Изобретение относится к управлению движением группы транспортных средств в частности к системам вождения сельс кохозяйственных самоходных агрегатов. Известна система группового управления самоходными агрегатами, содержа щая датчик угла поворотаведущего агрегата, связанный через канал дистанционной передачи сигналов с блоком управления исполнительными органами ведомого.агрегата, включающим в себя датчик пройденного пути и программный регистр, устройство ориентации с излучателем йа ведущем агрегате и приемными элементами на ведомом, подключенными к усилителям с автоматической регулировкой усиления и с управляемыми делителями напряжения, к одним из входов которых подключен генератор опорного напряжения, и элемент сравнения f 1 . Недостатком известной системы является неточность и повторения ведомым агрегатом траектории ведущего агрега та, что приводит к увеличению поворотной полосы. Цель изобретения - повышение то.чности управления. Цель достигается тем, что блок управления исполнительными органами ведомого агрегата снабжен включенным между датчиком пройденного пути и программным регистром, управляемым ключевь1М элементом, триггером и подключенным к его выходу одним своим входом элементом И, подключенньм к его другому входу элементом ИЛИ, связанным своими входами с выходом исполнительного органа ведомого агрегата и с датчиком угла поворота ведущего агрегата соответственно сумматором, подключенным к одному его входу дополнительным элементом сравнения и источником эталонного сигнала, соединенным .С одним входом дополнительного элемента сравнения, другой вход которого соединен с датчиком угла поворота ведущего агрегата через канал
дистанционной передачи сигналов, при этом другой вход сумматора подключен к одному из выходов программного регистра, соединенного своим другим выходом с управляющим входом триггера, а выход сумматора соединен с управляющим входом одного из управляемьп делителей, подключенного к одному из входов элемента давления устройства ориентации.
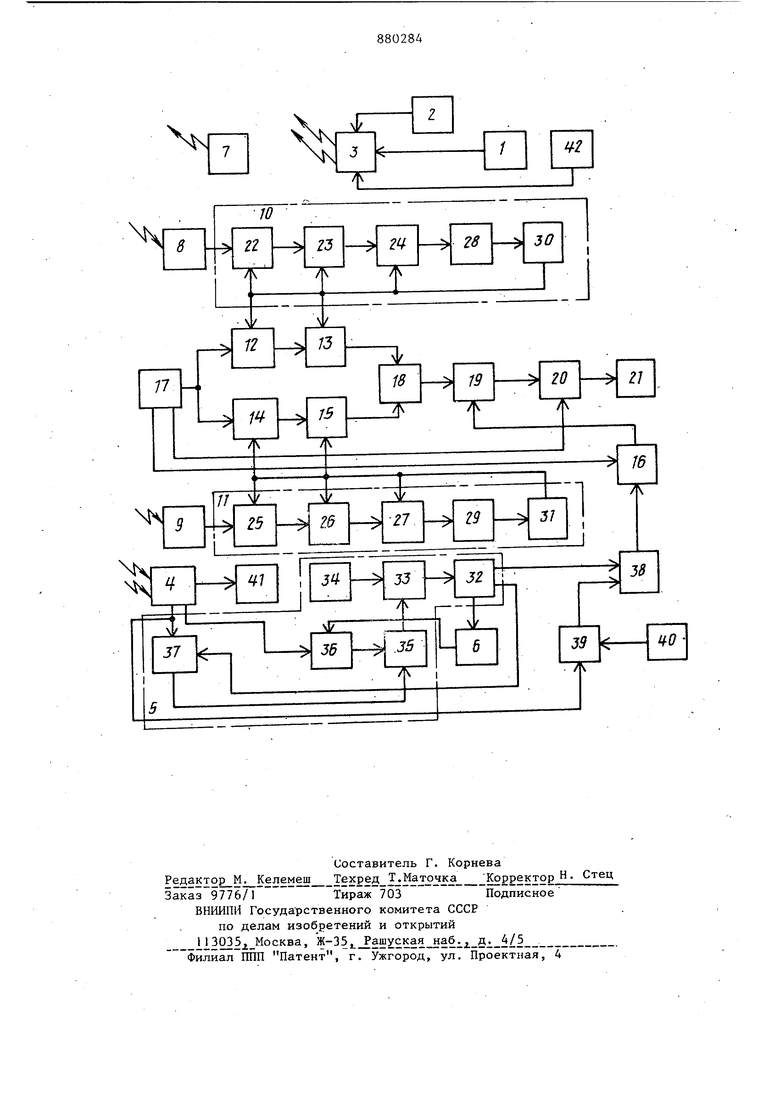
На чертеже представлена функциональная схема предлагаемой системы.
Система содержит датчик 1 угла поворота ведущего агрегата, и преобразующе-усилительный элемент 2 управления рабочим орудием ведущего агрегата, связанные через канал дистанционной передачи сигналов, включающий в себя передатчик 3 и приемник А сигналов управления, с блоком 5 управления исполнительными органами 6 ведомого агрегата. Система содержи также устройство ориентации, в состав которого входят излучатель 7, установленный на ведущем агрегате, и приемники 8 и 9, установленные на ведомом агрегате, и подключенные на их выходах усилители 10 и 11 с автоматической регулировкой усиления, а также управляемые делители 12-16, к одним из входов которых подключен генератор 17 опорного напряжения.
К выходам делителей 13 и 15 подключен блок 18 вычитания и последовательно включенные с ним элемент 19 сравнения, фазовый детектор 20 и преобразовательно-усилительный элемент 21 органов поборота ведомого агрегата. Усилители 10 и 11 состоят из последовательно включенных управляемых делителей 22-27, усилителей 28 и 29 прямого тракта и усилителей 30 и 31 обратного тракта.
Блок 5 содержит программный регистр 32, ко входу которого подключе управляемый ключевой элемент 33, соединенный своими входами с датчиком 34 пройденного пути и элементом 35 И входы которого соединены с выходами элемента 36 ИЛИ и триггера 37. Входы элемента 36 ИЛИ подключены к выхода прие1 ника 4 и элемента 6. Один из выходов регистра 32 подключен к одному из входов триггера 37, другой вход которого соединен через канал дистанционной передачи сигналов с датчиком 1. Другой выход регистра 32 подключен к одному из входов - сумматора 38, другой вход которого соединен с выходом дополнительного элемента 39 сравнения, входы которого соединены со входом блока 5 и.источником 40 эталонного сигнала. Выход сумматора 38 соединён с управляющим входом делителя 16, подключенного своим выходом к одному из входов элемента 19 сравнения устройства ориентации. К одному из выходов приемника 4 подключен преобразующе-усилителный элемент 41 управления муфтой сцеления ведомого агрегата, а к одному из входов передатчика 3 - элемент 42 управления муфтой сцепления ведущего агрегата.
Устройство работает следующим образом.
Сигнал излучателя 7, воспринимаемый приемниками 8 и 9, поступает на вход соответствующих усилителей 10 и 11. Коэффициенты передачи каждого из управляемых делителей 22-27 пропоциональны расстоянию от излучателя 7 до соответствующего приемника 8 или 9., Так-как коэффициенты передачи управляемых делителей 12-15, включенны последовательно к выходу генератора опорного напряжения 17, равны коэффициентам передачи управляемых,делителей 22-27, то .сигналы на выходе управляемых делителей 13 и,15 пропорциональны квадратам расстояний от излучателя 7 до приемников 8 и 9. Сигналы с выходов управляемых делителей 13 и 15 подаются на блок 18, : выходной сигнал которого поступает на один из входов элемента 19. На второй его вход через управляемый делитель 16 поступает эталонный сигнал с одного из выходов генератора 17, соответствующий заданному эквидистантному расстоянию между агрегатами на гоне. С выхода элемента 19 сигнал подается на один из входов фазового детектора 20, на второй вход которого поступает коммутирующий сигнал с другого выхода генератора I7. Следовательно сигнал на выходе фазового детектора 20 соответствует смещению ведомого агрегата относительно ведущего в направлении перпендикулярном их траектории движения.
При движении ведомого агрегата относительно ведущего на заданном эквидистантном расстоянии сигнал на выходе блока 18 не изменяется, а, слдовательно, сигнал на выходе фазового детектора 20 равен нулю. При смещении ведомого агрегата от заданной траектории движения изменяются коэф фициенты передачи управляемых делит лей 12-15, что приводит к изменению сигнала на выходе блока 18 и, следо вательно, на выходе фазового детект ра 20. Величина и фаза этого сигнал соответствует величине и направлени смещения ведомого агрегата относительно заданной траектории движения Этот сигнал поступает на преобразующе-усилительный элемент органов пово рота ведомого агрегата 21, который вертает последний на заданную траекторию движения. При подходе ведущего агрегата с гона к границе поворотной полосы водитель переводит рабочее орудие в транспортное положение и начинает осуществлять поворот ведущего агрегата. При этом cигIiaл с элемента 2 через канал дистанционного управления и элемент ИЛИ 36 поступает на один из входов элемента 35 И. Сигнал датчика 1 также через канал дистанционного управления поступает на один из входов триггера 37. Триггер 37 срабатывает и подает сигнал на второй вход элемента И 35. Таким образом, наличие сигналов на обеих входах элемента 35 говорит о том, что рабочее орудие ведущего агрегата находится в транспортном положений и ведущий агрегат начинает осуществлять поворот. В результате этого на выходе элемента 35 появляется сигнал, который открывает элемент 33 для пропускания импульсов датчика 34 пройденного пути на программный регистр 32. Регистр 32 по заданной программе с помощью управляемого делителя 16 изменяет эталонный сигнал элемента 19 таким образом что ведомый агрегат до границы гон поворотная полоса движется параллель но траектории движения ведущего агрегата. Причем при проходе этой границы ведомым агрегатом- по команде программного регистра, время выдачи которой определяется количеством импульсов датчика 34 (интервальным расстоянием между агрегатагш), производится перевод рабочего орудия ведомого агрегата в транспортное положение с помощью преобразующе-усили тельного элемента 6. После прохождения ведомым агрегатом поворотной полосы ведомь1й агрегат также по зад ной программе начинает выстраиваться 846 в колонну с ведущим агрегатом. После окончания поворота и выстраивания агрегатов в колонну (т.е. после окончания программы), выходным сигналом программного регистра 32 производится переключение триггера 37. В резулы:тате этого выходной сигнал триггера 37, поступающий на элемент И 35, исчезнет, и элемент 33 прекратит подачу импульсов датчика 34 пройденного пути на программный регистр 32, т.е. на поворотной йолосе агрегаты двигаются в колонне. При подходе ведущего агрегата ко второму повороту, т.е. к выходу на гон, водитель начинает поворачивать агрегат. При этом сигнал датчика 1 угла поворота ведущего агрегата по каналу дистанционного управления поступает на триггер 37, который срабатывает и через элемент И 35 и элемент 33 дает разрещение для прохождения импульсов датчика 34 пройденного пути на программный регистр 32. Регистр 32 посредством изменения эталонного сигнала элемента 19 с помощью управляемого делителя 16 осуществляет изменение эквидистантного расстояния ведомого агрегата таким образом, что последний выходит па границу поворотная полоса - гон со смещением, равным ширине захвата рабочего орудия. При прохождении ведущим агрегатом границы гон - поворотная полоса водитель переводит агрегатируемое орудие в рабочее положение..В этот момент сигнал, несущий информацию о пйложении агрегатируемого орудия ведущег о агрегата, на одном из входов элемента ИЛИ 36 исчезает. Для того, чтобы в этот момент программа движения ведомого агрегатане прервалась, на втором входе элемента 36 присутствует выходной сигнал преобразующе-усилительного элемента 6. При выходе ведомого агрегата на границу гон - поворотная полоса по заданной программе сигналом регистра 32 и с помощью элемента 6 происходит перевод агрегатлруемого орудия ведомого агрегатав рабочее положение. В этот же момент выходной сигнал элемента 6, поступающий на один из входов элемента ИЛИ 36, исче-г зает. Одновременно заканчивается отработка программы выхода ведомого агрегата с поворотной полосы на гон и одним из выходных сигналов програм-много регистра 32 триггер З/ перебрасывается в такое положение, при котором его выходной сигнал исчезает. Следовательно, на входах элемента И 35 сигналы отсутствуют. В результате этого элемент 33 закрывается и поступление импульсов датчика 34 пройденного пути на вход программного регистра 32 прекращается, т.е. при движении агрегатов на гоне программный регистр 32 не работает. Для точной обработки программы движения ведомого агрегата на поворотной полосе водителю ведущего агрегата необходимо выдерживать заране заданный радиус поворота ведущего аг регата, что не всегда удается. С целью устранения влияния неточности поддержания водителем заданного ради уса поворота ведущего агрегата на качество вождения ведомого агрегата в схеме предусмотрена коррекция выходного сигнала программного регистра 32, поступающего на управляемый делитель 16, с помощью сигнала, несу щего информацию об угле поворота ведущего агрегата. Этот сигнал при дос тижении определенной величины с датчика 1 угла поворота ведущего агрегата по каналу дистанционного управления поступает наодин из входов элемента 39, на второй вход которого поступает эталонный сигнал источника 40, величина которого эквивалентна заданному радиусу поворота ведущего агрегата. Таким образом, на выходе элемента 39 будет сигнал ощибки, величиka и фаза которого несут информа цию о величине и направлении отклонения ведущего агрегата от заданного радиуса поворота. Этот сигнал ошибки поступает на сумматор 38, где суммируясь с основным сигналом программного регистра, производит коррек цию эталонного сигнала генератора 17 таким образом, чтобы при отклонении ведущего агрегата от заданного радиуса поворота,..ведомый агрегат не изменял свой радиус поворота. В системе предусмотрена синхронная остановк ведомого агрегата с ведущим агрегатом с помощью сигнала элемента 42 уп равления муфтой сцепления ведущего агрегата, который через канал дистанционного управления воздействует иа преобразующе-усилительный элемент 41 муфты сцепления ведомого агрегата Использование предлагаемой систе мы, обеспечивающей возможность управ ления одним трактористом несколькими машинно-тракторными агрегатами, повы шает производительность труда в сель ском хозяйстве, сокращает требуемое количество механизаторов и повышает качество выполняемой работы. Формула изобретения Система группового управления самоходными агрегатами, содержащая датчик угла поворота ведущего агрегата, связанный через канал дистанционной передачи сигналов с блоком управления исполнительными органами ведомого агрегата, включающим в себя датчик пройденного пути и программный регистр, устройство ориентации с излучателем на ведущем агрегате и приемными элементами на ведомом,подключенными к усилителям с автоматической регулировкой усиления и с управляемыми делителями напряжения, к одним из входов которых подключен генератор Ьпорного напряжения, и элемент сравнения, отличающаяся тем, что, с целью повышения точности управления, блок управления исполнительными органами ведомого агрегата снабжен включенным между датчиком пройденного пути и программным регистром, управляемым ключевым элементом, триггером и подключенным к его выходу одним своим входом элементом И, подключенным к его другому входу элементом ИЛИ, связанным своими входами с выходом исполнительного органа ведомого агрегата .и с датчиком угла поворота ведущего агрегата соответственно сумматором, подключенным к одному его входу дополнительным элементом сравнения и источником эталонного сигнала, соединенным с одним входом дополнительного элемента сравнения, другой вход которого соединен с датчиком угла поворота ведущего агрегата через канал дистанционной передачи сигналов, при этом другой вход сумматора подключен к одному из выходов программного регистра, соединенного своим другим выходом с управляющим входом триггера, а выход сумматора соединен с управляющим входом одного из управляемых делителей, подключенного к одному из входов элемента сравнения устройства ориентации. Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР 615880, кл. А 01 В 69/04 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| Устройство для автоматического направления движения самоходных агрегатов | 1977 |
|
SU615880A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Устройство для автоматического управления движением самоходного агрегата | 1979 |
|
SU767710A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Система автоматического управления режимом работы почвообрабатывающего агрегата | 1984 |
|
SU1259969A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Способ дублерного вождения машинно-тракторных агрегатов | 1985 |
|
SU1382417A1 |