Изобретение относится к гироскопической навигации и может быть использовано для морских, воздушных и наземных объектов.
Известна бесплатформенная инерциальная система, содержащая блок выработки навигационных параметров, центральный прибор с тремя акселерометрами, выходы каждого из которых соединены соответственно с первым, вторым и третьим входами блока выработки навигационных параметров и с тремя датчиками абсолютной угловой скорости, выходы каждого из которых соединены с четвертым, пятым и шестым входами блока выработки навигационных параметров.
Недостатком этого устройства является сложность определения, главным образом, постоянных, для данного запуска инструментальных погрешностей системы, в частности при движении объекта.
Целью изобретения является создание бесплатформенной инерциальной системы, способной оценивать постоянные, медленно меняющиеся и некоторые другие инструментальные погрешности.
Поставленная цель достигается следующим образом. Дополнительно вводится три блока поворота чувствительных элементов, в каждом из которых установлены датчики абсолютной угловой скорости или датчики абсолютной угловой скорости вместе с акселерометром, причем каждый блок поворота включает в себя управляемый двигатель, поворачивающий оси чувствительности чувствительных элементов с разными частотными параметрами относительно исходного положения для каждого блока поворота, и датчик угла поворота, выходы которых соединены соответственно с седьмым, восьмым и девятым входами блока выработки навигационных параметров, а в качестве опоры выработки замера для оценки погрешностей введен блок приема внешней информации, выход которого соединен с десятым входом блока выработки навигационных параметров, или в качестве опоры выработки замера для взаимной оценки погрешностей введены один или несколько комплектов блоков поворота чувствительных элементов, аналогичные выходы которых также соединены с блоком выработки навигационных параметров, при этом блоки поворота чувствительных элементов размещаются в центральном приборе таким образом, чтобы в исходном положении каждая ось чувствительности чувствительных элементов была ориентирована по соответствующей оси трехгранника, связанного с объектом.
На чертеже представлена функциональная схема инерциальной системы, где приняты следующие обозначения: 1 - блок выработки выходных параметров, 2 - центральный прибор, 3 - блок приема внешней информации, 4, 5 и 6 - блоки поворота чувствительных элементов, 7, 8 и 9 - датчики абсолютной угловой скорости первого, второго и третьего блоков поворота, 10, 11 и 12 - управляемые двигатели первого, второго и третьего блока поворота, 13, 14 и 15 - датчики углов поворота первого, второго и третьего блока поворота, 16, 17 и 18 - акселерометры, 19 - дополнительный центральный прибор.
Инерциальная система содержит блок 1 выработки навигационных параметров, выполняющих, в том числе, задачи фильтра, центральный прибор 2, блок приема внешней информации 3, три блока поворота чувствительных элементов 4, 5, 6, ориентированных в центральном приборе так, чтобы в исходном положении каждая ось чувствительности чувствительных элементов была ориентирована по соответствующей оси трехгранника, связанного с объектом. В качестве чувствительных элементов внутри блока поворота может располагаться либо датчики абсолютной угловой скорости, либо датчики абсолютной угловой скорости вместе с соответствующими акселерометром так, чтобы оси чувствительности их совпали.
На чертеже изображен вариант, когда в блоках поворота установлены датчики абсолютной угловой скорости 7, 8 и 9, три акселерометра 16, 17 и 18 закреплены жестко в центральном приборе. Каждый блок поворота имеет соответствующий управляемый двигатель 10 (11, 12) для поворота чувствительных элементов и датчик угла 13 (14, 15).
В качестве опоры для оценки погрешности предлагается либо использование внешней информации от блока 3, либо дополнительный ввод одного или более комплектов блоков поворота чувствительных элементов, у которых чувствительные элементы поворачиваются с разными частотными характеристиками. На чертеже изображен дополнительный центральный прибор 19.
Инерциальная система функционирует следующим образом.
Дополнительно введенные блоки поворота чувствительных элементов обеспечивают модуляцию инструментальных погрешностей системы и их оценку поскольку модуляция в каждом блоке поворота может обеспечиваться управляемыми двигателями 10, 11 и 12 с разными частотными параметрами.
Естественно, что все вырабатываемые системой параметры будут включать в себя все модулированные сигналы. Сравнивая их с аналогичными параметрами, используя внешнюю информацию, полученную с помощью блока приема внешней информации 3, можно в фильтре выделить и оценить инструментальные погрешности системы.
В случае дополнительного ввода одного или нескольких комплектов блоков поворота с чувствительными элементами, когда все чувствительные элементы колеблются на разных частотах, взаимную оценку инструментальных погрешностей всех чувствительных элементов можно осуществить, например, с помощью замеров.
 ,
,
где Л
a
Выработка навигационных параметров осуществляется в блоке 1 как обычно по сигналам 3-х акселерометров и 3-х датчиков угловых скоростей [1].
В соответствии с чертежом алгоритм определения проекций абсолютной угловой скорости приборного трехгранника, связанного с объектом на его оси, будет ,
,
где Лx1, Лy2, Лz3 - показания трех датчиков абсолютной угловой скорости первого комплекта.
Алгоритм определения проекций ускорения вершины трехгранника, связанного с объектом на его оси, будет ,
,
где аx1, аy2, аz3 - показания трех акселерометров первого комплекта блоков поворота чувствительных элементов.
Параметры модуляции, например, для блоков первого комплекта
ψI= ψ
для второго комплекта -амплитуды колебаний;
-амплитуды колебаний;
ωi - частоты колебаний i = 1, 2, 3, 4, 5, 6.
Использование: навигация морских, воздушных и наземных объектов. Сущность изобретения: бесплатформенная инерциальная система содержит блок выработки навигационных параметров, центральный прибор с тремя акселерометрами, три датчика абсолютной угловой скорости, три блока поворота чувствительных элементов, в каждом из которых установлен измеритель абсолютной угловой скорости или измеритель абсолютной угловой скорости вместе с акселерометром. Каждый блок поворота включает управляемый двигатель, поворачивающий оси чувствительности чувствительных элементов с разными частотными параметрами относительно исходного положения для каждого блока поворота, и датчик угла поворота. 1 ил.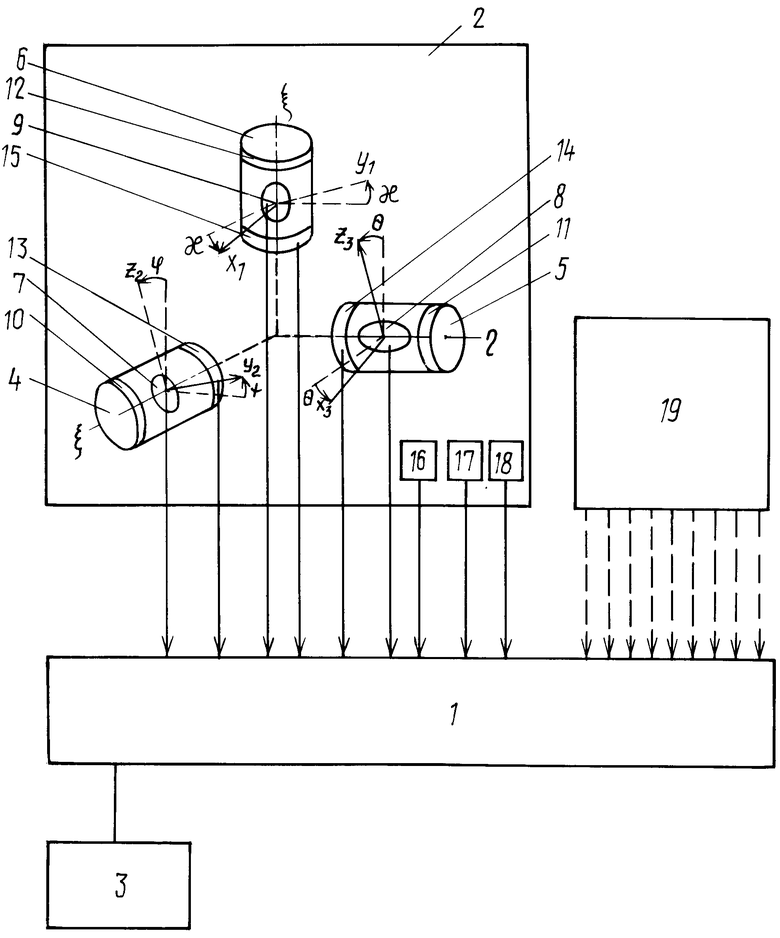
Бесплатформенная инерциальная система, содержащая блок выработки навигационных параметров, центральный прибор с тремя акселерометрами, выходы каждого из которых соединены соответственно с первым, вторым и третьим входами блока выработки навигационных параметров и с тремя датчиками абсолютной угловой скорости, выходы каждого из которых соединены с четвертым, пятым и шестым входами блока выработки навигационных параметров, отличающаяся тем, что дополнительно вводятся три блока поворота чувствительных элементов, в каждом из которых установлены датчики абсолютной угловой скорости или датчик абсолютной угловой скорости вместе с акселерометром, причем каждый блок поворота включает в себя управляемый двигатель, выполненный с возможностью поворота оси чувствительности чувствительных элементов с разными частотными параметрами относительно исходного положения для каждого блока поворота, и датчик угла поворота, выходы которых соединены соответственно с седьмым, восьмым и девятым входами блока выработки навигационных параметров, а в качестве опоры выработки замера для оценки погрешностей введен блок приема внешней информации, выход которого соединен с десятым входом блока выработки навигационных параметров или введены один или несколько комплектов блоков поворота чувствительных элементов, аналогичные выходы которых также соединены с блоком выработки навигационных параметров.
| Бромберг П.В | |||
| Теория инерциальных систем навигации | |||
| - М.: Наука, 1979, с | |||
| Способ укрепления под покрышкой пневматической шины предохранительного слоя или манжеты | 1917 |
|
SU185A1 |
