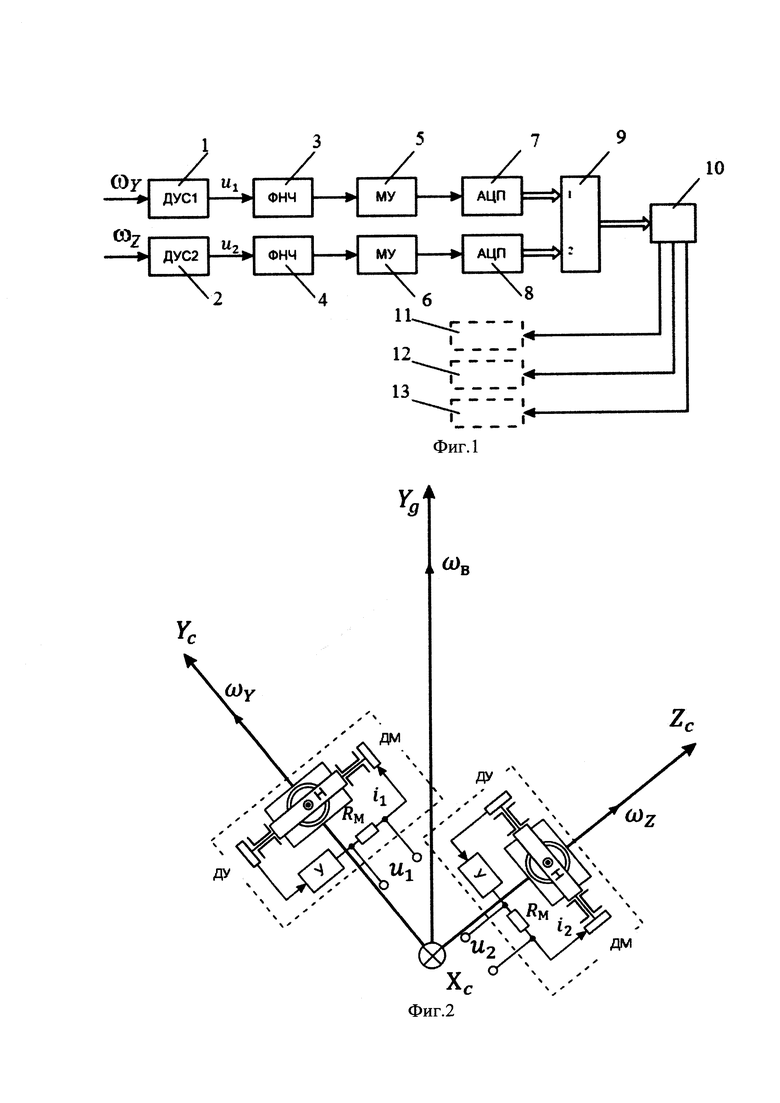
Сущность изобретения поясняется фиг. 1 - фиг. 2, где:
фиг. 1 - структурная схема устройства;
фиг. 2 - расположение ДУС на самолете.
Здесь на фигурах приняты следующие обозначения:
1-2 - датчики угловой скорости (ДУС), построенные по схеме с электрической пружиной, которая состоит из последовательно соединенных датчика угла (ДУ), усилителя (У), датчика моментов (ДМ);
3-4 - фильтр низких частот (ФНЧ);
5-6 - масштабный усилитель (МУ);
7-8 - аналогово-цифровой преобразователь (АЦП);
9 - микроконтроллер (МК);
10 - аналоговый коммутатор (АК);
11-13 - гироскопические приборы (например, гировертикали, гирополукомпас, курсовертикаль);
XcYcZc - самолетная, связанная система координат;
Хс - продольная ось (полет от нас с левым виражом);
Yc - нормальная ось;
Zc - поперечная ось;
Yg - местная вертикаль;
ωY, ωZ - угловые скорости, измеряемые датчиками угловых скоростей;
Rм - масштабный резистор, включенный в цепь электрической пружины;
i1, i2 - токи в цепях датчиков моментов ДУС 1 и 2 соответственно;
u1, u2 - напряжения, снимаемые с масштабных резисторов и которые являются выходными сигналами ДУС 1 и 2;
Н - кинетический момент роторов гиромоторов ДУС
В соответствии с фиг. 1 выходы датчиков угловых скоростей 1 и 2 подключены к фильтрам низкой частоты 3 и 4, затем выходы фильтров соединяются с масштабными усилителями 5 и 6 и только потом поступают на аналогово-цифровые преобразователи 7 и 8, выходные сигналы которых поступают на входы 1 и 2 параллельного порта микроконтроллера 9, формирующий сигнал логической единицы или логического ноля на своем выходе, сигнал с которого поступает на управляющий вход аналогового коммутатора 10, состояние сигнальных входов-выходов которого определяется наличием логической единицы или логического ноля на его управляющем входе. Сигнальные входы-выходы аналогового коммутатора 10 включены в цепи коррекции гироприборов 11-13, соответственно размыкая или замыкая их (количество гироприборов ориентации определяется конкретно для каждого типа самолетов).
Из фиг. 2 видно, что на вираже летательного аппарата, выполняемого с углом крена, и угловой скоростью виража ωв, вектор которой совпадает с осью Yg, возникают проекции ωy и ωz на нормальную Yc и поперечную Zc оси летательного аппарата. В результате у датчиков угловых скоростей, расположенных таким образом, что входная ось одного из них ориентирована по нормальной оси самолета Yc, а входная ось другого - по поперечной оси Zc, возникают гироскопические моменты, которые уравновешиваются моментами датчиков моментов ДМ, установленных на осях подвеса подвижных систем ДУСов (без учета динамических свойств ДУСов)
Hωy==Kдмi1;
HωZ=Kдмi2.
Выходные напряжения u1, u2 ДУСов формируются на масштабных резисторах Rм, включенных в цепь электрической пружины
Так как сигналы штатных ДУСов используются в автопилотах для демпфирования короткопериодических колебаний, то по своему назначению они измеряют мгновенные угловые скорости. Для построения выключателей коррекции интерес представляет постоянная составляющая. Поэтому необходимо применить аппаратные и алгоритмические средства для выделения постоянной составляющей.
Для этого выходные сигналы ДУСов поступают на фильтры низкой частоты 3 и 4, которые фильтрует низкочастотные колебания, и далее - на масштабные усилители 5 и 6, выполняющие масштабирование сигналов с ДУСов в соответствии с требованиями для входных напряжений аналогово-цифровых преобразователей 7 и 8. Выходные сигналы АЦП в цифровой форме поступают на первый и второй входы параллельного порта микроконтроллера 9, алгоритм работы которого пояснен ниже. В микроконтроллере 9 реализуется алгоритм построения угловой скорости виража, выделения ее постоянной составляющей, анализ ее величины, формирование временных задержек и, в конечном счете, на выходе микроконтроллера происходит формирование сигнала логической единицы или логического ноля, который поступает на управляющий вход аналогового коммутатора 10. Если на управляющий вход аналогового коммутатора 10 поступает сигнал логической единицы, то его сигнальные входы-выходы, включенные в цепи коррекции гироскопических приборов 11-13, размыкаются и, соответственно, отключаются коррекции этих гироприборов. Если на управляющий вход аналогового коммутатора 10 поступает сигнал логического ноля, то его сигнальные входы-выходы, включенные в цепи коррекции гироскопических приборов 11-13 замыкаются, и восстанавливаются цепи коррекции гироскопических приборов.
Алгоритм работы микроконтроллера:
1. Считывание на каждом такте (шаге) сигналов аналогово-цифровых преобразователей 7 и 8, которые соответствуют измеренным ДУС-ами угловым скоростям
ωy(ti)=(ωY (i); ωZ(ti)=ωZ (i).
2. Вычисление на каждом такте значение угловой скорости виража

3. Вычисление на заданном интервале времени Δt=hk среднего значения угловой скорости виража
где h - такт работы микроконтроллера; k - число тактов для интервала Δt
4. Если  то запускается таймер и, если при этом выполняется условие
то запускается таймер и, если при этом выполняется условие

где ω31 - заданное пороговое значение угловой скорости на отключение цепей коррекции; tB - текущее время виража; t31- заданная временная задержка на отключение цепей коррекции,
то микроконтроллер вырабатывает разовую команду в виде логической единицы, которая, поступая на управляющий вход аналогового коммутатора 10, вызывает размыкание сигнальных входов с сигнальными выходами соответствующими ключами, а так как они включены в управляющие цепи гироскопических приборов (цепи поперечной коррекции гировертикалей, цепи горизонтальной коррекции гирополукомпасов), то коррекции этих приборов будут отключены.
Если в течение времени 0<tB≤t31 нарушится выполнения условия  то таймер обнуляется, и процесс анализа запускается сначала.
то таймер обнуляется, и процесс анализа запускается сначала.
5. Если произошло срабатывание аналогового коммутатора и цепи коррекции были разомкнуты, то после завершения виража процесс восстановления цепей коррекции будет программно организован так же, как и процесс отключения коррекции.
Если  то таймер обнуляется и запускается вновь и, если при этом выполняется условие
то таймер обнуляется и запускается вновь и, если при этом выполняется условие

где ω32 - заданное пороговое значение угловой скорости на восстановление цепей коррекции; tB - текущее время, прошедшее после обнуления таймера; t32 - заданная временная задержка на восстановление цепей коррекции, то микроконтроллер вырабатывает на выходе разовых команд логический ноль, который, поступая на управляющий вход аналогового коммутатора 10, вызывает замыкание сигнальных входов с сигнальными выходами соответствующими ключами, а так как они включены в управляющие цепи гироскопических приборов (цепи поперечной коррекции гировертикалей, цепи горизонтальной коррекции гирополукомпасов), то коррекции приборов 11-13 будут восстановлены.
Если в течение времени 0<tB≤t32 нарушится выполнения условия  то таймер обнуляется, и процесс анализа запускается сначала.
то таймер обнуляется, и процесс анализа запускается сначала.
Таким образом, по сравнению с известными гироскопическими выключателями коррекции (ВК-53РБ и ВК-90М) выключатель коррекции, построенный на использовании сигналов двух штатных датчиков угловых скоростей, имеет следующие преимущества:
1. Сокращаются аппаратные затраты на создание двухстепенного гироскопа, входящего основным узлом в ВК-53РБ и ВК-90М.
2. Электромеханическая линия задержки в ВК-53РБ и линия задержки в виде электронного реле времени в ВК-90М заменены программными компонентами, реализуемыми в микроконтроллере, что позволяет более точно и надежно настраивать параметры линии задержки и сделать их независимыми от изменения температуры.
3. Программная настройка линии задержки позволяет адаптировать выключатель коррекции для применение на различных типов самолетов.
Предлагаемое устройство может быть реализовано на стандартных электронных комплектующих, основными и которых являются микроконтроллер и аналоговый коммутатор. После проведенного анализа были выбраны: микроконтроллер серии STM32F030F4P6 и аналоговый коммутатор серии 5400ТР054-00 (или его аналог 590КН-4).
| название | год | авторы | номер документа |
|---|---|---|---|
| Выключатель цепей коррекции гироскопических приборов ориентации на вираже | 2021 |
|
RU2759245C1 |
| Устройство для настройки выключателя коррекции, построенного на базе двух гироскопических датчиков угловых скоростей | 2024 |
|
RU2839681C1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЫХОДНОЙ ИНФОРМАЦИИ В БЛОКЕ ГИРОСКОПОВ И ТРЕХОСНЫЙ БЛОК ДЕМПФИРУЮЩИХ ГИРОСКОПОВ | 2015 |
|
RU2598145C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| ДАТЧИК КРЕНА И ТАНГАЖА | 2018 |
|
RU2682589C1 |
| СПОСОБ НАЧАЛЬНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2000 |
|
RU2180729C2 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
Изобретение относится к измерительной технике гироскопического приборостроения. Сущность изобретения заключается в том, что выключатель цепей коррекции гироскопических приборов ориентации на вираже содержит два гироскопических датчика угловых скоростей, подключенных на первый и второй входы параллельного порта микроконтроллера, который определяет угловую скорость виража согласно формуле

где ti - дискретное время; ωy(ti), ωz(ti) - угловые скорости, измеряемые гироскопическими датчиками угловых скоростей. Технический результат – повышение эффективности выключателя коррекции гироскопических приборов ориентации при выполнении самолетом виража. 2 ил.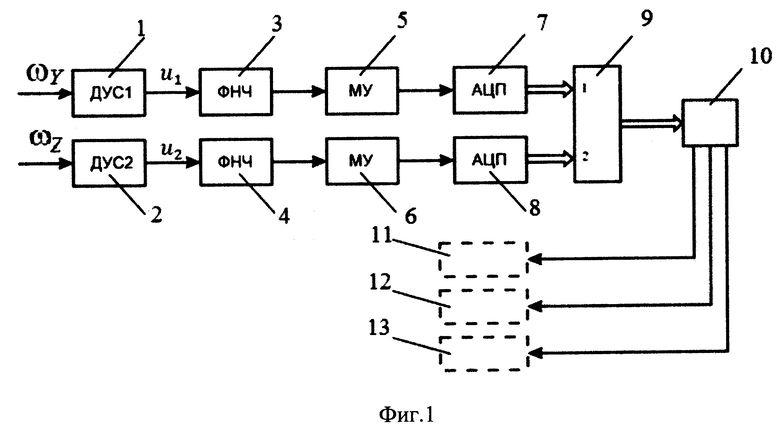
Выключатель цепей коррекции гироскопических приборов ориентации на вираже, содержащий два гироскопических датчика угловых скоростей, входная ось одного из них ориентирована по нормальной оси самолета, а входная ось второго - по поперечной оси, отличающийся тем, что он содержит две цепи преобразования сигналов, подключенные к выходам гироскопических датчиков угловых скоростей и состоящие из последовательно соединенных фильтров низких частот, масштабных усилителей и преобразователей аналог-код, подключенных на первый и второй входы параллельного порта микроконтроллера, который определяет угловую скорость виража согласно формуле

где ti - дискретное время; ωy(ti), ωz(ti) - угловые скорости, измеряемые гироскопическими датчиками угловых скоростей,
а выход разовых команд микроконтроллера подключен на управляющий вход аналогового коммутатора, сигнальные входы-выходы которого включены в соответствующие цепи коррекции гироскопических приборов ориентации, и при выполнении в микроконтроллере условия
на его выходе будет логическая единица, а при выполнении в микроконтроллере условия
на его выходе будет логический ноль,
где  - постоянная составляющая угловой скорости виража, ω31 и ω2, t31 и t32 - заданные пороговые значения угловой скорости и временные задержки на отключение и включение цепей коррекции,
- постоянная составляющая угловой скорости виража, ω31 и ω2, t31 и t32 - заданные пороговые значения угловой скорости и временные задержки на отключение и включение цепей коррекции,
при логической единице на управляющем входе аналогового коммутатора его сигнальные входы-выходы разомкнуты, а при логическом ноле - замкнуты.
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| RU 94026556 A1, 27.05.1997 | |||
| 0 |
|
SU155619A1 | |
| US 2015057959 A1, 26.02.2015. | |||

