лов в координаты, причем выход сумматора соединен с входом одного нз преобразователей частоты, а выходы нрнемппков - - с антеннами всенанравленного действия с входамн других преобразователей частоты, при этом выходы преобразователей чаетоты соединены с вторым входом устройства преобразованпя сигналов в координаты посредством соответствующих фнльтров н фазоизмерительного устройства, а нх вторые входы - с соответствуюнцши выходами гетеродина.
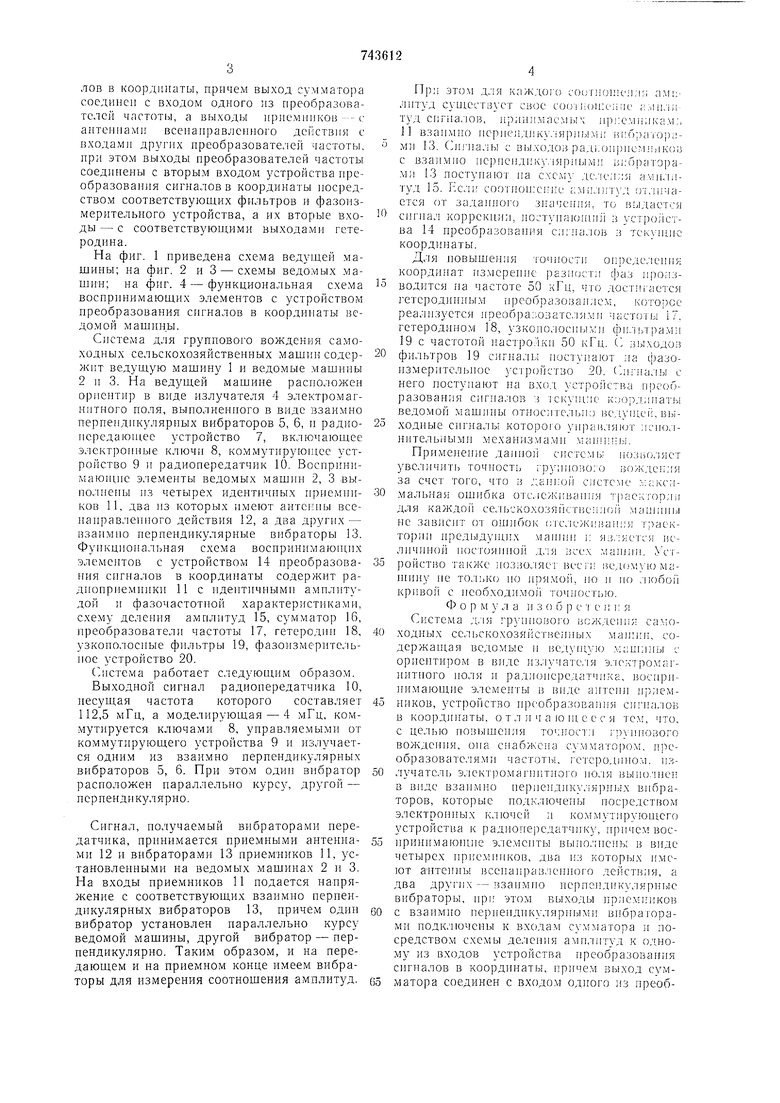
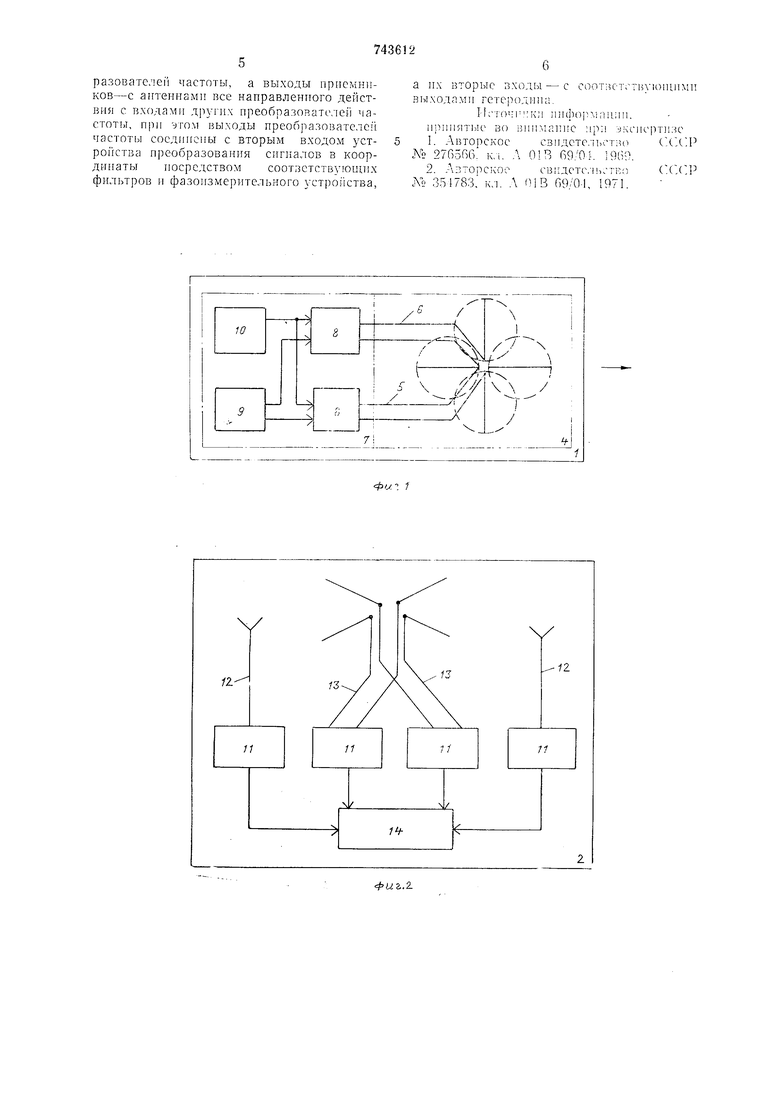
На фиг. 1 приведена схема ведущей машнны; на фиг. 2 н 3 - схемы ведомых мащин; на фиг. 4 - функциональная схема воспринимающих элементов с устройством преобразования сигналов в координаты ведомой машины.
Система для группового вождения самоходных сельскохозяйственных машин содержит ведущую машину 1 и ведомые машины 2 и 3. На ведущей машине расположен ориентир в виде излучателя 4 электромагнитного поля, выполненного в виде взаимно перпепдпкулярных вибраторов 5, 6, н радионередаюп1ее устройство 7, включающее электронные ключи 8, коммутирующее устройство 9 и радиопередатчик 10. Воспринимаюии1е элементы ведомых машин 2, 3 выполнены из четырех идентичных ириемников 11, два из которых имеют антенны всепаправлениого дейетвия 12, а два других - взаимно нерпенднкулярные вибраторы 13. Функцпональная схема военринпмаюниьх элементов с устройством 14 преобразования снгналов в координаты содержит радиоприемники 11 с идентичными амплитудой и фазочастотпой характеристнкамн, схему деленпя амплитуд 15, еумматор 16, преобразователи чаетоты 17, гетероднп 18, узкоиолосиые фильтры 19, фазоизмергггельное устройство 20.
(л1етема работает следующим образом.
Выходной сигнал радиопередатчика 10, нееущая частота которого составляет 112,5 мГц, а моделирующая - 4 мГц, коммутируетея ключами 8, управляемыми от коммутирующего устройства 9 и излучается одним из взаимно перпендикулярных вибраторов 5, 6. При этом один вибратор расположен параллельно курсу, другой - перпендикулярно.
Сигнал, нолучаемый вибраторами передатчика, принимается приемными антеннами 12 н вибраторами 13 нриемников 11, установленными на ведомых машинах 2 и 3. На входы приемннков 11 подается напряжение с соответствующих взаимно перпендикулярных вибраторов 13, причем один вибратор установлен параллельно курсу ведомой машины, другой вибратор - нернендикулярно. Таким образом, и на передающем и на приемном конце имеем вибраторы для измерения соотношения амплитуд.
Прл этом для кг1/кдо1() сч)(;-Т1КЛ1:е;|; :-; литуд сунцствует свое cooiiion. r;:iiii.iji туд сигна/юв, ириил ласмьг; иргемнлкам:, 11 взаимно нер|1е),) lii-npaYOj);:ми 13. Слиналы с выходов рад;.оприсммикои с взаимно перпендикулярными В1;браторамл 13 постуиают на схему де. амплитуд 15. Ьсли соот1юи:с пк ;;Mii:i}rr vi о-Л чается от заданного значения, то 15ыдаетоя снгиал коррекции, иостуиаюипи з ycTpoiJcrва 14 преобразования ciniia.iois is Tci yimic координаты.
Для повыщения i4j4iiocTii ог1)еде;1еник координат из.мереиие разиост; фаз производится на частоте 50 кГц, что достигается 1етеродиниьг.м преобразоваилем, которое реа.щзуется иреобра;:.овате.:1я.п1 частспы 17. гетеродино.м 18, узкоиолоспыми ф11,;п трамп 19 с частотой иастролкп 50 кГц. С выходе; фильтров 19 сигналы поступают иа фазоизмерительиое устройство 20. (л|;-иалы с него поступают на вход устройства преобразования сигпа.пов 3 текущие )|1д:п1ат -л ведомой машины относительи;) всдупк :, выходные еигиалы которого уираилякгг :ic.4io,iн и т е л ь м ы м 11 .м с х а н и з м а м 11 м а и i н п ы.
Применение даиио) систем ; поз1)Гл1яет увеличить точиость груиноиого вождеиля за счет того, что в данной системе }.:;:1 сималы-1а51 ошибка отс.1е/К1;ва1111я т|)г е;-:тор;п для каждой се:1ьскохозяйст15е 1И()Г маил1иы не зависнт от ошибок 1;тслижпнап1;я траектории иредыдунгнх манпп i; язляется iicличино постоянной д.:я всех MaiHiiH. Устройство также и()31ю:1яег Beciii ) мащииу не то;1ько но иря.мо, но и по лк)боГ| KpiiBoii с пеобходггмо1 | тсяпгостью.
Ф о р м л а и 3 о б р е т е i i; я
Система д.-|я груинового вождепп;; самоходных сельскохозяйственных маииш, содержап1ая ведомые н ведущую .;аи1;1иьг с ориентиром в виде из.:1учате,1я э.чектро.магиитного ноля и радионередатчикг, восирннимающие элементы в виде аитеии ирлемников, уетройство и|Кобразова1111я сигпа.юв в координаты, о т л и ч а ю HI е е с я тем, что, с целью новьниегьчя точности нового вождепня, она спабж:еиа сумматором, iijieобразователями частоты, гстсродипом. излучатель электромагнитио1Т1 поля выиолнеи в виде взаимно пернеидикуляриых вибраторов, которые подключенгл посредетвом электронных ключей и коммутируюп1его устройетва к радиопередатчику, п }нчем воспринимающие элементы выпо, в виде четырех приемников, два из которых имеют антеи гы всепаирав,пенного дейетвия, а два других - взапмпо иерпендикулярь-ые вибраторы, этом выходы приемников с взаимно нерненднкулярными внбраторами подк.чючены к входам сум латора и поередством схемы де.тения амплитуд к одному из входов уетройства гфеобразования сигналов в коордннаты, причем выход сумматора соединен с входом одного из нреобразователей частоты, а выходы приемников-с аптеннал и все направленного действия с входами других преобразователей частоты, при этом выходы преобразователе частот с вторым входом устройства преобразования сигналов в координаты посредством соот15етству опи1х фильтров п фазо змерителы-1ого устроГ етва,
СООТ;иЛ Т П1О1 и МН
II
ОЧГ;К; ИИ(1Ю|П|;
1 р П1ЯТ1)е во в11Пл а П С up: 1. Авторское свндетс/п, № 27G56G. 4,i. Л 01В 69/0}.
351783, л. Л OiB 09/0-1, 197
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для группового вождения самоходных сельскохозяйственных машин | 1981 |
|
SU969187A2 |
| Система для группового вожденияСАМОХОдНыХ СЕльСКОХОзяйСТВЕННыХМАшиН | 1979 |
|
SU818518A1 |
| Устройство для группового вождения самоходных машин | 1985 |
|
SU1308221A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1987 |
|
SU1531874A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1192658A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1197573A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОВЫМ ВОЖДЕНИЕМ МАШИН | 1999 |
|
RU2172085C2 |
| Устройство для контроля внеполосных спектров излучения радиопередатчиков | 1991 |
|
SU1829121A1 |
| Устройство для контроля внеполосных спектров излучения радиопередатчиков | 1989 |
|
SU1674389A1 |
| Устройство измерения параметров радиосигналов пространственно-распределенной системы радиопередатчиков с использованием беспилотного летательного аппарата | 2024 |
|
RU2818856C1 |

/
f2
