Изобретение относится к машиностроению, может найти применение при обработке деталей сложной геометрической формы и в ряде случаев способно заменить универсально-сборные приспособления.
Известны тиски переналаживаемые универсальные с поднятыми губками, содержащие неподвижную и подвижную губки, перемещаемые винтом [1]. Тиски предназначены для зажима деталей сложной конфигурации.
Недостатком данных тисков является то, что зажим деталей сложной конфигурации обеспечивается расположением губок на значительной высоте от основания, т. е. предполагается, что контакт рабочих губок осуществляется не по сложному профилю зажимаемой детали, а, например, по плоской ее части или части, имеющей простую геометрическую форму. В противном случае профиль сменных губок должен быть выполнен по части профиля зажимаемой детали.
Другим аналогом являются "Тиски с пальцами", содержащие подпружиненные стержни, охватывающие зажимаемую деталь, нажимные винты, через плитку фиксирующие пальцы в установленном положении [2].
Недостатком данных тисков является то, что необходимо фиксировать через нажимную плиту пальцы в установившемся положении, при этом усилие зажима от разных пальцев неодинаково. Кроме того, сжимая пакет стержней одной плитой, практически можно зафиксировать только два ряда (по вертикали) стержней. Остальные стержни не будут зафиксированы.
Наиболее близкими по технической сущности являются тиски контурные, содержащие основание, ходовой винт, подвижный и неподвижный полые корпуса с пакетами пальцев, в полости корпусов помещены шарики, взаимодействующие с тыльными частями пальцев [3]. В этом устройстве пальцы выполнены гладкими и при эксплуатации нужно следить, чтобы они не выпадали, так как нет ограничительных решеток (или другого устройства).
Целью настоящего изобретения является создание тисков для зажима деталей сложной геометрической формы, удобных в эксплуатации, с обеспечением заданного усилия зажима, с возможностью силового зажима детали без предварительной наладки тисков.
Данная цель достигается тем, что в известных контурных тисках, содержащих основание, подвижный и неподвижный полые корпуса с пакетами пальцев в направляющих решетках, ходовой винт, согласно изобретению, в полостях корпусов помещены шарики, взаимодействующие с тыльными частями пальцев и позволяющие пальцам самоустанавливаться по конфигурации зажимаемой детали. Пальцы таких тисков выполнены двухступенчатыми. Сечение ступени меньшего поперечника выполнено по конфигурации отверстий направляющей решетки, а большее сечение - прямоугольным, с таким расчетом, что пакет пальцев плотно без просветов заполняет внутреннее сечение полого корпуса. Такое выполнение пальцев не позволяет им выпадать из корпуса через направляющую решетку и не дает возможность шарикам заклинивать пальцы. На ходовом винте в подвижном корпусе установлены две пружины, а между пружинами - гайка со шпонкой. Шпонка взаимодействует с пазом в подвижном корпусе, не позволяя гайке вращаться и заставляя ее перемещаться поступательно в ту или иную сторону в зависимости от направления вращения ходового винта. На этом же ходовом винте у направляющей решетки подвижного корпуса установлена упорная втулка, отверстие в которой должно быть больше диаметра пружины. Упорная втулка не позволяет гайке деформировать пружину до соприкосновения витков, чем увеличивает точность установки зажимного усилия и продляет срок службы тисков. Для определения усилия зажима на основании тисков установлена динамометрическая шкала, а на подвижном корпусе - указательная стрелка.
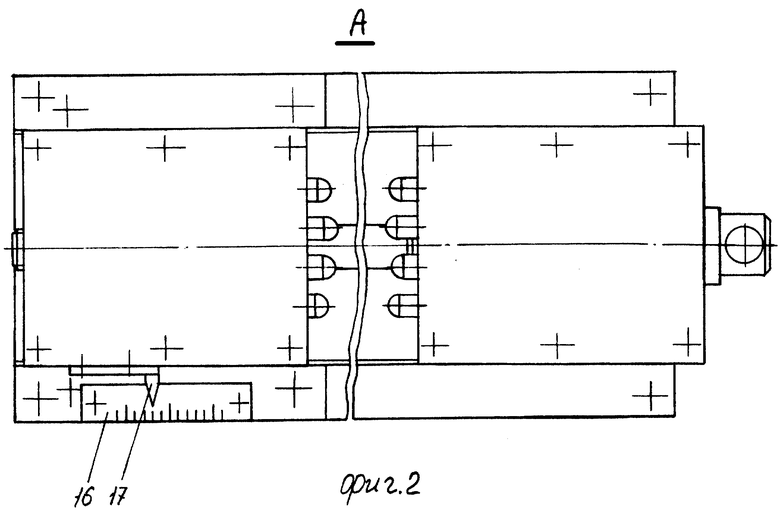
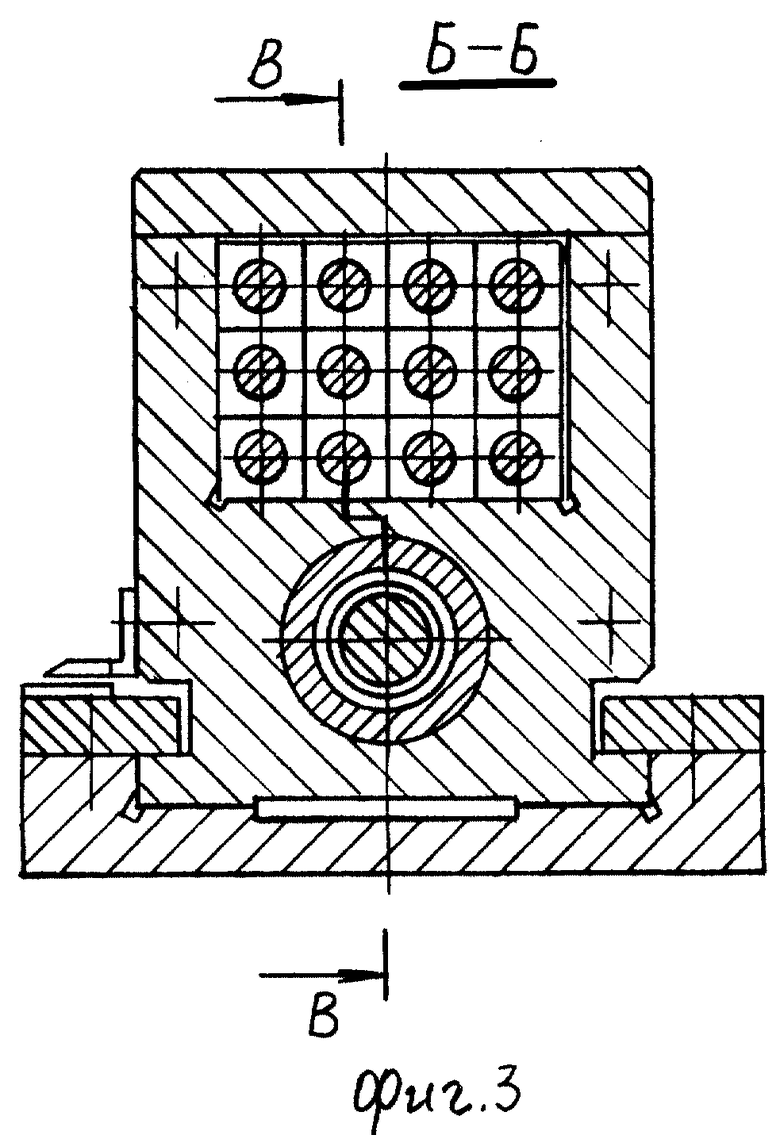
Предлагаемые тиски контурные динамометрические поясняются чертежами, где на фиг. 1 изображено продольное сечение тисков В-В, на фиг. 2 - вид А фиг. 1 (вид в плане), на фиг. 3 - сечение Б-Б фиг. 1.
Тиски контурные динамометрические содержат основание 1, подвижный корпус 2, установленный в направляющих основания 1. В отверстии подвижного корпуса 2 установлена гайка 3 с возможностью осевого перемещения под действием винта 4. От вращения вокруг оси гайка 3 фиксируется шпонкой 5, расположенной в пазу 6 подвижного корпуса 2. С упором в один из торцов гайки 3 на винте 4 установлена пружина 7, вторым концом упирающаяся в направляющую решетку 8, укрепленную на подвижном корпусе 2. В отверстии подвижного корпуса 2 с охватом пружины 7 напротив гайки 3 установлена упорная втулка 9. С другой стороны гайки установлена возвратная пружина 10. В полости подвижного корпуса 2 размещен пакет пальцев 11 прямоугольного сечения с возможностью осевого перемещения, с одной стороны от пальцев 11 расположена направляющая решетка 8, через отверстия которой, не касаясь стенок, выступает их цилиндрическая часть. С тыльной стороны пальцев 11 в полости подвижного корпуса 2 размещены стальные термообработанные шарики 12. Соосно подвижному корпусу 2 на основании 1 закреплен неподвижный корпус 13, в полости которого также размещен пакет пальцев 11, с одной стороны от пальцев 11 расположена направляющая решетка 14, через отверстия которой, не касаясь стенок, выступает их цилиндрическая часть. С тыльной стороны пальцев 11 в полости неподвижного корпуса 13 также размещены шарики 12. Подвижный корпус 2 перемещается посредством вращения винта 4 за рукоятку 15. На основании 1 укреплена шкала 16, а на подвижном корпусе 2 - стрелка 17, указывающая усилие, с которым зажимается обрабатываемая деталь. При расположении всех пальцев 11, сдвинутых навстречу друг другу до упора в направляющие решетки 8 и 14, полости корпусов 2 и 13 заполнены шариками 12 не полностью (не показано).
Тиски работают следующим образом.
Перед началом работы подбирается пружина 7 с необходимым усилием сжатия и устанавливается в тиски. По контрольному прибору, например динамометру, производится тарирование тисков. Закрепляемая деталь (не показана) устанавливается между пальцами 11 подвижного и неподвижного корпусов. Вращением винта 4 гайка 3 движется в сторону неподвижного корпуса 13, пружина 7 сжимается и перемещает подвижный корпус 2 в сторону неподвижного корпуса 13, пальцы 11 упираются в зажимаемую деталь и, за счет того, что полости корпусов 2 и 13 заполнены шариками не полностью, перемещаются в них и самоустанавливаются, охватывая контур зажимаемой детали, а шарики 12 заполняют весь объем полостей корпусов 2 и 13 (со стороны торцов пальцев). Усилие зажима детали считывается со шкалы 16 и доводится до заданной величины вращением винта 4. При необходимости более сильного зажима детали дальнейшим вращением винта 4 гайка 3 перемещается до упора во втулку 9, действие пружины 7 прекращается, а усилие зажима детали определяется усилием руки, действующей на рукоятку 15. Для освобождения детали винт 4 вращают в обратную сторону, гайка 3 через возвратную пружину 10 давит на подвижный корпус 2 и перемещает его. Зажим следующей детали производится за счет нового перераспределения шариков в полостях корпусов 2 и 13 под действием на них пальцев 11 без предварительной подачи последних до упора в направляющие решетки 8 и 14.
Источники информации
1. А.К. Горошкин. Приспособления для металлорежущих станков. - М.: Машиностроение, 1979. - С. 50.
2. Тиски с пальцами // Изобретатель и рационализатор, 1991, N 7, с. 19.
3. Патент GB 1227530A, 07.04.1971, B 25 B 1/20 - прототип,
| название | год | авторы | номер документа |
|---|---|---|---|
| Зажим высокого давления | 1985 |
|
SU1452468A3 |
| СЛЕСАРНЫЕ ТИСКИ | 2003 |
|
RU2247645C1 |
| ТИСКИ (ВАРИАНТЫ) | 1994 |
|
RU2124979C1 |
| Устройство А.В.Ремизовича для обработки сферических поверхностей деталей | 1990 |
|
SU1731600A2 |
| Тиски | 1990 |
|
SU1747249A1 |
| Зажимное устройство | 1988 |
|
SU1713791A1 |
| СТАНОЧНЫЕ ТИСКИ | 1993 |
|
RU2091203C1 |
| Автомат для гибки проволоки | 1989 |
|
SU1664444A1 |
| Магнитные тиски | 1989 |
|
SU1717327A1 |
| ПРЕЦИЗИОННЫЕ ТИСКИ | 1993 |
|
RU2056995C1 |
Изобретение относится к машиностроению, может найти применение при обработке деталей сложной геометрической формы. Тиски контурные динамометрические содержат основание, ходовой винт, подвижный и неподвижный полые корпуса с пакетами пальцев. В полости корпусов помещены шарики, взаимодействующие с тыльными частями пальцев. Подвижный и неподвижный полые корпуса имеют направляющие решетки, которыми ограничено перемещение пальцев. Пальцы выполнены ступенчатыми, причем меньшее сечение каждого пальца выполнено по конфигурации отверстий направляющей решетки. На ходовом винте в подвижном корпусе установлены две пружины, а между пружинами - гайка со шпонкой, взаимодействующей с пазом подвижного корпуса. У направляющей решетки подвижного корпуса установлена упорная втулка с охватом одной из упомянутых пружин. Данные тиски можно использовать для зажима деталей сложной геометрической формы, они удобны в эксплуатации, обеспечивают заданное усилие зажима, имеется возможность силового зажима детали без предварительной наладки тисков. 3 ил.
Тиски контурные, содержащие основание, ходовой винт, подвижный и неподвижный полые корпуса с пакетами пальцев, в полости корпусов помещены шарики, взаимодействующие с тыльными частями пальцев, отличающиеся тем, что подвижный и неподвижный полые корпуса имеют направляющие решетки, которыми ограничено перемещение пальцев, пальцы выполнены ступенчатыми, причем меньшее сечение каждого пальца выполнено по конфигурации отверстий направляющей решетки, на ходовом винте в подвижном корпусе установлены две пружины, а между пружинами - гайка со шпонкой, взаимодействующей с пазом подвижного корпуса, у направляющей решетки подвижного корпуса установлена упорная втулка с охватом одной из упомянутых пружин, при этом тиски контурные являются динамометрическими.
| Изобретатель и рационализатор, 1991, №7, с.19 | |||
| Устройство подогрева контактной подвески | 1984 |
|
SU1227530A1 |
| US 4752063 A, 21.06.1988 | |||
| Почвообрабатывающее орудие | 1988 |
|
SU1542435A1 |
| СПОСОБ ПОЛУЧЕНИЯ КОРМОВОЙ ДОБАВКИ ИЗ СОКА РАСТЕНИЙ | 1999 |
|
RU2171035C2 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| Тиски для зажима деталей сложной формы | 1983 |
|
SU1146182A1 |

