Изобретение относится к области авиации, именно к средствам, обеспечивающим повышение уровня летного мастерства по управлению летательным аппаратом (ЛА) в ручном режиме пилотирования в сложных полетных ситуациях. Изобретение может быть использовано в части обучения пилотов спортивных автомобилей, мотоциклов и иных технических средств.
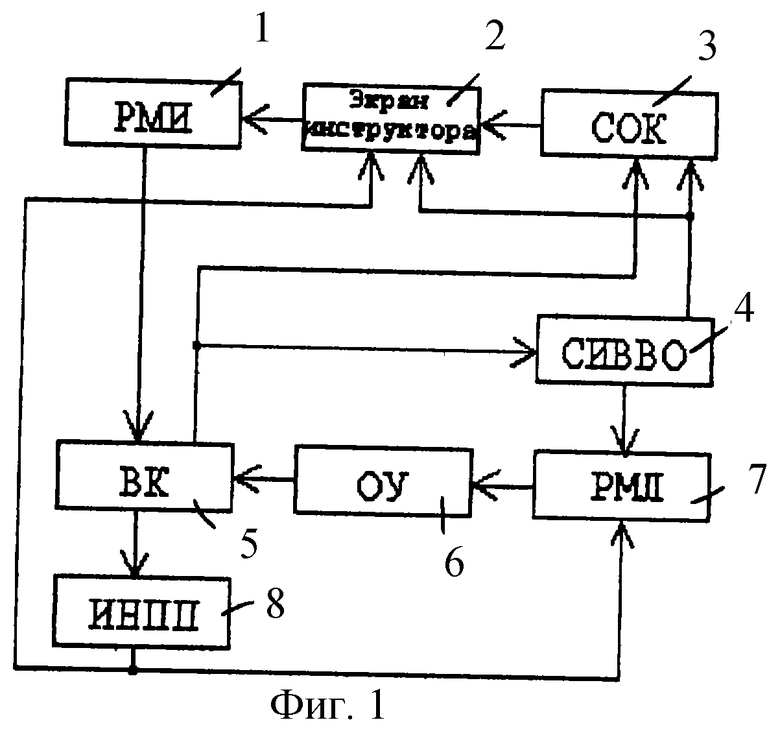
Известны способы обучения летчика управлению ЛА в режиме реального времени с использованием авиационного тренажера, заключающиеся в том, что выполняют задачу по управлению ЛА и осуществляют контроль параметров полета по заданной траектории и производят коррекцию траектории полета. Устройство для реализации известного способа приведено на фиг.1 и содержит рабочее место 1 инструктора с экраном 2, систему 3 объективного контроля параметров, систему 4 имитации внешней визуальной обстановки, вычислительный комплекс 5 параметров полета, органы 6 управления ЛА, рабочее место летчика (имитатор кабины самолета с оборудованием), имитатор 8 навигационных и пилотажных приборов (см. , например, Меерович Г.Ш. и др. Авиационные тренажеры и безопасность полетов. М., Воздушный транспорт, 1991, с.320).
В известном способе инструктор имеет возможность корректировать траекторию полета по отклонениям фактической траектории от заданной, однако в известном способе отсутствует режим коррекции управляющих воздействий летчика на органы управления ЛА в реальном режиме времени, что не позволяет упреждать выход ЛА за пределы допустимых отклонений фактической траектории полета от заданной. Это, в свою очередь, не позволяет летчику закрепить навыки управления ЛА, особенно в ручном режиме пилотирования, относительно центра масс в пределах заданных допусков по курсу, крену, тангажу. Иными словами, инструктор не может корректировать управляющие воздействия рук и ног летчика на органы управления ЛА с целью упреждения недопустимых отклонений фактических параметров полета по шести параметрам возможных перемещений ЛА в пространстве, что, в свою очередь, не способствует снижению процента катастроф из-за ошибок летного состава.
Техническим результатом заявленного способа является обеспечение надежности и быстроты отработки командных воздействий на параметры, моделирующие полет самолета, поскольку инструктор визуально наблюдает любое отклонение положения самолета, параметры которого соответствуют текущим параметрам полета, от положения самолета, параметры полета которого соответствуют заданным.
Техническим результатом заявленного способа также является повышение качества обучения летного состава за счет обеспечения возможности закрепления навыков в управлении ЛА путем упреждения инструктором выхода параметров за допустимые значения и непосредственной коррекции управляющих воздействий летчика на органы управления ЛА в режиме реального времени.
Технический результат достигается тем, что в способе обучения летчика управлению летательным аппаратом (ЛА) в режиме реального времени при управлении ЛА осуществляют контроль параметров полета по заданной траектории и производят коррекцию траектории полета, указанный контроль осуществляют с учетом допустимых отклонений параметров при слежении за скоростью рассогласования контролируемых параметров, при изменении указанной скорости указанную коррекцию осуществляют путем коррекции управляющих воздействий на органы управления ЛА. При этом могут имитировать на экране полет первого ЛА по заданной траектории в соответствии с заданными параметрами полета и полет второго ЛА в режиме реального времени в соответствии с фактическими параметрами полета с учетом допустимых отклонений по контролируемым параметрам, а изменение скорости рассогласования определяют по изменению положения на экране второго ЛА по отношению к первому и упреждают управляющие воздействия летчика на органы управления путем указанной коррекции.
В заявленном способе на фактической траектории полета до выхода ЛА в точку принятия решения осуществляют смещение местоположения ЛА в области допустимых отклонений контролируемых параметров, сохраняя при этом показания приборов летчика.
Изобретение иллюстрируется чертежами.
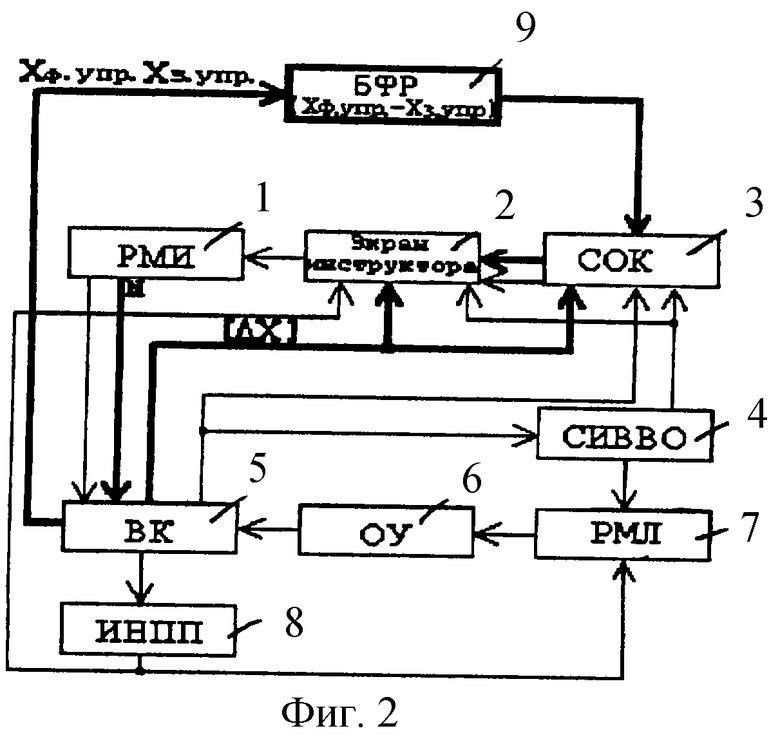
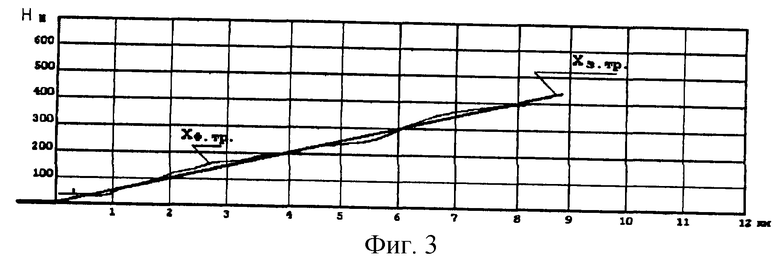
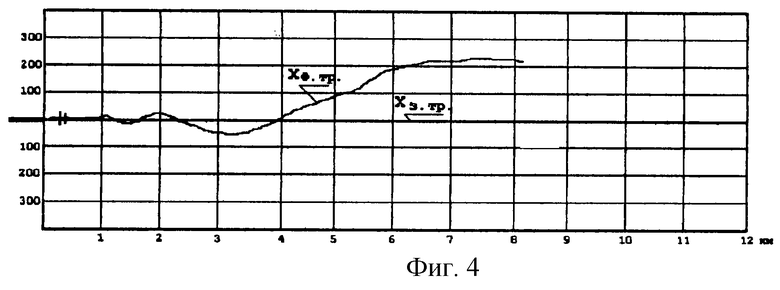
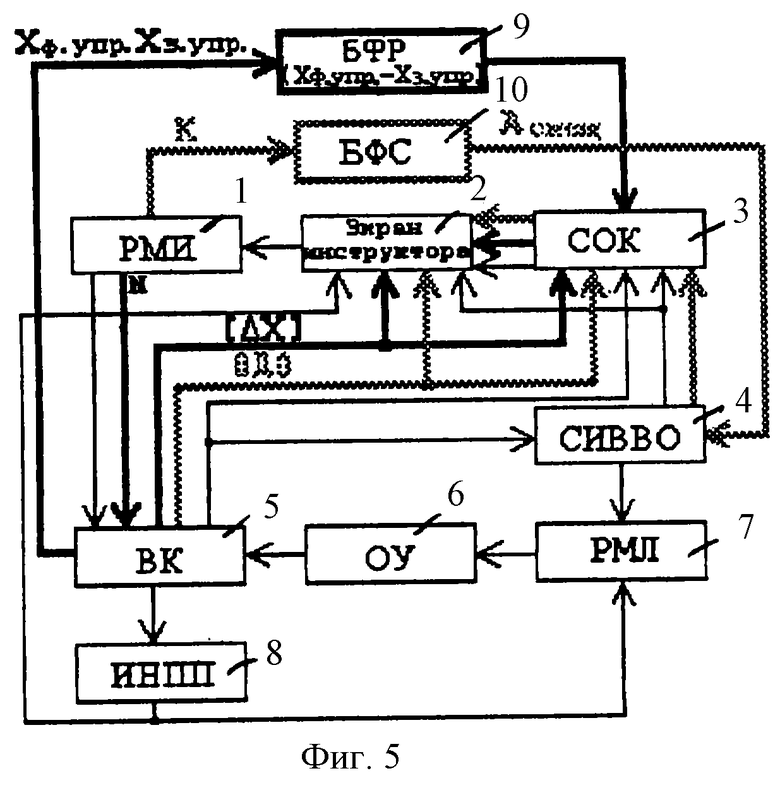
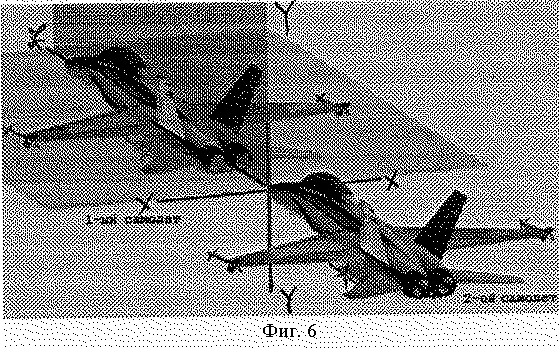
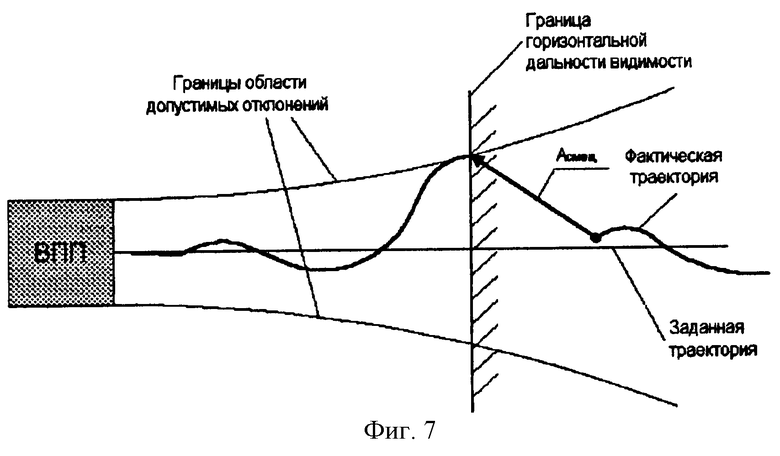
На фиг. 2 представлена функциональная схема устройства для реализации заявленного способа при коррекции управляющих воздействий на органы управления ЛА со стороны инструктора, на фиг.3 приведена диаграмма заданной траектории полета и фактической траектории в горизонтальной плоскости, на фиг.4 приведена диаграмма заданной траектории полета и фактической траектории в вертикальной плоскости. На фиг.5 представлена функциональная схема для реализации способа при смещении местоположения ЛА в области допустимых отклонений контролируемых параметров, сохраняя при этом показания приборов летчика. На фиг.6 приведена часть экрана 2 инструктора, на котором представлены изображения самолетов - первого, летящего по заданной траектории, и второго, летящего по фактической траектории с учетом рассогласования параметров управления Хф.упр.-Хз.упр. (параметры контролируются по крену, курсу, тангажу, оставшейся дальности, боковому отклонению и по высоте). При этом изображение первого и второго самолетов совмещены, например, таким образом, что они расположены при нулевых отклонениях заданной и фактической траекторий по одной горизонтальной оси Х и в одинаковых плоскостях XY, YZ. На фиг.7 приведена диаграмма заданной и фактической траекторий полета при смещении местоположения ЛА.
Устройство включает рабочее место 1 инструктора, связанное с экраном 2, информационные выходы элементов управления панели рабочего места инструктора подключены к первой группе входов вычислительного комплекса 5 параметров полета, вторая группа входов которого подключена к информационным выходам органов 6 управления, к управляющим входам которого подключены управляющие выходы панели рабочего места 7 летчика, к первой и второй группам входов которой подключены соответственно первая группа выходов системы 4 имитации внешней визуальной обстановки и выходы группы имитатора 8 навигационных и пилотажных приборов, связанные также со вторыми информационными входами блока отображения с экраном 2 инструктора, входы группы указанного имитатора 8 соединены с первым выходом вычислительного комплекса 5 параметров полета, вторые выходы которого подключены к группе первых входов системы имитации 4 и входам второй группы системы 3 объективного контроля, выход которой подключен к первым информационным входам блока отображения с экраном 2 инструктора, вторые выходы системы 4 имитации внешней визуальной обстановки соединены с входом первой группы системы 3 объективного контроля и пятой группы входов блока отображения с экраном 2 инструктора. При этом устройство содержит блок 9 формирования рассогласования параметров, вход которого подключен к третьему выходу вычислительного комплекса параметров полета 5, а выход соединен с третьим входом системы 3 объективного контроля. Рабочее место 1 инструктора имеет второй выход, связанный с третьим входом указанного вычислительного комплекса 5, четвертый выход которого соединен с четвертыми входами системы 3 объективного контроля и блока отображения с экраном 2 инструктора. При смещении местоположения ЛА устройство снабжено дополнительными функциональными связями с пятого выхода вычислительного комплекса 5 на четвертые входы блока отображения с экраном 2 инструктора и системы 3 объективного контроля, а также третьего выхода рабочего места инструктора 1 с блоком 10 формирования сигнала смещения, выход которого подключен ко второму входу системы 4 имитации внешней визуальной обстановки.
Устройство, которое реализует способ, представляет собой устройство, моделирующее процессы управления самолетом (или иным транспортным средством). Рабочее место 1 инструктора (РМИ) представляет собой панель управления на базе микропроцессора для обеспечения заданий условий и режимов полета. Соответствующие элементы управления панели управления РМИ 1 связаны также с блоком отображения (на чертеже не показан), на экране 2 которого, расположенном также на панели РМИ 1, отображается внешний вид самолета, положение которого на экране инструктора соответствуют параметрам модели полета самолета, которым управляет обучаемый. Система 4 имитации внешней визуальной обстановки представляет собой стандартное средство, например набор функциональных преобразователей и микропроцессор, в которых в соответствии с входными сигналами, поступающими из вычислительного комплекса 5, вычисляются параметры, обеспечивающие имитацию внешней визуальной обстановки, которые поступают на первые входы блока отображения с экраном 2, системы 3 объективного контроля и на рабочее место 7 летчика (обучаемого), представляющее также панель управления с элементами управления и элементами индикации (на чертеже не показаны), панель управления выполнена аналогично панели управления самолетом. В системе 3 объективного контроля на основе параметров полета, поступающих с выхода 2 вычислительного комплекса 5 и параметров с соответствующего выхода 2 системы 4 имитации внешней визуальной обстановки осуществляют сравнение параметров с заданными. Сигналы, соответствующие результатам этого контроля, поступают на первый вход блока отображения и отображаются на экране 2 инструктора, например, траектории полета (заданная и фактическая) в горизонтальной и вертикальной плоскостях. Инструктор с РМИ 1 по визуальным данным, представленным на экране 2, осуществляет коррекцию полета. При этом положение того или иного элемента управления на панели РМИ 1 преобразуется в величину соответствующих параметров и режимов полета и поступает на соответствующий вход вычислительного комплекса 5. Вычислительный комплекс 5 как заявленного, так и известного устройства прототипа является стандартным средством вычисления параметров полета, в котором по входным данным величин параметров полета, поступающих из РМИ 1 и от органов 6 управления полетом, управляемых с рабочего места 7 летчика, вычисляют величины параметров полета, поступающих соответственно на первый вход системы 4 имитации внешней визуальной обстановки (преобразующей вводимые параметры от вычислительного комплекса 5 в величины, предназначенные для имитации внешней визуальной обстановки, которые предназначены для контроля параметров полета и для отображения на рабочем месте 7 летчика и на экране 2 инструктора, параметры от вычислительного комплекса 5 также поступают на второй вход системы 3 объективного контроля. Вычислительный комплекс 5 также передает соответствующие параметры полета на имитатор 8 навигационных и пилотажных приборов, который представляет данные параметров полета в величины сигналов, которые передаются на соответствующие элементы индикации рабочего места 7 летчика (РМЛ) и в блок отображения для отображения на экране 2 инструктора. Таким образом, на панели РМЛ 7 и на экране 2 инструктора появляются данные, определяющие параметры полета, смоделированного вычислительным комплексом 5 с учетом параметров управления, вводимых летчиком (обучаемым) и инструктором. В этой части работа устройства, реализующего заявленный способ, не отличается от известных стандартных устройств тренажеров летчиков, моделирующих параметры полета летчика (см., например, Меерович Г.Ш. и др. Авиационные тренажеры и безопасность полетов. М., Воздушный транспорт, 1991, с. 206-224, 239-244, 247-258, 296-306).
Поскольку используемые в устройстве система 4 имитации внешней визуальной обстановки, имитатор 8 навигационных и пилотажных приборов, система 3 объективного контроля представляют собой микропроцессоры, работающие по известным алгоритмам, моделирующие параметры полетов, описанные в прототипе, то выполнение этих средств и программа работы также аналогичны описанным в прототипе, отличие от которых будет указано ниже, сводится к выделению дополнительных параметров контроля полета, дополнительным параметрам отображения и дополнительным командным воздействиям на органы управления самолетом.
Летчик со своего рабочего места 7 воздействует на соответствующие органы управления 6, величины сигналов которых поступают по шинам данных на соответствующие входы вычислительного комплекса 5, который обрабатывает эти данные и передает данные параметров, соответствующих параметрам полета отображаемых навигационными и пилотажными приборами, на имитатор 8 навигационных пилотажных приборов, преобразующий эти параметры для отображения и отработки на панели РМИ 1 и панели РМЛ 7. Кроме того, соответствующие данные параметров полета вычислительный комплекс 5 передает в систему 4 имитации внешней визуальной обстановки и в систему 3 объективного контроля соответственно для преобразования и передачи данных о визуальной обстановке на РМЛ 7 и РМИ 1 и в систему 3 для контроля данных соответствующих параметров для сравнения этих параметров с заданными, а также формирования графических объемных образов самолетов, соответствующих фактической и заданной траектории полета и передачи сигналов контроля на блок отображения для индикации на экране 2 инструктора. При этом инструктор со своего рабочего места РМИ 1 наблюдает за данными, отображаемыми на экране 2, и имеет возможность вводить сигналы на входы первой группы вычислительного комплекса 5, а также инструктор осуществляет соответствующую коррекцию (например, голосом) управляющих воздействий летчика в режиме реального времени. При этом, как было указано выше, узлы 3, 4, 5 и 8 являются микропроцессорами и могут быть выполнены на базе персональных компьютеров или иных микропроцессорных средств, панели РМИ 1 и РМЛ 7 являются соответствующими блоками ввода-вывода со средствами индикации, а блок отображения с экраном является блоком отображения с монитором. При этом все перечисленные узлы связаны по шинам данных и шинам управления между собой, а ЗУ, которое также входит в состав устройства (на чертеже не показано), хранит в памяти программы работы устройства и также связано по шинам данных и управления с другими узлами устройства.
Как было указано выше, летчик на рабочем месте 7 на основе информации имитатора 8 навигационных и пилотажных приборов и системы 4 имитации внешней визуальной обстановки осуществляет управляющие воздействия посредством органов 6 управления. С рабочего места 1 инструктор задает в вычислительный комплекс 5 параметров полета условия полета, параметры метеоминимума и в том числе передает команду "N" для формирования в вычислительном комплексе 5 фактических параметров Хф. упр. управления и заданных параметров Xз.упр. управления полетом по крену, курсу и тангажу. При этом по команде "N" инструктора с РМИ 1 в вычислительном комплексе 5 формируются величины допустимых отклонений параметров полета (ΔХ) по крену, курсу и тангажу, которые поступают из вычислительного комплекса 5 на вход системы 3 объективного контроля и блок отображения с экраном 2 инструктора. Кроме того, инструктор со своего рабочего места также может формировать команду "К" для производства смещения ЛА (Асмещ.), которая поступает (может быть передана) в блок 10 формирования сигнала смещения. Параметры полета, как было указано выше, из вычислительного комплекса 5 поступают в систему 4 имитации внешней визуальной обстановки, в систему 3 объективного контроля и в имитатор 8 навигационных и пилотажных приборов, а из имитатора 8 через блок отображения на экран 2 инструктора и на рабочее место 7 летчика. Информация системы 4 имитации внешней визуальной обстановки поступает в систему 3 объективного контроля и через нее на блок отображения с экраном 2 инструктора, а также непосредственно на блок отображения с экраном 2 инструктора, обеспечивая тем самым инструктору полный объем информации, а также на рабочее место 7 летчика, обеспечивая ему визуальную картину закабинного пространства.
Как было указано выше, инструктор может контролировать возможные отклонения фактических параметров полета от заданных по программе полета. По команде "N" с рабочего места 1 инструктора из вычислительного комплекса 5 выдаются фактические "N" Хф.упр. и заданные Хз.упр. параметры управления полета по крену, курсу и тангажу, которые поступают в блок 9 формирования рассогласований, где формируют сигналы рассогласования по соответствующим параметрам управления полетов Хiф.упр.-Хiз.упр., которые поступают в систему 3 объективного контроля. Из системы 4 имитации поступают данные внешней визуальной обстановки в систему 3 объективного контроля. Указанные данные контролируются системой 3, а с учетом сигналов рассогласования параметров управления, поступающих в систему 3 из блока 9 формирования рассогласований, система 3 объективного контроля формирует и передает в блок отображения на экран 2 инструктора графические образы самолетов в виде объемных моделей, имитирующих полет по заданной и фактической траектории (первый и второй самолеты) с учетом допустимых отклонений параметров.
Первый самолет имитирует полет по заданной траектории в соответствии с полетным заданием без каких-либо отклонений от заданных параметров полета (по крену, курсу, тангажу, оставшейся дальности, боковому отклонению и по высоте), т.е. так это делается во время заданного полета. С учетом сигналов рассогласования параметров полета Хiф.упр.-Хiз.упр., которые для заданной траектории равны нулю, формируется псевдонеподвижный образ первого самолета. Заданная траектория программируется, либо записывается при эталонном полете.
Блок отображения на экране воспроизводит образ второго самолета, который располагается относительно первого в режиме реального времени в соответствии с фактическими параметрами полета (по крену, курсу, тангажу, оставшейся дальности, боковому отклонению и по высоте) с учетом допустимых отклонений параметров управления ΔХ по параметрам крена, курса и тангажа, формируемых в вычислительном комплексе 5 по команде "N", выдаваемой с рабочего места 1 инструктора и поступающих в систему 3 объективного контроля и на блок отображения с экраном 2 инструктора. С учетом сигналов рассогласования параметров управления полетом Хiф.упр.-Хiз.упр. для фактической траектории формируется образ второго самолета, показывающий изменение положения второго самолета относительно первого по управляющим воздействия с учетом допустимых отклонений параметров управления.
В случае допущения ошибок летчика при выполнении управляющих воздействий, т.е. выходе параметров за допустимые отклонения (методически допустимые отклонения могут быть от нуля до максимально возможных), инструктор на экране 2 наблюдает изменения скорости рассогласования фактических и заданных параметров полета одновременно по всем шести степеням свободы возможных перемещений ЛА в пространстве в режиме реального времени и может быстро принять решение. Т.о. в случае выдерживания летчиком параметров управления по крену, курсу и тангажу в пределах заданных допусков второй самолет (полет по фактической траектории) остается неподвижным относительно первого по всем шести степеням свободы. В противном случае второй самолет выполняет соответствующие эволюции относительно первого, что замечает инструктор на экране 2 инструктора и осуществляет соответствующую коррекцию (например, голосом) управляющих воздействий летчика. При этом летчик на рабочем месте 7 летчика через органы 6 управления изменяет параметры полета, добиваясь совпадения заданной и фактической траекторий полета, что естественным образом отражается на экране 2 инструктора, инструктор либо подтверждает летчику правильность управляющих воздействий на органы 6 управления, либо опровергает их. Все это происходит в режиме реального времени.
Таким образом, сведение (представление) описанной информации на экране 2 инструктора в единый образ из двух самолетов обеспечивает инструктору наблюдение изменения скорости рассогласования фактических и заданных параметров полета по изменению положения на экране 2 инструктора второго летательного аппарата по отношению к первому в режиме реального времени. Указанный контроль инструктор осуществляет с учетом допустимых отклонений параметров управления. При изменении скорости рассогласования на экране 2 инструктора инструктор осуществляет коррекцию (например, голосом) управляющих воздействий летчика на органы 6 управления, а изменение скорости рассогласования определяет по изменению положения на экране 2 инструктора второго ЛА по отношению к первому и упреждает управляющие воздействия (тенденцию развития управляющих воздействий) летчика на органы 6 управления путем указанной коррекции.
Кроме того, заявленный способ позволяет осуществить смещение положения ЛА, если это необходимо. Для этого по команде "К" с рабочего места 1 инструктора в блоке 10 формирования смещения формируются сигналы, определяющие это смещение, которые поступают в систему 4 имитации внешней визуальной обстановки, и система 4 формирует параметры, соответствующие указанному смещению управляемого летчиком ЛА (полет по фактической траектории). Визуальная картина системы 4 имитации внешней визуальной обстановки, соответствующая смещенному положению ЛА, выдается на РМЛ 7 и обработанная в системе 3 объективного контроля на блок отображения с экраном 2 инструктора (фиг.7), при этом, как видно из фиг.7, показания имитатора 8 навигационных и пилотажных приборов остаются без изменений. До выхода ЛА в точку принятия решения на границе горизонтальной дальности видимости из вычислительного комплекса 5 в систему 3 объективного контроля и на блок отображения с экраном 2 инструктора выдаются границы области допустимых отклонений параметров ЛА от заданной траектории.
Сигнал фактического смещения местоположения ЛА, осуществляемого с РМИ 1, поступает в систему 4 имитации внешней визуальной обстановки, из которой преобразованные данные для отображения подаются на экран 2 инструктора, с сохранением показаний имитатора 8 навигационных и пилотажных приборов, предъявляемых летчику на рабочем месте 7 летчика. Указанное действие инструктора позволяет широко использовать методические приемы по введению ошибок полета или коррекции ошибок внутри заданной области допустимых отклонений. Тем самым создаются условия для отработки навыков управления в сложных полетных ситуациях (с использованием режима коррекции управления) с возможностью реализации принципа от простого к сложному в зависимости от уровня подготовки конкретного летчика. Помимо этого формирование области допустимых отклонений на экране 2 инструктора совместно с режимом смещения позволяет создавать инструктору условия для проверки умения летчика правильно принимать решение об уходе на второй круг в условиях выхода ЛА за пределы (по информации экрана 2 инструктора) области допустимых отклонений на рубеже дальности, соответствующей границе горизонтальной дальности видимости, с которой летчик должен научиться оценивать смещения положения ЛА по системе 4 имитации внешней визуальной обстановки.
Сведение информации в единый образ из двух самолетов на экране дисплея инструктора может обеспечить устройство, описанное в заявке RU 94937001 A1, G 09 B 9/08, 10.08.1996. Входящие в состав устройства система 3 объективного контроля, рабочее место инструктора 1, рабочее место летчика 7, экран 2 инструктора используются стандартные, например такие, как описаны в RU 94024128 Al, G 09 B 9/08, 10.10.1996.
Рабочие места летчика и инструктора представляют собой модель панели управления самолетом с элементами управления и, возможно, с элементами индикации параметров полета, при этом в устройстве РМЛ и РМИ являются блоками ввода-вывода, с возможностью ввода данных и отображения данных, соответствующих параметрам полета. Блок 9 формирования рассогласования может входить в состав вычислительного комплекса 5 как один из параметров, который следует вычислять, либо он может быть отдельным блоком в виде нескольких вычитателей параметров, контролируемого рассогласования.
Блок 10 формирования сигнала смещения представляет собой отдельный узел либо также узел в составе вычислительного комплекса 5, в котором параметры изменения положения, например новые координаты, вводимые инструктором в вычислительный комплекс 5, преобразуются в параметры для преобразования этих координат в системе 4 и передачи через систему 3 объективного контроля для отображения на экране 2 блока отображения.
Все узлы системы связаны по шинам данных и управления между собой и с контроллером (на чертеже не показан), который предназначен для управления блоками, входящими в данное устройство для реализации заявленного способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБУЧЕНИЯ ПИЛОТА ПОСАДКЕ САМОЛЕТА В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 2002 |
|
RU2225039C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ЕГО ОБЕСПЕЧЕНИЯ | 1999 |
|
RU2156720C1 |
| КОМПЛЕКСНАЯ ОБУЧАЮЩАЯ СИСТЕМА ДЛЯ АВИАЦИОННЫХ СПЕЦИАЛИСТОВ | 2002 |
|
RU2267163C2 |
| СПОСОБ МОДЕЛИРОВАНИЯ НА ПИЛОТАЖНОМ СТЕНДЕ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД | 2018 |
|
RU2701062C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
| ТРЕНАЖЕР ВОЗДУШНОГО БОЯ | 2005 |
|
RU2297674C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ С МУЛЬТИПЛЕКСНОЙ СИСТЕМОЙ ИНФОРМАЦИОННОГО ОБМЕНА | 2001 |
|
RU2174485C1 |
Изобретение относится к средствам повышения летного мастерства по управлению летательным аппаратом (ЛА) в ручном режиме пилотирования. При управлении ЛА имитируют на экране полет первого ЛА в соответствии с заданными параметрами полета и полет второго ЛА в режиме реального времени в соответствии с фактическими параметрами полета управляемого ЛА. При этом второй ЛА остается неподвижным относительно первого при выдерживании летчиком параметров полета в пределах заданных допустимых отклонений. Контроль параметров полета осуществляют путем наблюдения со стороны инструктора за положением второго ЛА на экране относительно первого. При допущении летчиком ошибки и выходе параметров полета за допустимые отклонения определяют изменение скорости рассогласования фактических и заданных контролируемых параметров по изменению положения на экране второго ЛА по отношению к первому и осуществляют коррекцию инструктором управляющих воздействий летчика на органы управления ЛА. Со стороны инструктора либо подтверждают правильность управляющих воздействий, либо опровергают их. Способ обеспечивает повышение качества обучения за счет визуального контроля за отклонением фактических параметров полета только при выходе их за пределы заданного отклонения. 7 ил.
Способ обучения летчика управлению летательным аппаратом (ЛА) в режиме реального времени, заключающийся в том, что при управлении ЛА осуществляют контроль параметров полета по заданной траектории и производят коррекцию траектории полета, отличающийся тем, что имитируют на экране полет первого ЛА по заданной траектории в соответствии с заданными параметрами полета и полет второго ЛА в режиме реального времени в соответствии с фактическими параметрами полета управляемого ЛА таким образом, что второй ЛА остается неподвижным относительно первого при выдерживании летчиком параметров полета в пределах заданных допустимых отклонений, контроль параметров полета осуществляют путем наблюдения со стороны инструктора за положением второго ЛА на экране относительно первого, при допущении летчиком ошибки и выходе параметров полета за допустимые отклонения определяют изменение скорости рассогласования фактических и заданных контролируемых параметров по изменению положения на экране второго ЛА по отношению к первому и осуществляют указанную коррекцию путем коррекции инструктором управляющих воздействий летчика на органы управления ЛА, осуществляют со стороны инструктора либо подтверждение правильности управляющих воздействий летчика, либо опровержение их.
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| СПОСОБ ОБУЧЕНИЯ ЛЕТЧИКОВ ВЫПОЛНЕНИЮ ФИГУР ПИЛОТАЖА | 1991 |
|
RU2018972C1 |
| УНИФИЦИРОВАННЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ АВИАЦИОННЫЙ ТРЕНАЖЕР | 1994 |
|
RU2087037C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ВОСПРОИЗВЕДЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ТРЕНАЖЕРЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
RU2123725C1 |
| ПРОГНОЗИРУЮЩАЯ СИСТЕМА ОЦЕНКИ ЛЕТЧИКА ДЛЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 1991 |
|
RU2006958C1 |
